本文主要是介绍LC串联谐振拓扑仿真建模,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
直流高压电源主要应用于高端精密分析仪器、高端医疗分析仪器、静电应用、激光雷达、核探测、惯性导航、雷达通信、电子对抗、高功率脉冲、等离子体推进等行业领域。
LC串联谐振拓扑是直流高压电源中最为常用的拓扑结构。上一期内容中我们对 LC 串联谐振变换器的工作原理进行了分析,今天继续为大家分享 LC 串联谐振变换器的仿真建模及控制策略分析。
根据开关频率 f~ s ~ 与谐振频率 f ~ r ~ 的关系,变换器有三种工作模式,而实际应用时一般工作在 DCM 模式(0< f ~ s ~ < 0.5f ~ r~)。这里我们将对电路参数进行设计,并使用 Simulink 软件搭建LC串联谐振变换器模型,对电路 DCM 模式进行仿真。
一、电路设计
01、电路拓扑设计
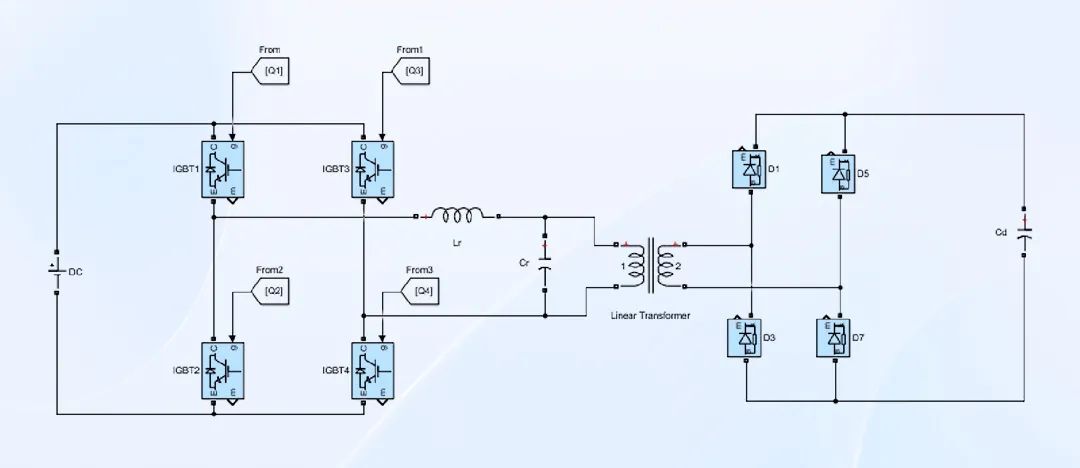
LC 串联谐振拓扑包括: 原边 LC 全桥串联谐振电路、变压器和副边整流电路。
副边电路常用的有全桥整流电路以及倍压整流电路,这里以副边整流采用全桥整流电路为例,电路拓扑结构如图所示:

02、电源技术指标设计
❏**输入电压 ** v~ in~ : 100V(95~105)
❏**充电电压 ** v~ o~ **:**1000V
❏**充电时间 ** t : 1s
❏**负载电容 ** c~ d~ : 500μF
❏**最大工作频率 ** f~ smax~ **:**10kHz
03、器件参数设计
▍变压器变比N设计
V~ omax~
N ~max ~ = ——————
V~ inmin~
V~ omin~
N ~min ~ = ——————
V~ inmax~
这里变压器变比选取 N=10
▍谐振频率设计
电路工作在 DCM 模式下 0<f~ s~<0.5f~ r~,f ~ r ~ = 2f~smax ~= 20kHz
▍谐振电感与谐振电容设计
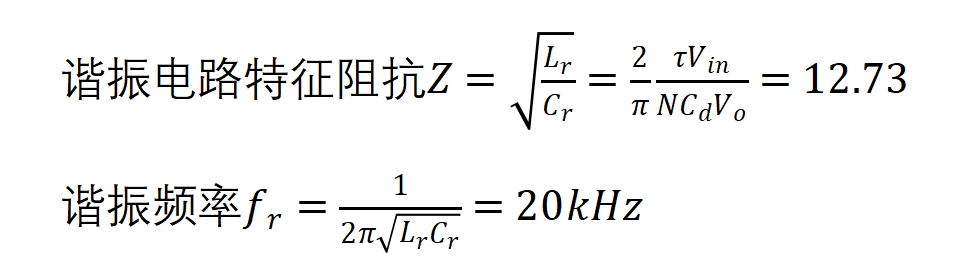
根据上式可以解得 L ~ r~ =1.1mH,C ~ r~ =6.9μF。
二、电路仿真
01、电路模型搭建
目前,电路仿真软件很多,本次我们采用Matlab中的可视化电路仿真软件包 Simulink 进行电路模型搭建。
Simulink 被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。
接下来就让我们一起进行 LC 串联谐振变换器电路模型搭建。
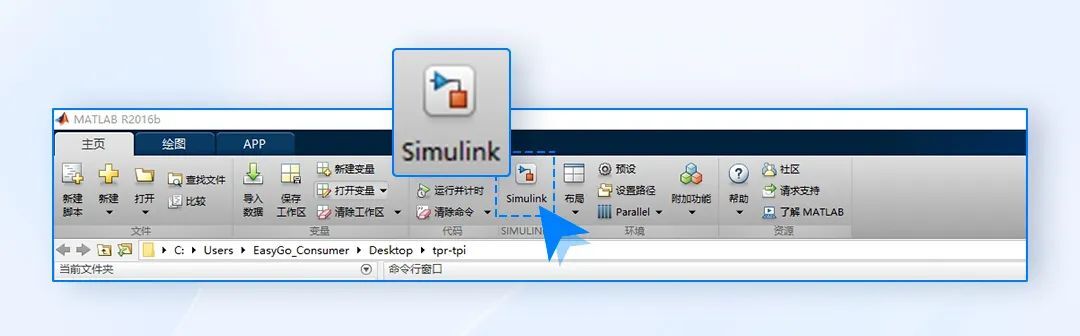
▍启动 Simulink
打开 Matlab 软件,启动 Simulink;
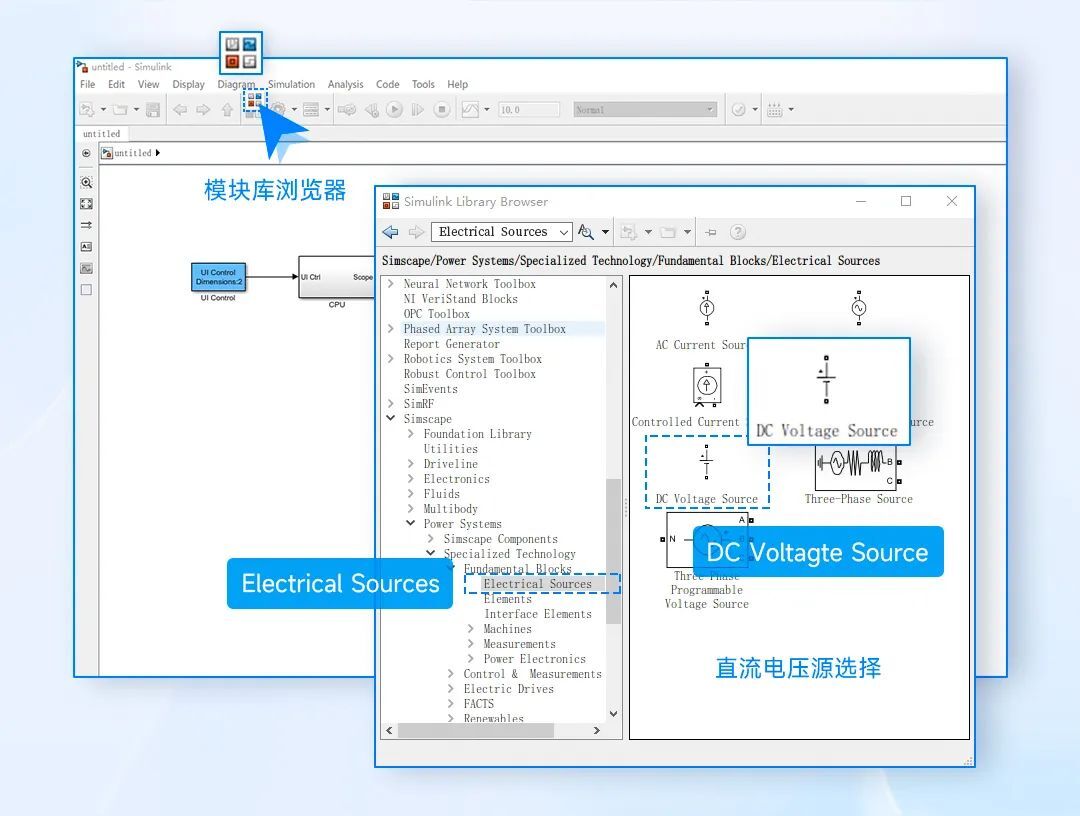
▍模块****器件选择
点击“ 模块库浏览器 ”图标进行器件选择。
以直流电压源为例,搜索“Elec trical Sources”,选择“DC Voltagte Source”,拖拽至模型搭建界面;
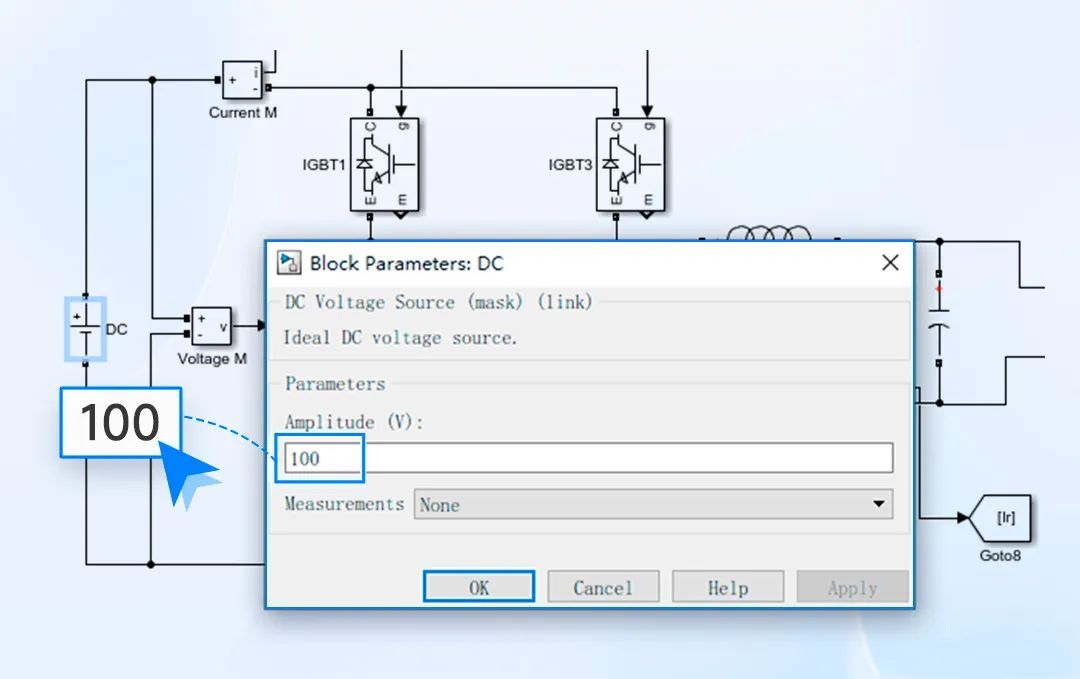
▍参数设置
双击器件进行参数设置。
以直流电压源为例,双击电压源图标会弹出参数设置界面,填入输入额定电压值“100”V即可
▍电路模型
重复上述步骤进行器件选择与参数设置后,按照电路拓扑结构对器件进行连接,得到的LC串联谐振变换器模型如图:
02、开环调试
电路模型搭建完成后,在输入与输出端添加传感器模块,并接入示波器模块中进行波形观察;然后搭建 PWM 波形产生电路并输入至开关器件端。
开环调试电路如图所示:
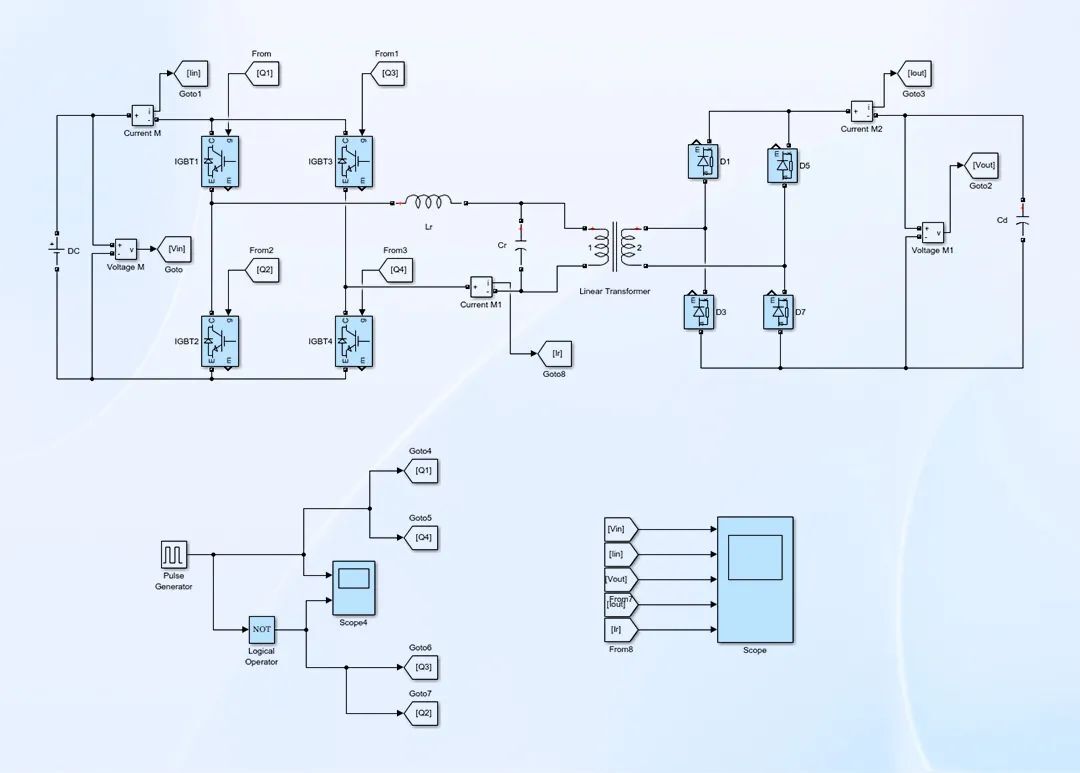
此处 PWM 控制方式为调频控制,通过改变开关频率达到调节输出电压的目的。
首先设置 PWM 开关频率为 1kHz,占空比为40%,可以看到输出电压幅值在1200V左右;然后设置开关频率为 5kHz,可以观察到输出电压为350V左右。
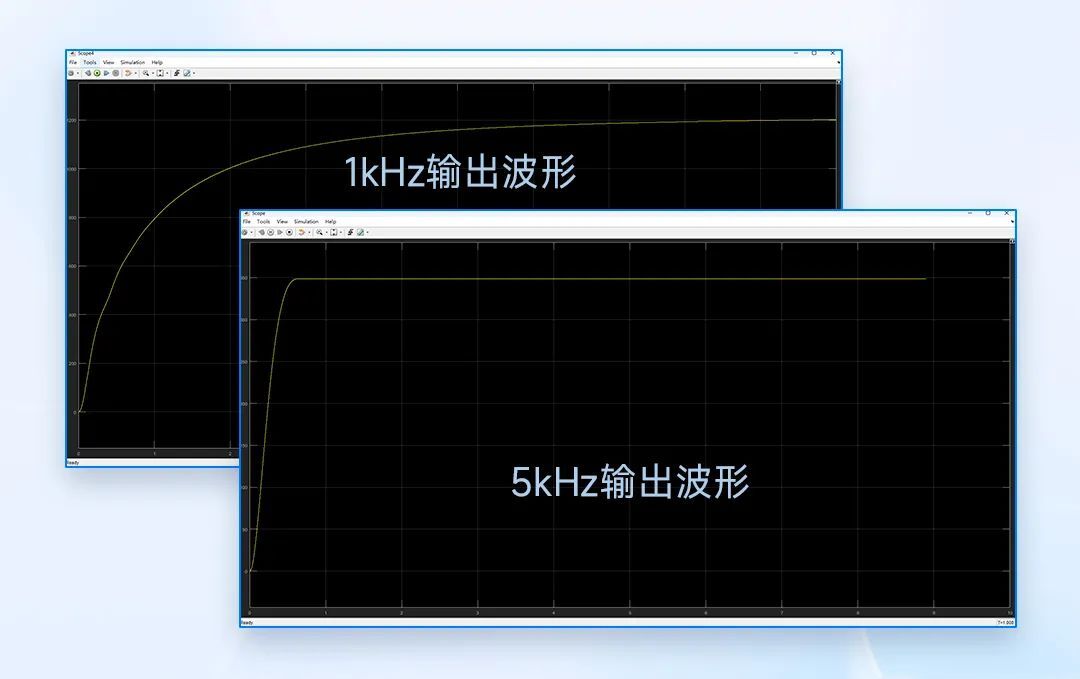
如此,电路输出电压波形符合预期,且可通过改变开关频率实现输出电压调节,符合电路控制规律。
03、闭环调试
这里闭环采用 PI 控制方式,电路设计如图:

点击“运行”按钮进行拓扑电路的闭环调试,点击波形采集窗口可以观察到输出电压波形如图。
这里设置的闭环输出电压为1000V,可以看到输出电压最终稳定在1000V,符合变换器设计要求。

到这里,LC 串联谐振变换器的电路设计与仿真已经完成了,电源的输出基本符合预期。
这篇关于LC串联谐振拓扑仿真建模的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






