本文主要是介绍【Android】SLAM:ORB-SLAM 位姿优化,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
只知道算法描述和代码,而不知道原理是比较扯的事情,还是把原理转载一下。原文链接:http://www.cnblogs.com/luyb/p/5447497.html
ORB-SLAM作为单目SLAM,其精度很大程度上决定于帧与帧之间的位姿优化的是否准确。因此优化(optimization)在ORB-SLAM里面扮演了很重要的角色。这一小节探讨一下ORB-SLAM里用到的优化。
ORB-SLAM选用g2o作为图优化的方法,关于g2o可以参考http://www.cnblogs.com/gaoxiang12/p/5304272.html。
一、为什么要优化
因为摄像机标定(camera calibration)和追踪(tracking)的精度不够。摄像机标定的误差会体现在重建中(比如三角法重建时),而追踪的误差则会体现在不同关键帧之间的位姿中,和重建中(单目)。误差的不断累积会导致后面帧的位姿离实际位姿越来越远,最终会限制系统整体的精度。
1.1 摄像机标定
单目SLAM文献中一般假设摄像机标定的结果是准确的,并不考虑这个因素带来的误差(大概因为很多时候跑标准的数据集,认为摄像机标定的误差是相似的)。然而对于一个产品,不同类型的传感器对应的标定误差并不相同,甚至有可能差异很大。因此,如果要评估整个系统的精度,这方面的误差必须要考虑进去。
1.2 追踪
无论在单目、双目还是RGBD中,追踪得到的位姿都是有误差的。单目SLAM中,如果两帧之间有足够的对应点,那么既可以直接得到两帧之间的位姿(像初始化中那样),也可以通过求解一个优化问题得到(如solvePnP)。由于单目中尺度的不确定性,还会引入尺度的误差。由于tracking得到的总是相对位姿,前面某一帧的误差会一直传递到后面去,导致tracking到最后位姿误差有可能非常大。为了提高tracking的精度,可以1. 在局部和全局优化位姿;2. 利用闭环检测(loop closure)来优化位姿。
二、如何优化
2.1 优化的目标函数在SLAM问题中,常见的几种约束条件为:
1. 三维点到二维特征的映射关系(通过投影矩阵);
2. 位姿和位姿之间的变换关系(通过三维刚体变换);
3. 二维特征到二维特征的匹配关系(通过F矩阵);
4. 4呢?
5. 其它关系(比如单目中有相似变换关系)。如果我们能够知道其中的某些关系是准确的,那么可以在g2o中定义这样的关系及其对应的残差,通过不断迭代优化位姿来逐步减小残差和,从而达到优化位姿的目标。
2.2 局部优化
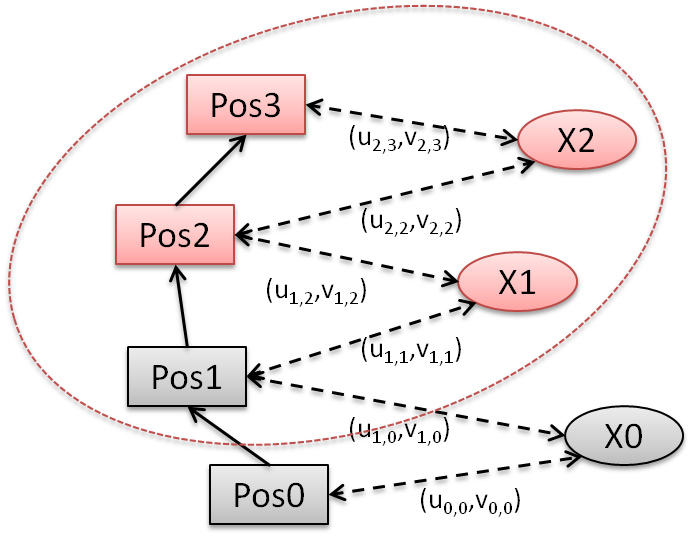
当新的关键帧加入到convisibility graph时,作者在关键帧附近进行一次局部优化,如下图所示。Pos3是新加入的关键帧,其初始估计位姿已经得到。此时,Pos2是和Pos3相连的关键帧,X2是Pos3看到的三维点,X1是Pos2看到的三维点,这些都属于局部信息,共同参与Bundle Adjustment。同时,Pos1也可以看到X1,但它和Pos3没有直接的联系,属于Pos3关联的局部信息,参与Bundle Adjustment,但取值保持不变。Pos0和X0不参与Bundle Adjustment。
因此,参与优化的是下图中红色椭圆圈出的部分,其中红色代表取值会被优化,灰色代表取值保持不变。(u,v)是X在Pos下的二维投影点,即X在Pos下的测量(measurement)。优化的目标是让投影误差最小。
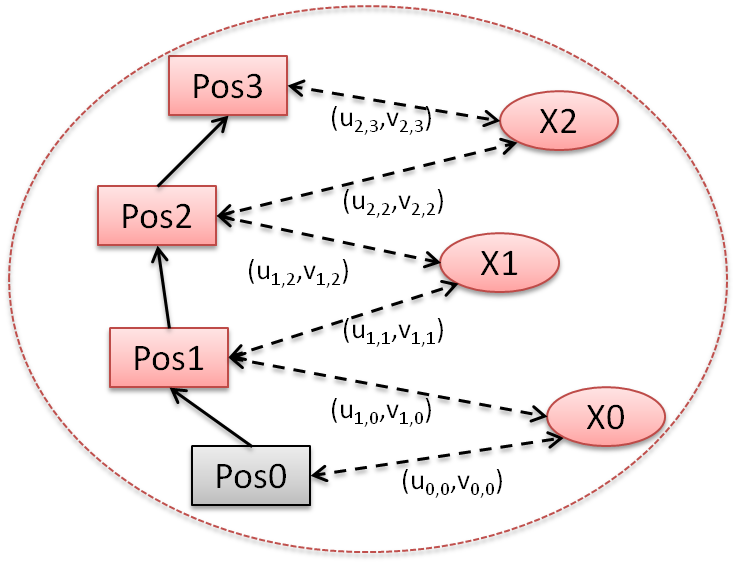
2.3 全局优化
在全局优化中,所有的关键帧(除了第一帧)和三维点都参与优化。
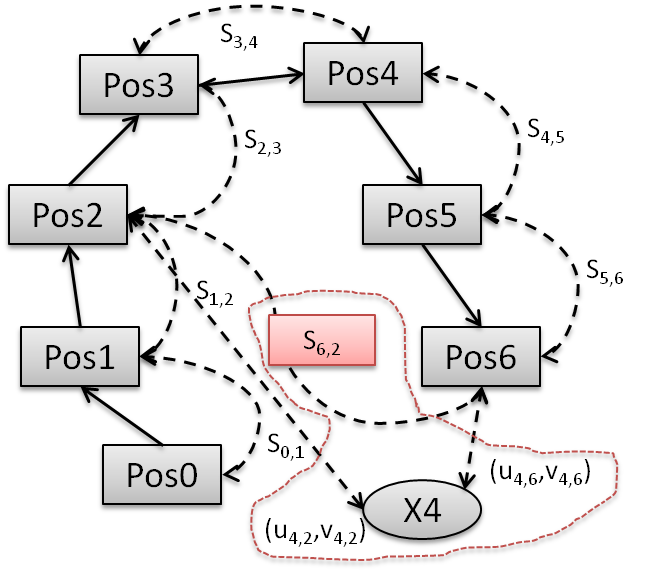
2.4 闭环处的Sim3位姿优化
当检测到闭环时,闭环连接的两个关键帧的位姿需要通过Sim3优化(以使得其尺度一致)。优化求解两帧之间的相似变换矩阵,使得二维对应点(feature)的投影误差最小。
如下图所示,Pos6和Pos2为一个可能的闭环。通过(u 4,2 ,v 4,2 ) (u4,2,v4,2)和(u 4,6 ,v 4,6 ) (u4,6,v4,6)之间的投影误差来优化S 6,2 S6,2。
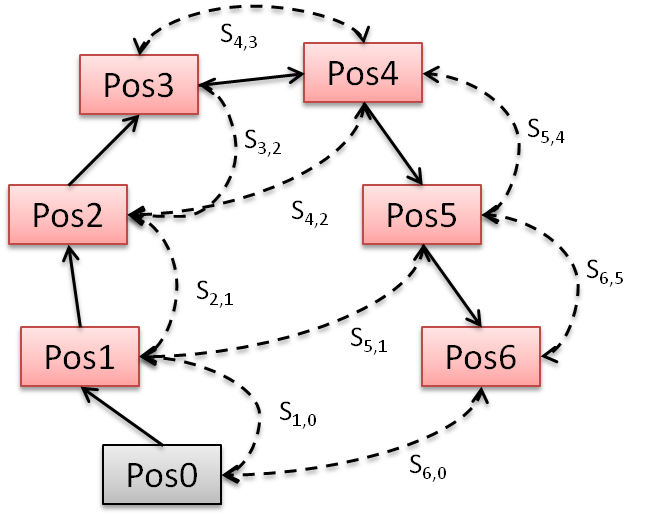
2.5 Sim3上的位姿优化
单目SLAM一般都会发生尺度(scale)漂移,因此Sim3上的优化是必要的。相对于SE3,Sim3的自由度要多一个,而且优化的目标是矫正尺度因子,因此优化并没有加入更多的变量(如三维点)。
作者在检测到闭环时在Sim3上对所有的位姿进行一次优化。定义Sim3上的残差如下:
e i,j =log Sim3 (S ij S jw S −1 iw ) ei,j=logSim3(SijSjwSiw−1)
其中S iw Siw的初值是尺度为1的Pos i相对于世界坐标系的变换矩阵。S i,j Si,j为Pos i和Pos j之间的(Sim3优化之前的)相对位姿矩阵,表示S iw Siw和S jw Sjw之间的测量(measurement)。此处相当于认为局部的相对位姿是准确的,而全局位姿有累计误差,是不准确的。
三、小结
个人理解,单目SLAM中的优化需要更多技巧,要有明确的优化目标,要仔细权衡其中的参数选择、自由度、速度和稳定性。
该系列的其它文章:
ORB-SLAM(一)简介
ORB-SLAM(二)性能
ORB-SLAM(三)初始化
ORB-SLAM(四)追踪
ORB-SLAM(六)回环检测
Taily老段的微信公众号,欢迎交流学习
https://blog.csdn.net/taily_duan/article/details/81214815
这篇关于【Android】SLAM:ORB-SLAM 位姿优化的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



