本文主要是介绍基于YOLOv8的交通车辆实时检测系统【训练和系统源码+Pyside6+数据集+包运行】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
✨目录
- 一、系统概述和展示🎄
- 1.1 摘要 🎈
- 二、一站式使用教程🎄
- 三、YOLOv8原理剖析🎄
- 3.1 YOLOv8背景和技术原理🎈
- 四、模型训练、评估和推理🎄
- 4.1 数据集介绍🎈
- 4.2 模型训练🎈
- 4.3 结果评估🎈
- 4.4 模型推理🎈
- 五、项目完整目录及获取方式介绍🎄
- 5.1 项目完整目录🎈
- 5.2 项目获取方式🎈
- 5.3 作者介绍🎈
| 项目名称 | 项目名称 | 项目名称 |
|---|---|---|
| 1.口罩佩戴检测系统 | 2.人员抽烟检测系统 | 3.火焰烟雾检测系统 |
一、系统概述和展示🎄
1.1 摘要 🎈
交通车辆实时检测系统利用尖端图像处理技术,对道路情况实施连续监控。旨在提升道路安全,实时识别车辆和违规行为,辅助降低拥堵,保障行车安全,进而改善交通环境管理。本文基于YOLOv8算法框架 ,通过5830张训练图片 (其中5248张训练集,582张验证集),训练出一个可用于检测交通车辆情况的有效检测模型 。此外,为更好地展示算法效果,基于此模型开发了一款带GUI界面的基于YOLOv8的交通车辆实时检测系统,可用于实时检测交通车辆情况,以及时告警。该系统是基于Python和Pyside6开发,并支持以下功能特性:
- 系统背景和标题修改
- 模型权重导入和初始化
- 检测置信度和IOU调节
- 检测目标的信息展示
- 检测用时的统计展示
- 图片导入、检测、结果展示、导出和结束
- 视频导入、检测、结果展示、导出和结束
- 摄像头导入、检测、结果展示、导出和结束


- 用户可通过点击更换背景,选择想要更换背景的图片,系统便会自动更换壁纸;
- 用户可通过点击更换标题,然后在文字输入栏中输入想要更换的标题,然后点击确定,即可更改系统标题。

- 用户可通过点击模型选择,选择想要加载的系统模型;然后点击权重初始化即可完成模型的准备工作。

- 用户可通过点击图片中的选择,选择想要加载的图片文件;然后点击检测,等待弹出图片检测完成的提示框,再点击展示即可将对应的目标框展示在原始图片上,完成展示后,用户可手动点击导出将图片保存到指定位置,最后点击结束关闭图片展示区域。
- 相关展示信息,如耗时、检测目标数量、位置信息等可在检测信息一栏查看。

- 用户可通过点击图片中的选择,选择想要加载的图片文件;然后点击检测,等待弹出图片检测完成的提示框,再点击展示即可将对应的目标框展示在原始图片上,完成展示后,用户可手动点击导出将图片保存到指定位置,最后点击结束关闭图片展示区域。
- 相关展示信息,如耗时、检测目标数量、位置信息等可在检测信息一栏查看。
- 对于摄像头检测模块和视频检测模块原理类似。
- 注意:摄像头检测会自动调用电脑摄像头来进行检测任务。

二、一站式使用教程🎄
第一步:安装Anaconda Prompt、Pycharm(或者vscode),参考:anaconda点击 pycharm点击
第二步:创建python环境
conda create -n YOLOv8_My python=3.8.1
第三步:激活环境
conda activate YOLOv8_My
第四步:安装ultralytics和pytorch
pip install torch==1.13.1+cu116 torchvision==0.14.1+cu116 torchaudio==0.13.1 --extra-index-url https://download.pytorch.org/whl/cu116 -i https://pypi.tuna.tsinghua.edu.cn/simple/
pip install ultralytics==8.1.3 -i https://pypi.tuna.tsinghua.edu.cn/simple
第五步:安装图形化界面库
pip install pyside6==6.6.1 -i https://pypi.tuna.tsinghua.edu.cn/simple
第六步:打开系统界面
python base_camera.py
注意:此环境可同时满足YOLOv8的训练以及系统的运行
三、YOLOv8原理剖析🎄
3.1 YOLOv8背景和技术原理🎈
权重链接: 点击
项目地址: 点击
论文地址:(目前还在火速撰写中)
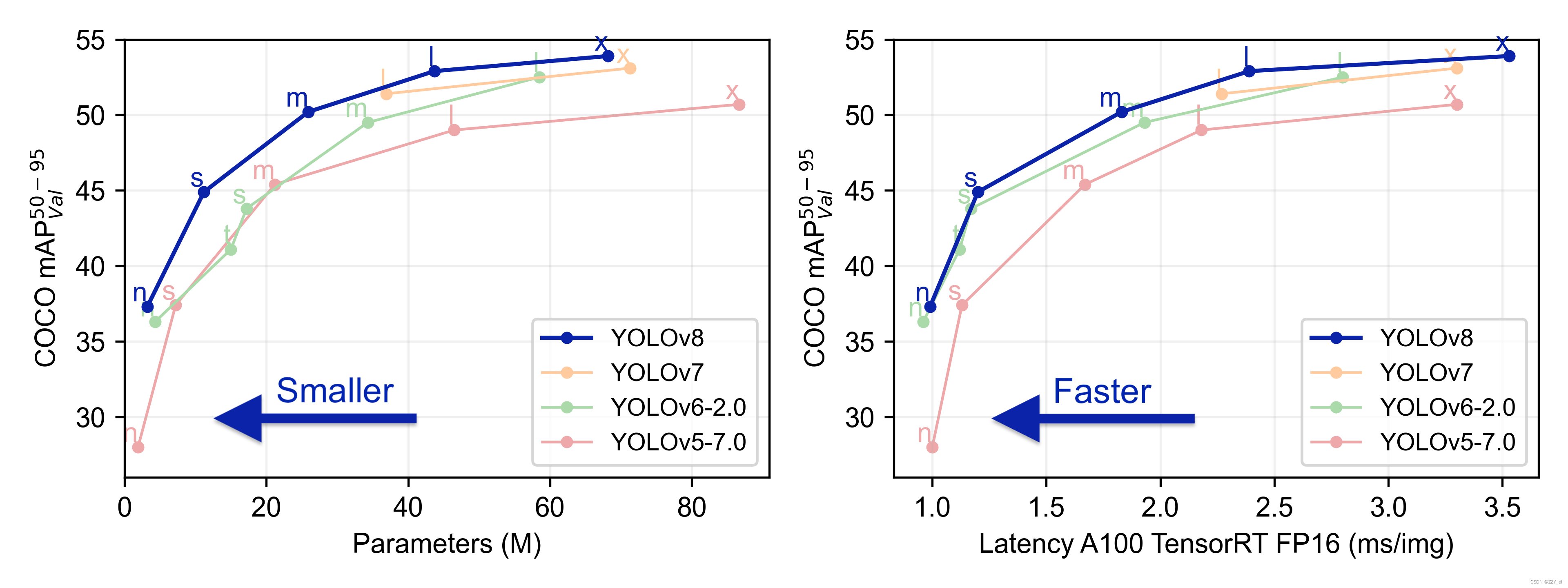
YOLOv8是Ultralytics团队基于先前成功的YOLO系列模型推出的最新版本,适用于目标检测、分割、分类任务,以及处理大规模数据集的学习。这个模型不仅能够在多种硬件设备上运行,包括CPU和GPU,而且设计上追求快速、准确且用户友好。YOLOv8引入了一系列创新,包括新的骨干网络、无锚点(Ancher-Free)检测头和损失函数,旨在提升性能和灵活性。此外,该模型支持与早期YOLO版本的兼容,便于用户根据需求切换和比较不同版本。YOLOv8提供了五个不同规模的预训练模型,从n到x,每个模型在参数数量和精度之间取得了不同的平衡,其中较大的模型l和x在减少参数的同时显著提升了精度✅
YOLOv5架构特点:
- Backbone:YOLOv5使用CSPDarknet作为主干网络,它是一种轻量级的Darknet架构,具有更高的速度和更好的性能。
- PAN/FPN:YOLOv5使用PAN(Path Aggregation Network)来融合不同尺度的特征图,以提高检测性能。
- Head:YOLOv5的检测头部由多个卷积层组成,用于预测目标的边界框和类别。
- 样本分配策略:YOLOv5使用IoU阈值来分配正负样本,以平衡正负样本的数量。
- Loss:包含分类损失(BCEWithLogitsLoss)、定位损失(BCEWithLogitsLoss)、置信度损失(GIOU)。

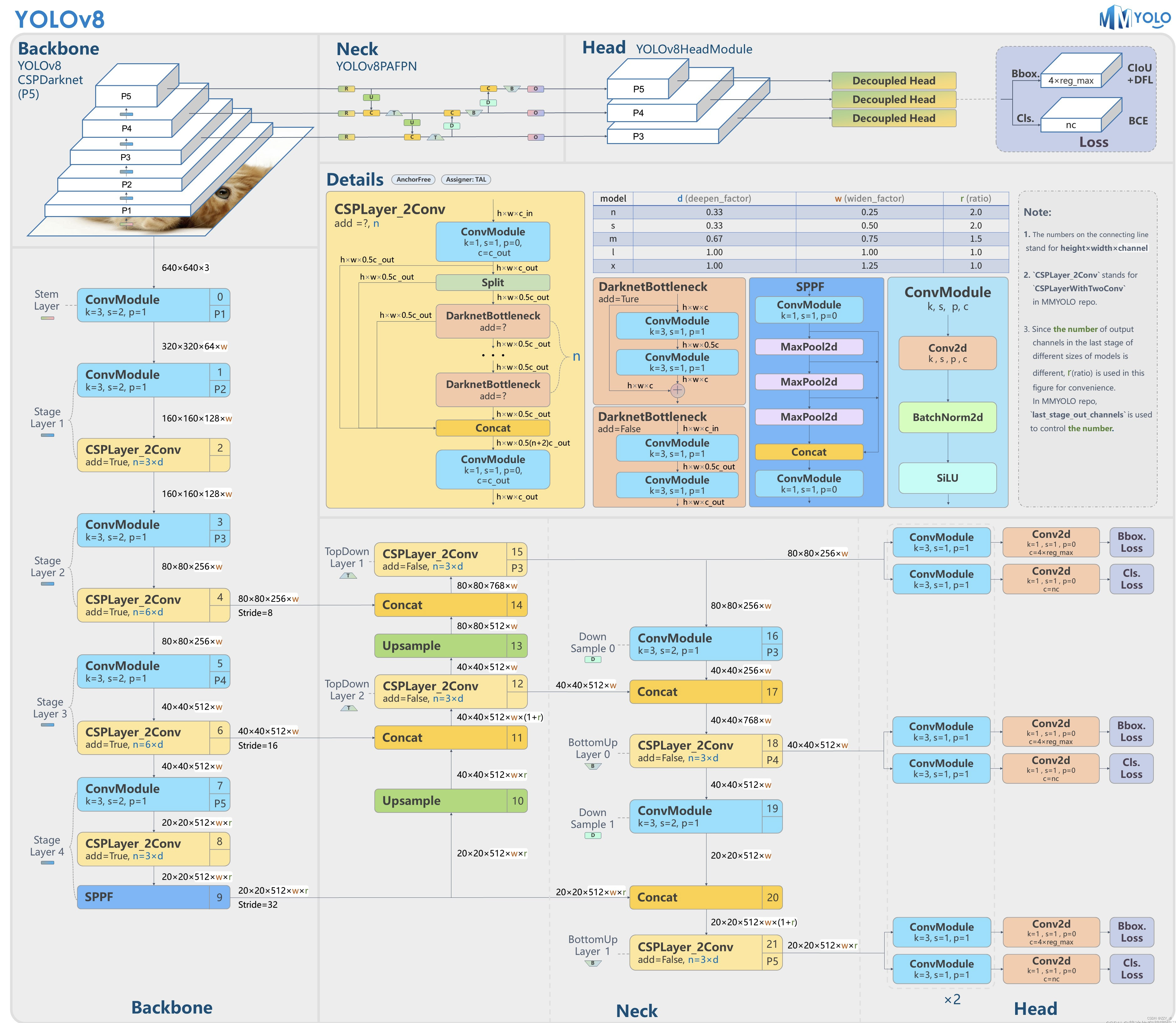
YOLOv8架构特点:
- Backbone:
- 相同:CSP的思想(/梯度分流);并且使用SPPF模块
- 不同:将C3模块替换为C2f模块
- PAN/FPN:
- 相同:PAN的思想
- 不同:删除了YOLOv5中PAN-FPN上采样的CBS 1*1,将C3模块替换为C2f模块
- Head:Decoupled head + Anchor-free
- 样本分配策略:采用了TAL(Task Alignment Learning)动态匹配
- Loss:
- 相同:分类损失依然采用 BCE Los
- 不同:1)舍去物体的置信度损失;2)回归分支loss: CIOU loss+Distribution Focal Loss
两者推理过程的区别:在推理过程中,YOLOv5和YOLOv8的主要差异在于coupled head和decoupled head的使用。coupled head是YOLOv5中的一种推理方式,它将Distribution Focal Loss中的积分表示bbox形式进行解码,变成常规的4维度bbox,然后进行后续计算。而decoupled head是YOLOv8中的一种推理方式,它直接使用Distribution Focal Loss中的积分表示bbox形式进行计算,不需要解码过程。
总结起来,YOLOv5和YOLOv8在架构和推理过程上有一些差异,包括主干网络、特征融合、检测头部、正负样本分配策略和损失函数等方面的差异。其中,在推理过程中,YOLOv5使用coupled head进行bbox解码,而YOLOv8使用decoupled head直接计算积分表示bbox。
四、模型训练、评估和推理🎄
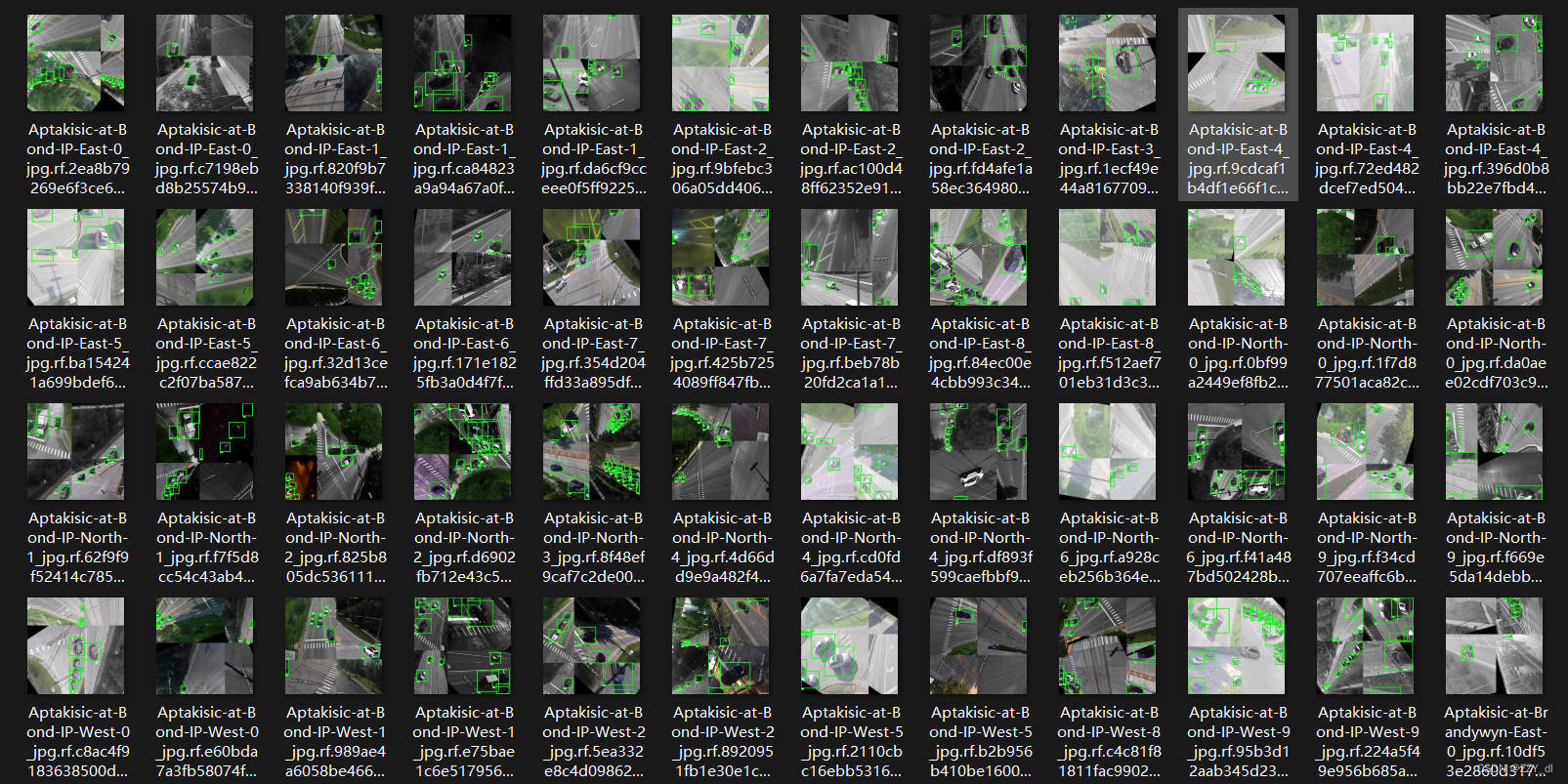
4.1 数据集介绍🎈
本文使用的是交通车辆数据集,该数据集来自美国伊利诺伊州芝加哥市的交通监控摄像头所捕获的图片集合,这些图片经过随机增强处理后进行了融合。包含5830张训练图片,类别为[car],本文实验训练集5248张,验证集582张。部分数据集及标注可视化信息如下:
图片数据集的存放格式如下,在项目目录中新建datasets目录,同时将YOLO格式数据集images和labels放入指定目录下,然后修改”yolov8\my_file\object_detection\dataset_cfg”下的smoke.yaml文件中的path路径指向datasets文件夹(绝对路径)。
datasets:
- images- train(此文件夹全是图片)- val(此文件夹全是图片)- labels- train(此文件夹全是txt文件)- val(此文件夹全是txt文件)
4.2 模型训练🎈
数据准备完成后,通过调用detection_train.py文件进行模型训练,data参数用于加载数据集的配置文件,epochs参数用于调整训练的轮数,workers参数用于调整系统的并发能力,batch参数用于调整训练的批次大小【根据内存大小调整,最小为1】,代码如下:
import os
from ultralytics import YOLO
current_path = os.path.dirname(os.path.realpath(__file__))
root_path = os.path.abspath(os.path.join(current_path, "../..")) + "/"
# Load a mode
model = YOLO(root_path + 'ultralytics/cfg/models/v8/yolov8s.yaml').load(root_path + 'weights/det/yolov8s.pt') if __name__ == '__main__':results = model.train(data=root_path + 'my_file/object_detection/dataset_cfg/car.yaml', epochs=100, imgsz=416, batch=32, workers=16, lr0=0.01, amp=False, project=root_path+"runs/det")
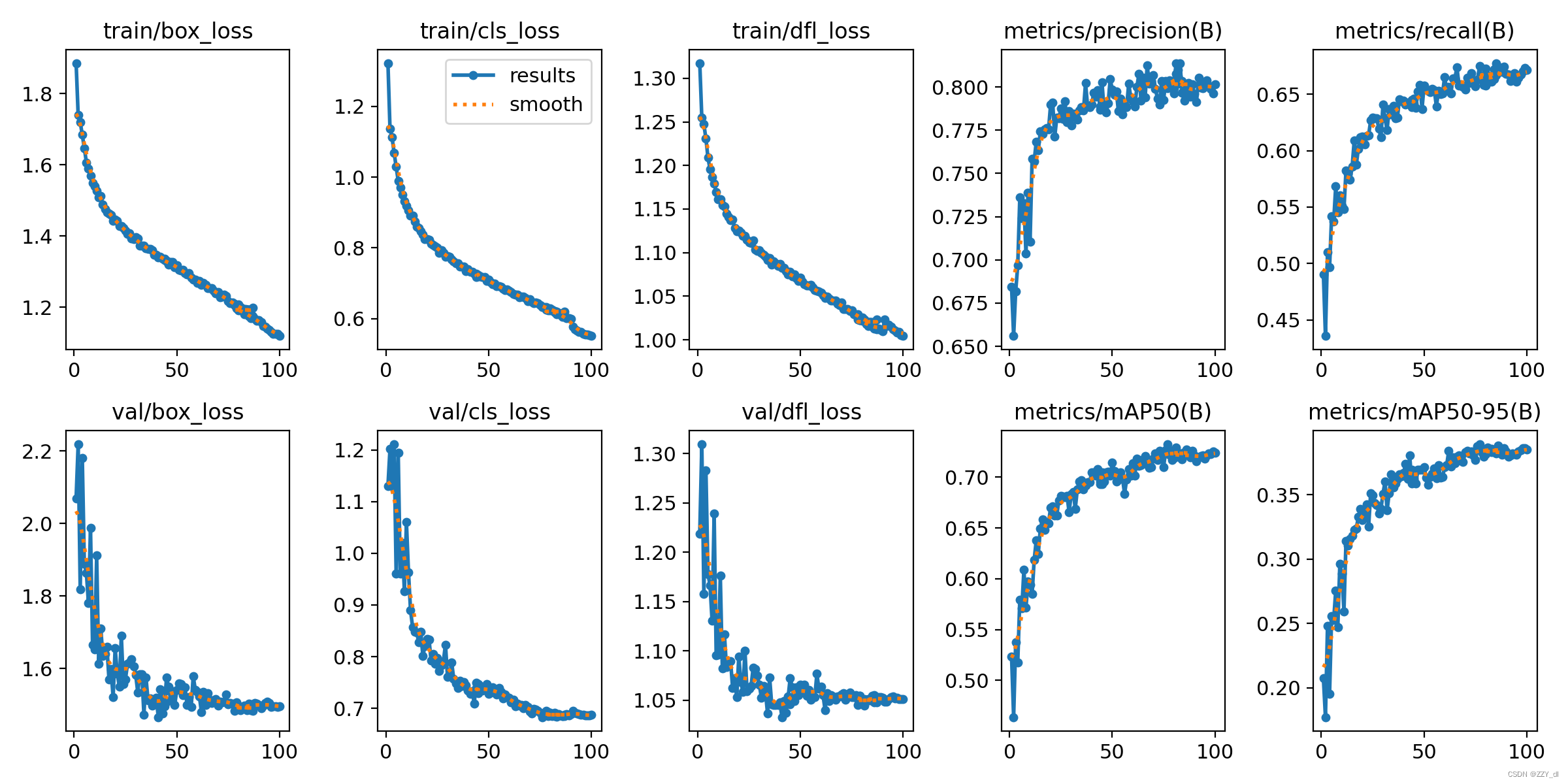
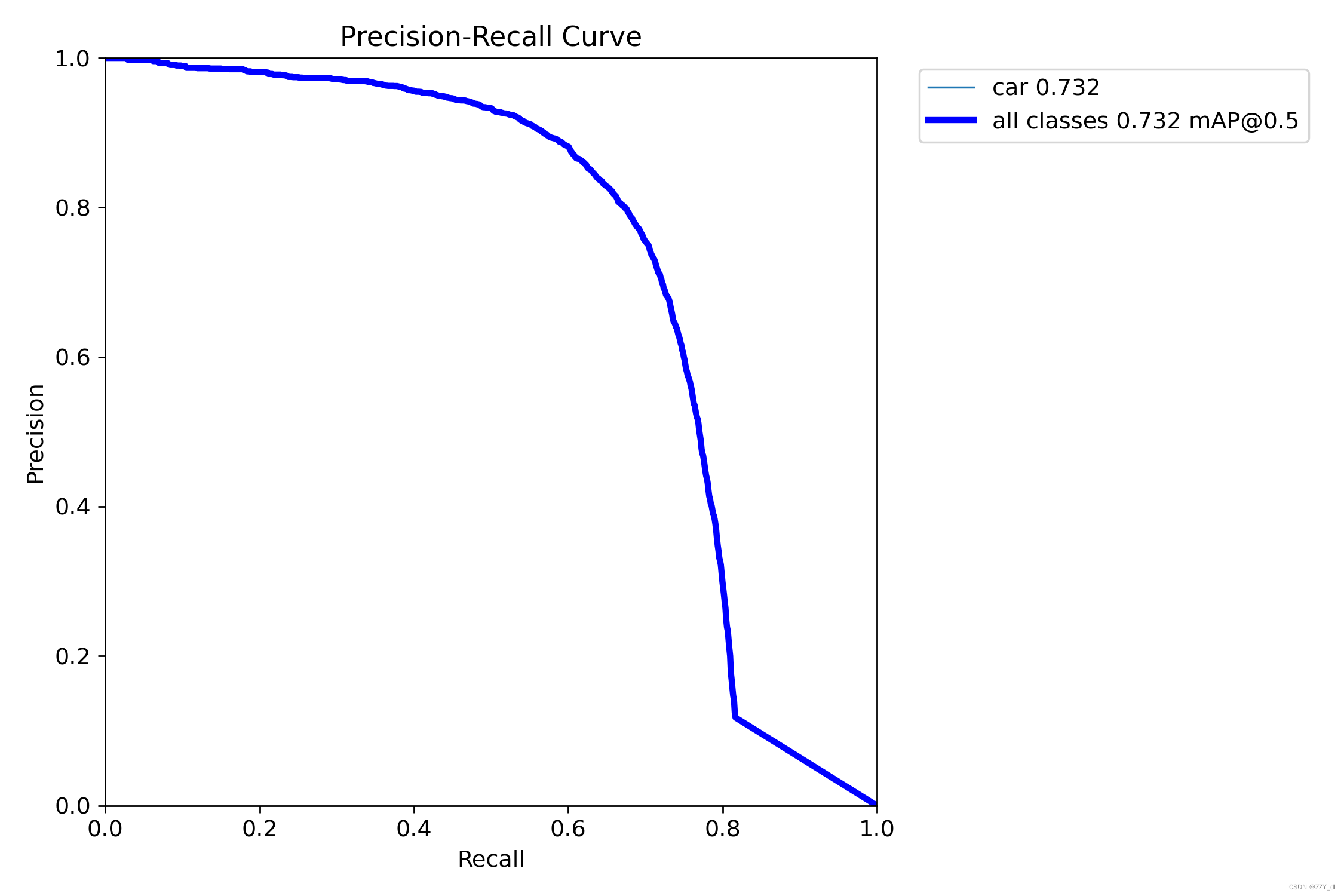
4.3 结果评估🎈
在深度学习中,我们通常用损失函数下降的曲线来观察模型训练的情况,避免过拟合和欠拟合现象。YOLOv8训练过程及结果文件保存在runs/det/目录下,我们可以在训练结束后进行查看,结果如下所示:
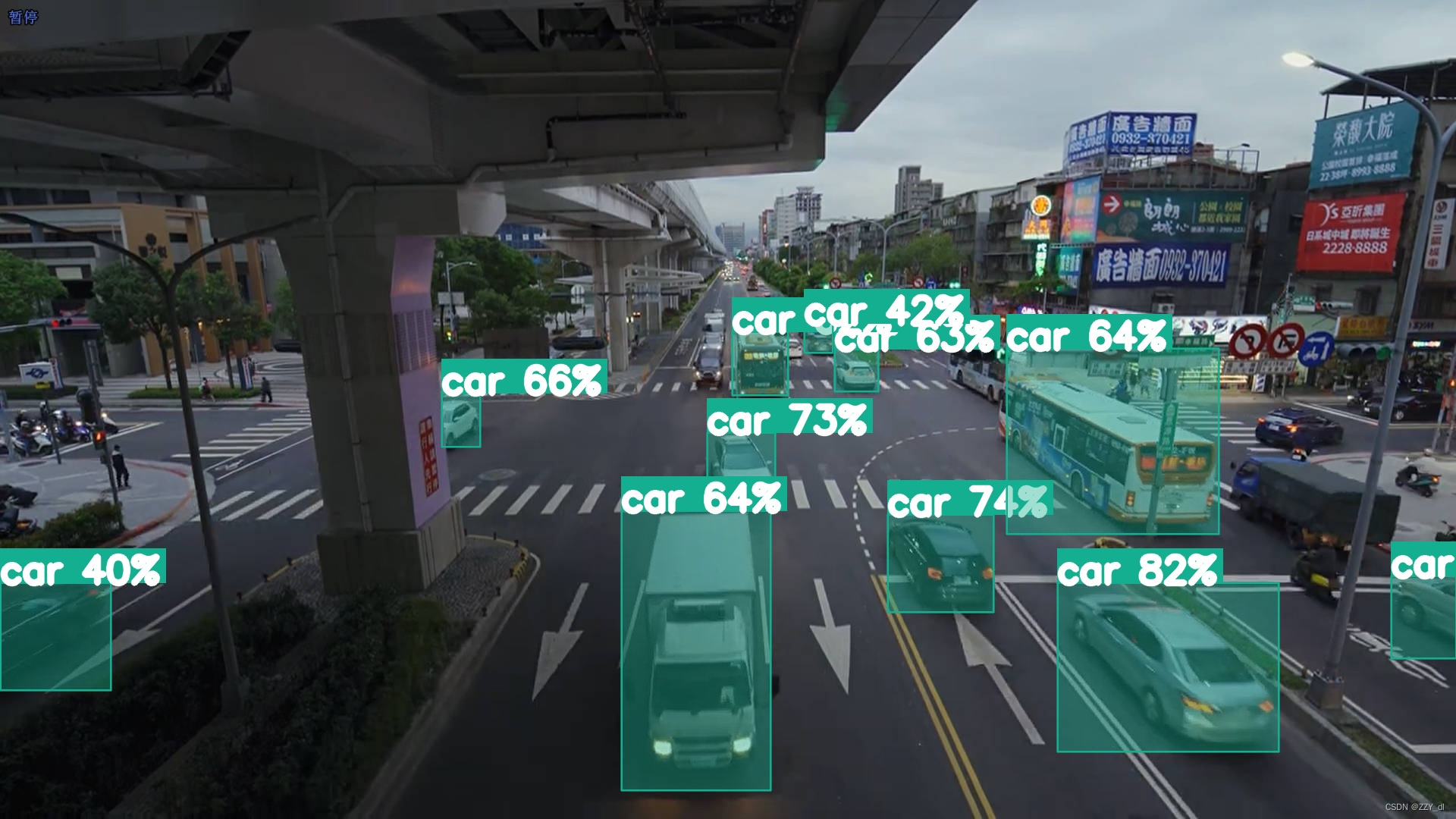
4.4 模型推理🎈
模型训练结束后,我们可在runs/det/目录下可以得到一个最新且最佳的训练结果模型best.pt文件,在runs/det/train/weights目录下。我们可使用该文件进行后续的推理检测。
import os
from ultralytics import YOLO
current_path = os.path.dirname(os.path.realpath(__file__))
root_path = os.path.abspath(os.path.join(current_path, "../.."))+"/"
model = YOLO(root_path + 'runs/det/train/weights/best.pt') # load a custom trained# Export the model
if __name__ == '__main__':# 可自行选择想要检测的图片,如这里的bus.jpgmodel.predict(root_path + 'ultralytics/assets/car.jpg', save=True, imgsz=416, conf=0.5)
五、项目完整目录及获取方式介绍🎄
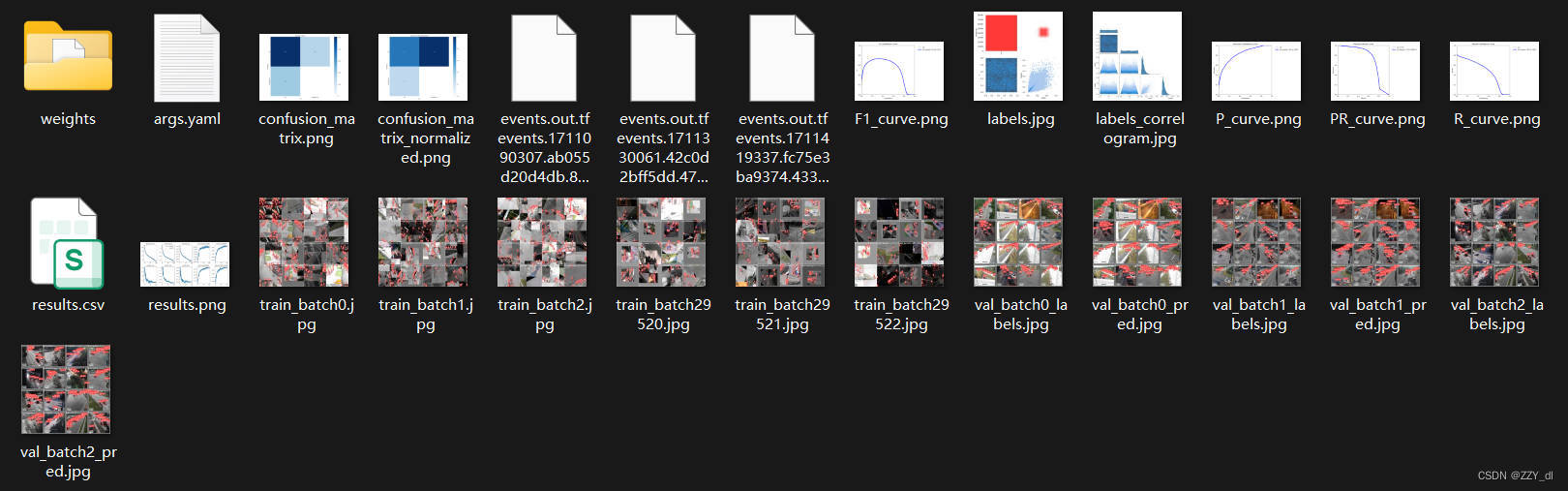
5.1 项目完整目录🎈
本文涉及到的完整的程序文件:包括环境配置文档说明(训练和系统环境都适用)、模型训练源码、数据集、系统完整代码、系统UI文件、测试图片视频等,获取方式见文末。


5.2 项目获取方式🎈
面包多获取链接:https://mbd.pub/o/bread/mbd-ZZ2amZlt
5.3 作者介绍🎈
哈喽大家好, AI应用视界工作室致力于深入探索人工智能算法与应用开发的交互,涵盖目标分类、检测、分割、跟踪、人脸识别等关键领域,以及系统架构的创新设计与实现。我们的目标是为广大人工智能研究者提供一个丰富、权威的参考资源,同时也期待与您共同交流,推动人工智能技术的进步。如有相关算法交流学习和技术需求,请关注下方公众号(或者搜索 AI-designer66)可与我们取得联系。

这篇关于基于YOLOv8的交通车辆实时检测系统【训练和系统源码+Pyside6+数据集+包运行】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





