本文主要是介绍虹科Pico汽车示波器 | 免拆诊断案例 | 2019 款东风悦达起亚K2车怠速起停系统工作异常,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、故障现象
一辆2019款东风悦达起亚K2车,搭载G4FG发动机,累计行驶里程约为9 400 km。车主反映,行驶至路口停车等红灯时,怠速起停(ISG)系统自动使发动机熄火,接着组合仪表提示“怠速起停已解除请起动发动机”(图1),同时蓄电池警告灯和机油压力警告灯点亮;松开制动踏板,发动机无法自动起动,但可以使用车钥匙起动。

图1 组合仪表上的提示信息
二、故障诊断
接车后路试,组合仪表上的绿色起停标志指示灯点亮,持续约2s后熄灭,异常(正常情况下应持续点亮);踩下制动踏板,车辆减速至停止时发动机自动熄火,松开制动踏板,发动机无法自动起动;使用车钥匙起动发动机,按下ISG OFF开关 ,强制关闭ISG系统;再次路试,停车时发动机不再自动熄火,说明发动机自动熄火确实与ISG系统工作有关。
用故障检测仪(KDS)检测,发现自动变速器系统中存储有故障代码“P1C2800 OPI电流高(尚待解决)”(图2)。

图2 自动变速器系统中存储的故障代码
查看维修手册得知,故障代码P1C2800与自动变速器的油泵系统有关。该车自动变速器配有2个油泵,一个是常规的机械油泵,发动机工作时,自动变速器的油压主要由发动机驱动机械油泵提供;另一个是电动油泵(EOP),发动机自动熄火期间机械油泵停止工作,无法产生足够的油压,此时电动油泵工作,向低速挡制动器(UD/B)提供油压,并保持压力在一定范围,防止松开制动踏板,ISG系统自动起动发动机后,车辆D1挡起步时产生冲击或起步延迟。
如图3所示,电动油泵为三相无刷直流电动机,由电动油泵逆变器驱动。

图3 电动油泵控制电路
当ISG系统使发动机自动熄火时,动力控制模块(PCM,集成了发动机控制模块和自动变速器控制模块)通过C-CAN总线输出电动油泵的目标转速指令到电动油泵逆变器,由电动油泵逆变器驱动电动油泵,实现持续提供油压及保压,同时通过霍尔位置传感器监控电动油泵转速,进行闭环监控,使电动油泵实际转速接近目标转速。
从自动变速器系统中读取与电动油泵相关的数据流(图4),“TCU ISG 状态(ISG)”为ON,“OPI目标转速(ISG)”为1 200 r/min,“OPI当前转速(ISG)”为0 r/min,说明电动油泵请求信号正常,但实际电动油泵未工作。

图4 故障车与电动油泵相关的数据流
脱开电动油泵逆变器导线连接器E37-A,测量供电和搭铁,均正常;从导线连接器E37-A端子1、端子2及端子5处分别测量两相之间的电阻,均为0.3 Ω,说明电动油泵线圈不存在断路;接着分别测量三相导线与搭铁之间的电阻,均为∞,说明三相导线均未对搭铁短路。为了快速判断是电动油泵损坏,还是控制方面异常,用pico示波器同时测量电动油泵的三相控制信号波形,反复试车发现,三相控制信号中的U相和V相的控制信号波形均会从3.6 V左右下拉至0 V(图5和图6)

图5 U相控制信号异常

图6 V相控制信号异常
这一下拉持续约5 s,然后电动油泵逆变器进入失效保护模式,停止输出控制信号;放大三相控制信号波形(图7),可以发现三相控制信号均异常,由此推断电动油泵逆变器损坏(图8)。
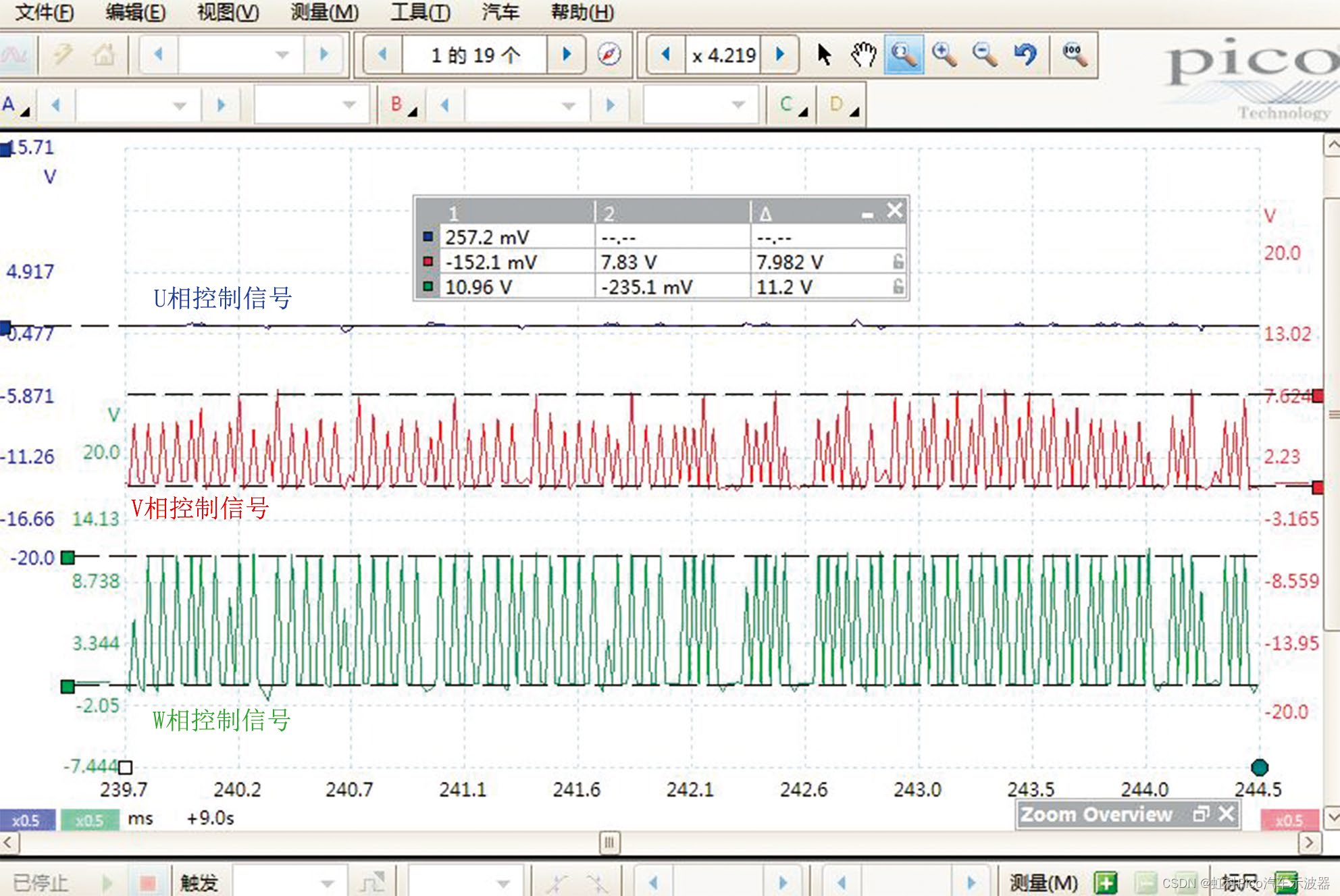
图7 放大故障车的三相控制信号波形

图8 损坏的电动油泵逆变器
三、故障排除
更换电动油泵逆变器后路试,ISG系统使发动机自动熄火后,读取与电动油泵相关的数据流(图9),电动油泵实际转速为1 280 r/min,目标转速为1260 r/min,基本一致
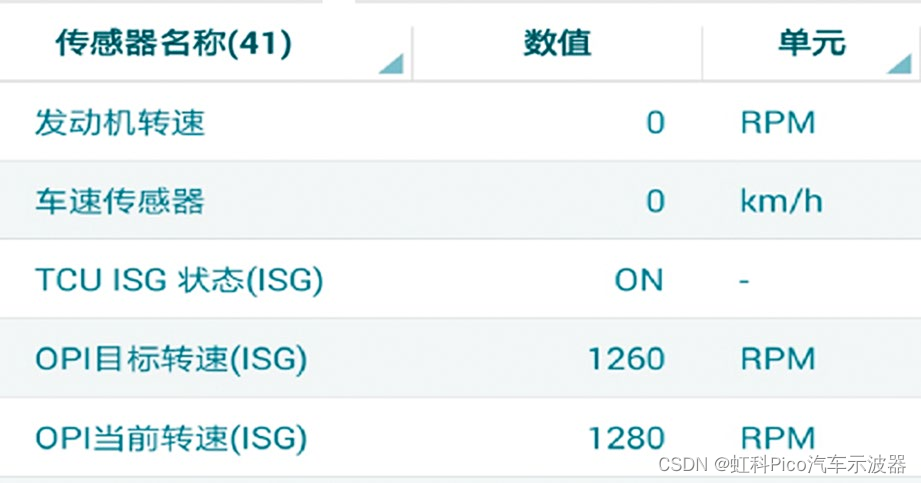
图9 正常车与电动油泵相关的数据流
再次测量电动油泵的三相控制信号波形(图10),整体来看,三相控制信号相似且同步
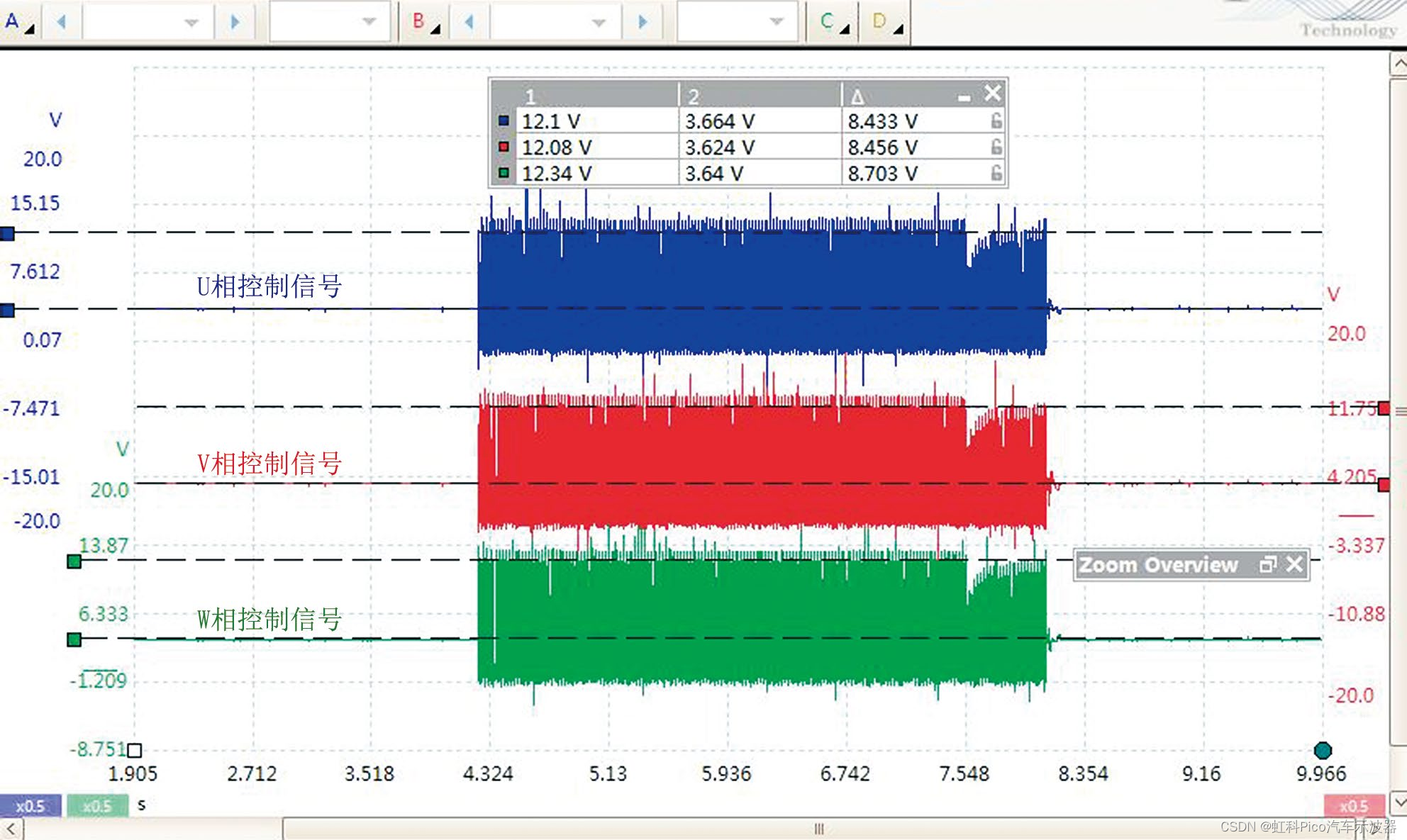
图10 正常车电动油泵的三相控制信号波形
放大波形(图11)观察,发现三相控制信号均恢复正常;松开制动踏板,发动机自动起动着机,ISG系统功能恢复正常,故障排除。
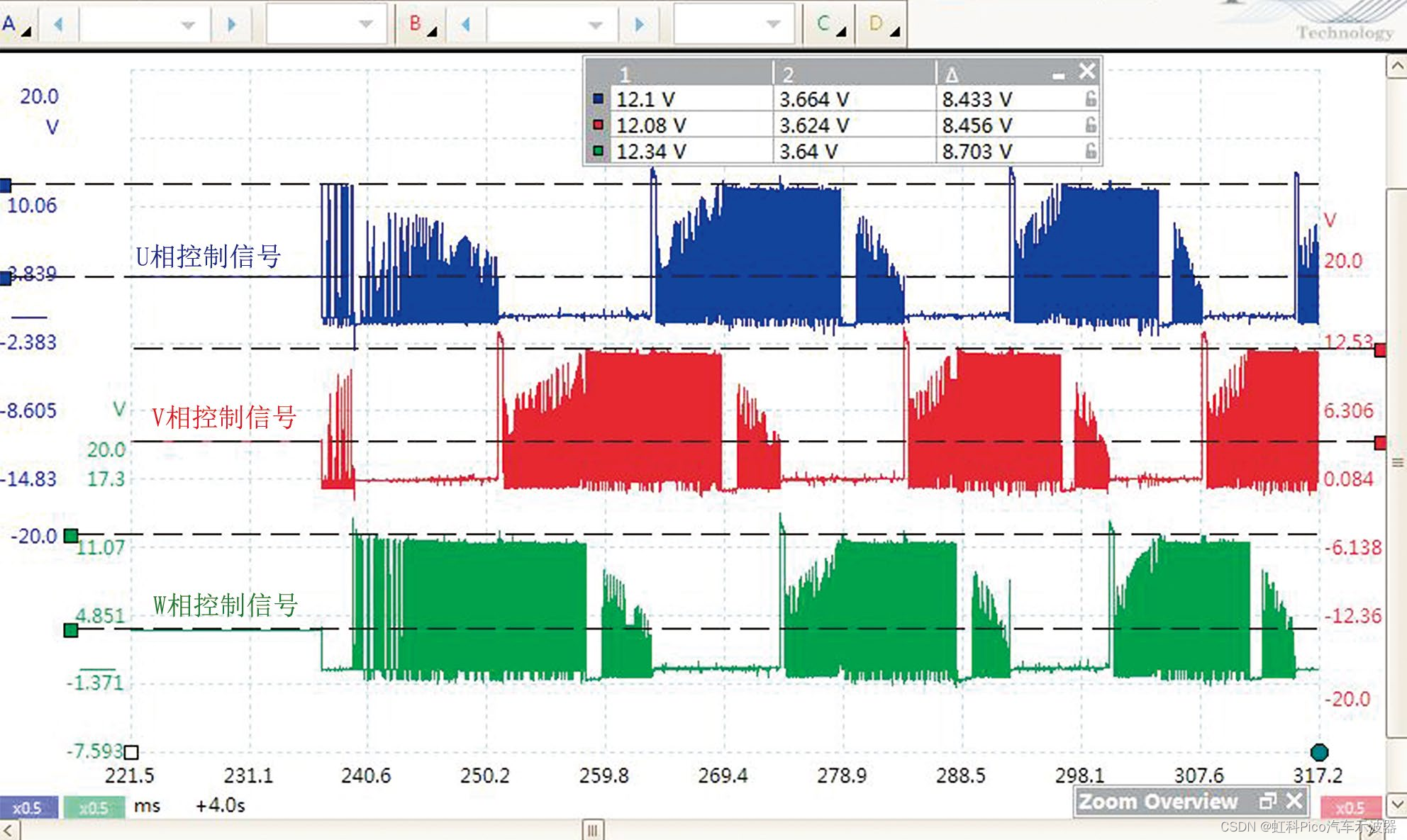
图11 放大正常车的三相控制信号波形
四、故障总结
该车的故障是由于电动油泵逆变器损坏导致的怠速起停系统异常,经过电阻测试发现不存在短路现象后,通过Pico示波器对电动油泵的三相控制信号波形进行测试,并发现U相和V相控制信号存在异常,由此将故障源头精准定位到电动油泵逆变器,快速完成了故障判断和维修!
作者:广西普鑫泽源汽车销售服务有限公司 李康林
这篇关于虹科Pico汽车示波器 | 免拆诊断案例 | 2019 款东风悦达起亚K2车怠速起停系统工作异常的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



