本文主要是介绍CVPR2023 | 一种不需要点聚类的新颖点云实例分割算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
作者:PCIPG-HAY | 来源:3D视觉工坊
在公众号「3D视觉工坊」后台,回复「原论文」可获取论文pdf和代码链接
添加微信:dddvisiona,备注:3D点云,拉你入群。文末附行业细分群
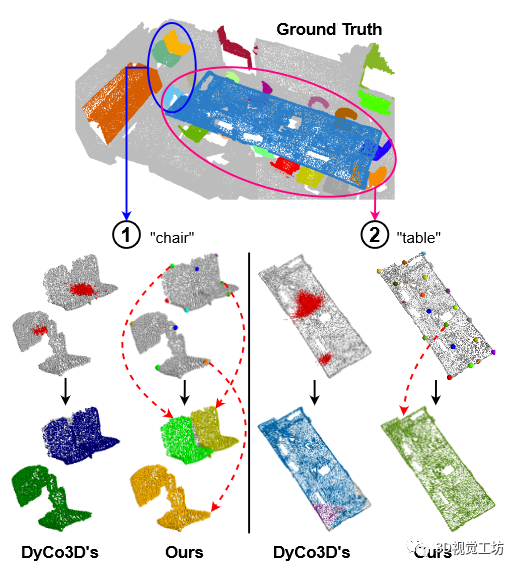
现有的 3D 实例分割方法以自下而上的设计为主——手动微调算法将点分组为簇,然后是细化网络。然而,由于依赖于聚类的质量,当(1)具有相同语义类的附近对象被打包在一起,或(2)具有松散连接区域的大型对象时,这些方法会产生容易受到影响的结果。为了解决这些限制,我们引入了 ISBNet,这是一种新颖的cluster-free方法,它将实例表示为内核并通过动态卷积解码实例掩码。为了有效地生成高召回率和判别力的内核,我们提出了一种名为“实例感知最远点采样”的简单策略来对候选进行采样,并利用受 PointNet++ 启发的本地聚合层对候选特征进行编码。此外,我们还表明,在动态卷积中预测和利用 3D 轴对齐边界框可以进一步提高性能。我们的方法在 ScanNetV2 (55.9)、S3DIS (60.8) 和 STPLS3D (49.2) 上的 AP 上设置了新的最先进结果,并保留了快速推理时间(ScanNetV2 上每个场景 2
这篇关于CVPR2023 | 一种不需要点聚类的新颖点云实例分割算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







