本文主要是介绍2011年认证杯SPSSPRO杯数学建模A题(第一阶段)客机水面迫降时的姿态全过程文档及程序,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
2011年认证杯SPSSPRO杯数学建模
A题 客机水面迫降时的姿态
原题再现:
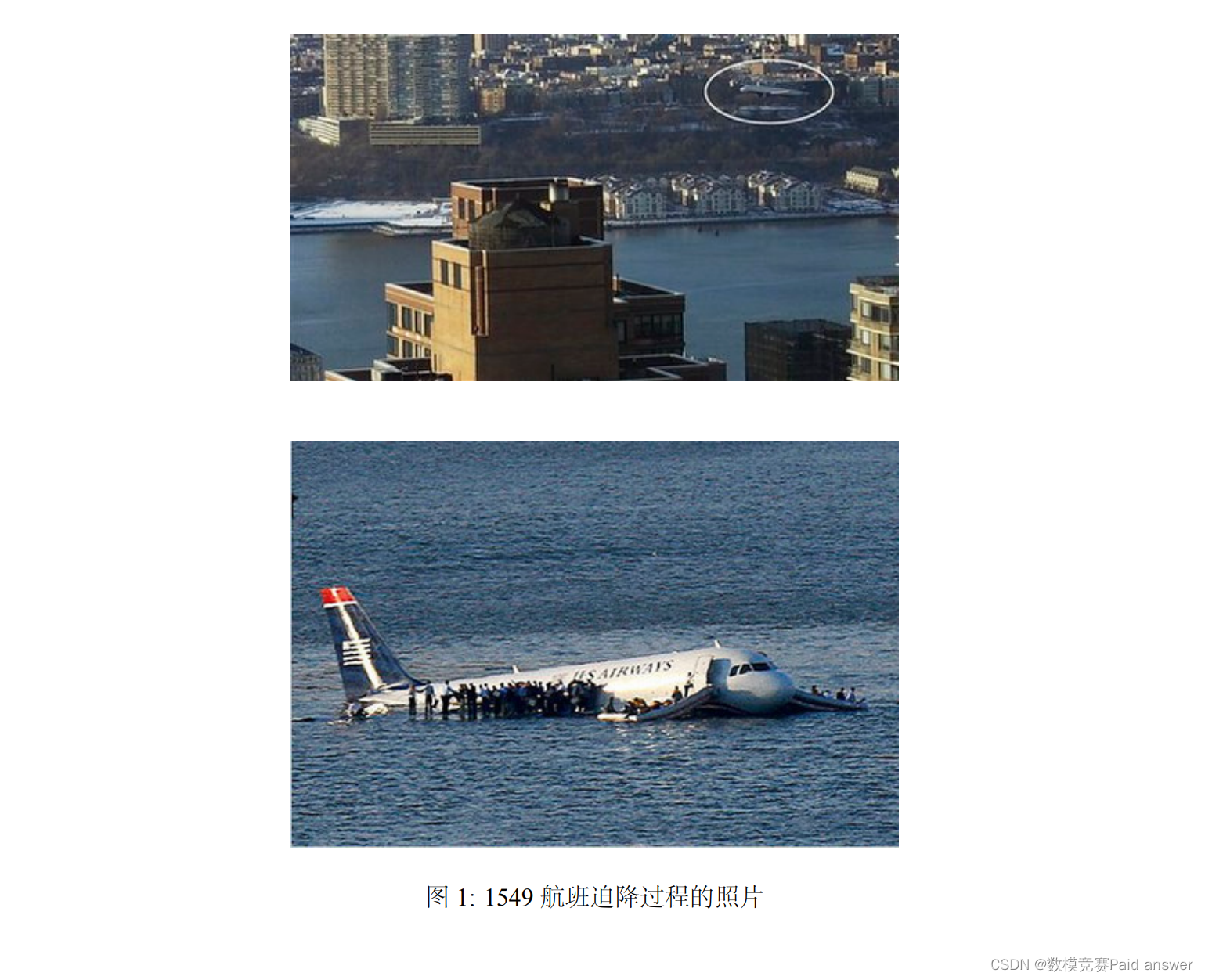
2009 年 1 月 15 日下午(美国东部时间),US Airways 所属第 1549 航班(空中客车 A320 客机)在起飞后不久在纽约哈德逊河紧急迫降。经及时救助,机上 155 人(其中包括两名机师和三名乘务人员)在飞机沉没之前全部获救。该起事故造成 78 人受伤,无人死亡。这架客机从纽约长岛拉瓜迪亚机场起飞约 90 秒后遭飞鸟撞击,导致两个发动机损坏。机长萨伦伯格凭借着出色的驾驶技术和冷静的判断使飞机迫降在哈德逊河河面。而飞机上的乘客在乘务员的指挥下,有秩序地逃出紧急舱门并全部获救。
第一阶段问题:
问题: 大型客机因为失去动力而进行的迫降具有相当大的危险性。请你建立合理的数学模型,对客机在平静水面上的迫降进行分析,指出客机在河面上迫降时,以何种姿态接触水面是相对最好的选择。
整体求解过程概述(摘要)
随着飞机的日益普及,飞机故障等问题层出不穷,飞机水面迫降也成为发生坠机时驾驶员首要选择之一。为了让飞机更加安全的着陆,保障众多旅客的安全,我们研究的这一课题就显得意义尤为重要。
题目要求我们求出飞机的最佳降水姿态。飞机是无动力迫降在静的水面上的。针对这一题目,我们采用数学建模中的层次分析法,研究应力分析和滑翔时间这两个问题。首先,我们把飞机看成力学里面的梁构件进行分析,建立比例模型一。通过动量守恒定律、达朗贝尔原理、截面法等力学知识确定飞机碰撞水面一瞬间造成的冲击应力的大小。并且此剪应力必须小于等于飞机材料的许用应力,以免撞击水面一瞬间给飞机造成巨大杀伤力摧毁飞机。通过计算和 MATLAB 绘图,得到飞机接触水面长度x与夹角θ应满足的关系。
其次,在滑翔时间问题中,我们把飞机的漏水部位简化,建立模型二,得到主要漏水部位,然后根据它们的流量计算出飞机迫降时的最佳位置。这两个模型的公共约束解即为飞机最佳迫降角度和触水长度。最终我们运用阿基米德原理,列出飞机在滑翔时浮力与重力等关系表达式,求解出飞机的滑翔时间和飞机漂浮前飞机排开水的体积,得到了飞机此时最低吃水深度,为漂浮争取了更多的时间,让旅客有充足的时间逃离飞机。
问题分析:
飞机迫降姿势的选取
水上迫降时,飞机与水面接触瞬间就是面载荷,与地面撞击相比,撞击载荷又相对较小,导致常规的缓冲吸能部件压溃较小,难以发挥效能,同时由于起落架无法正常工作,未被吸收的能量很可能造成机体结构的损坏,由此水上迫降有可能导致比地面撞击更严重的伤害。因此我们要选择一个飞机与水面接触的最佳位置,已达到对飞机的损坏最小。
如果机身下部蒙皮破裂,那么水将流入机舱,乘员很难有充足的时间逃离,而飞机过快沉没事水上迫降失败的致命原因。所以我们认为飞机不会以整个底面先接触水。若飞机斜侧着先接触水面,由于飞机速度很快,与水面必将产生很大的撞击力,足以拍断机翼,进而大量海水进入客舱,危及乘客生命。同时,飞机降落时应该是平衡的,否则海水会将飞机迅速吞入海中,因此飞机不能以斜侧的姿态接触水面。飞机降落应该是柔和的,没有俯冲或跳跃,向前减速度不能太大,撞击压力和滑翔压力也不能太大,而因为俯冲会给飞机造成灾难性破坏,跳跃会使飞机失去操纵。所以模型假设的时候,我们不需要考虑机头向下的情况。如图3-2。
综上考虑,我们应只考虑机尾向下,机头向上的情景,以一定的角度与水面接触的姿态滑翔。
飞机迫降安全性的相关因子
一般飞机是由几段组成的,所以,考虑飞机迫降时水面对飞机各个部分的冲击载荷,因为各个部件的最大许用力不同,冲击载荷随着速度的不同和姿态角的不同将会用很大的变化,所以我们要的结果,就是得到最佳的姿态角,使得飞机断裂程度最小,进水量最少,漂浮时间最长。最大限度的保障人员安全。
分析方法的选取
因为飞机的许用应力和漂浮时间设计到飞机的材料,材料可以承受的应力等力学知识,所以我们应该选择动力学,流体力学等原理,对飞机迫降时的状态进行分析,以求得飞机最佳的角度。
模型假设:
空气阻力在飞机迫降过程中不考虑
客机以中线为对称轴落下,即机翼连线平行于水面落下
论文缩略图:
全部论文请见下方“ 只会建模 QQ名片” 点击QQ名片即可
部分程序代码:(代码和文档not free)
X=[1,2,3,4];
Y1=[0,2.1,3.8,7.1]*10^6;
Y2=[0.9,1.3,2.0,2.2]*10^6;
Y3=[1.6,4.6,6.2,10.4]*10^6;
Plot(x,y1,x,y2,x,y3);
Hold on
Plot(x,y1,’.’,x,y2,’.’,x,y3,’.’)
全部论文及程序请见下方“ 只会建模 QQ名片” 点击QQ名片即可
这篇关于2011年认证杯SPSSPRO杯数学建模A题(第一阶段)客机水面迫降时的姿态全过程文档及程序的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




