本文主要是介绍Blender简单卡通材质体现2,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

这次换一个东西做,就做奇幻妹弓(爽弓)的晃悠悠吧。
整体步骤和我上一次做的椅子没什么大区别,这次多了渐变色和贴图绘制,灯光、阴影调整、拆UV就省略了(需要的话直接去看我上一篇文章)。
目录
- 一、晃悠悠本体卡通材质
- 二、晃悠悠本体贴图绘制
- 三、晃悠悠耳朵渐变调整
- 四、晃悠悠描边
一、晃悠悠本体卡通材质
1、准备好模型并创建一个材质。

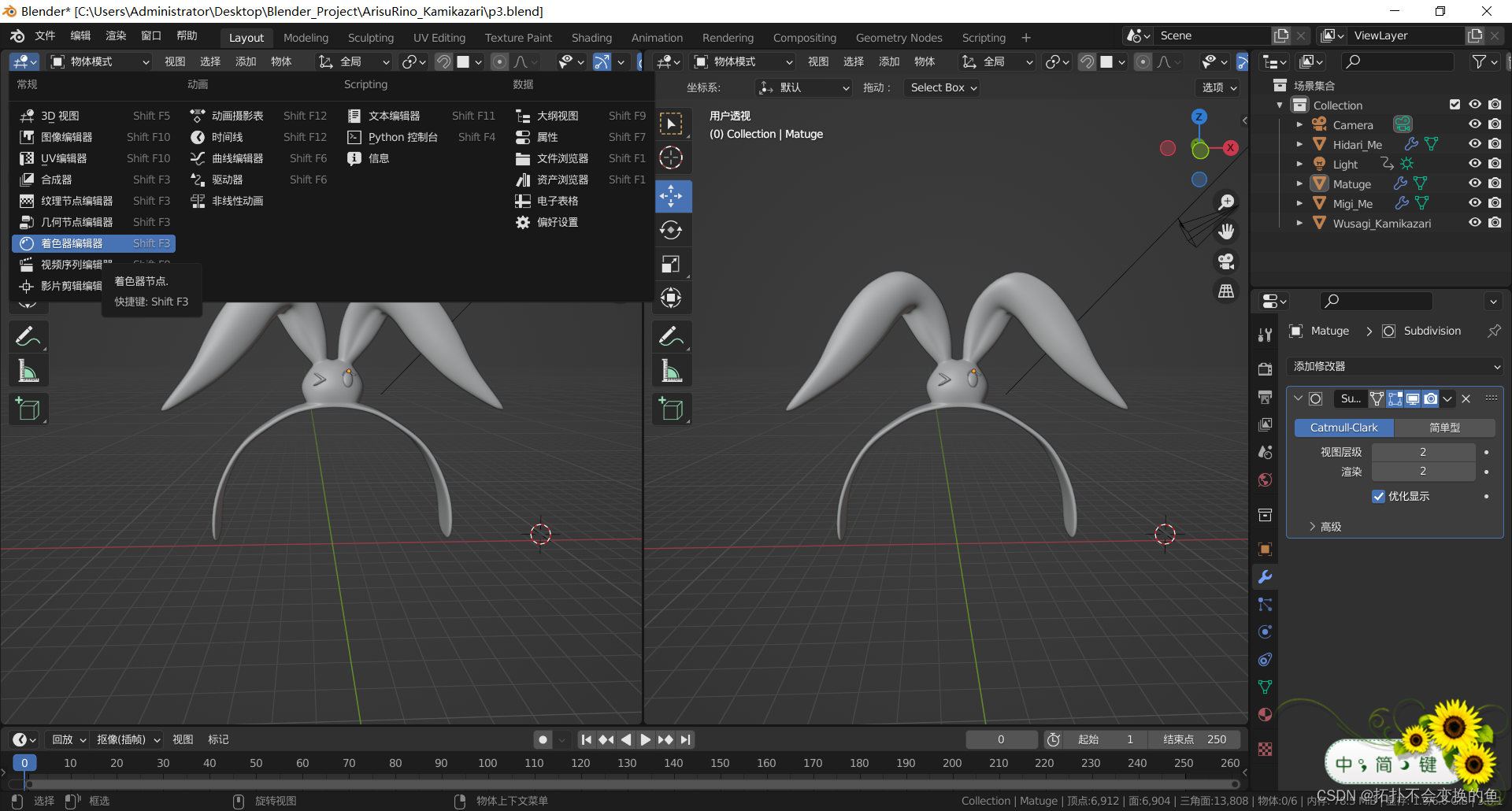
2、从左上角拖出新模块,选择着色器编辑器。
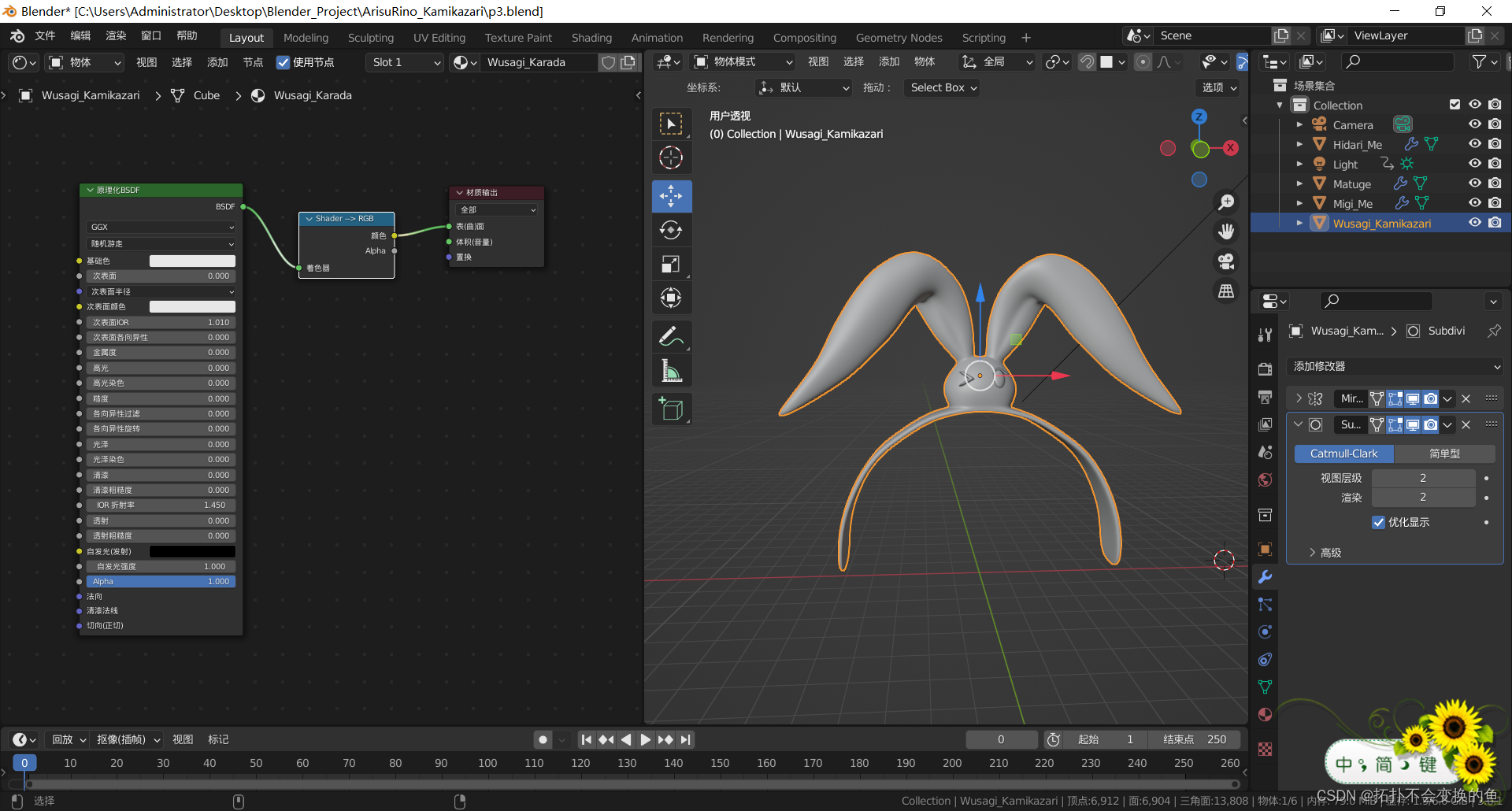
3、将 "原理化BSDF"的各项数值清零,新建一个 “Shader -> RGB”。

4、再在 “Shader -> RGB” 和 “材质输出” 中间新增一个 “颜色渐变” 节点。

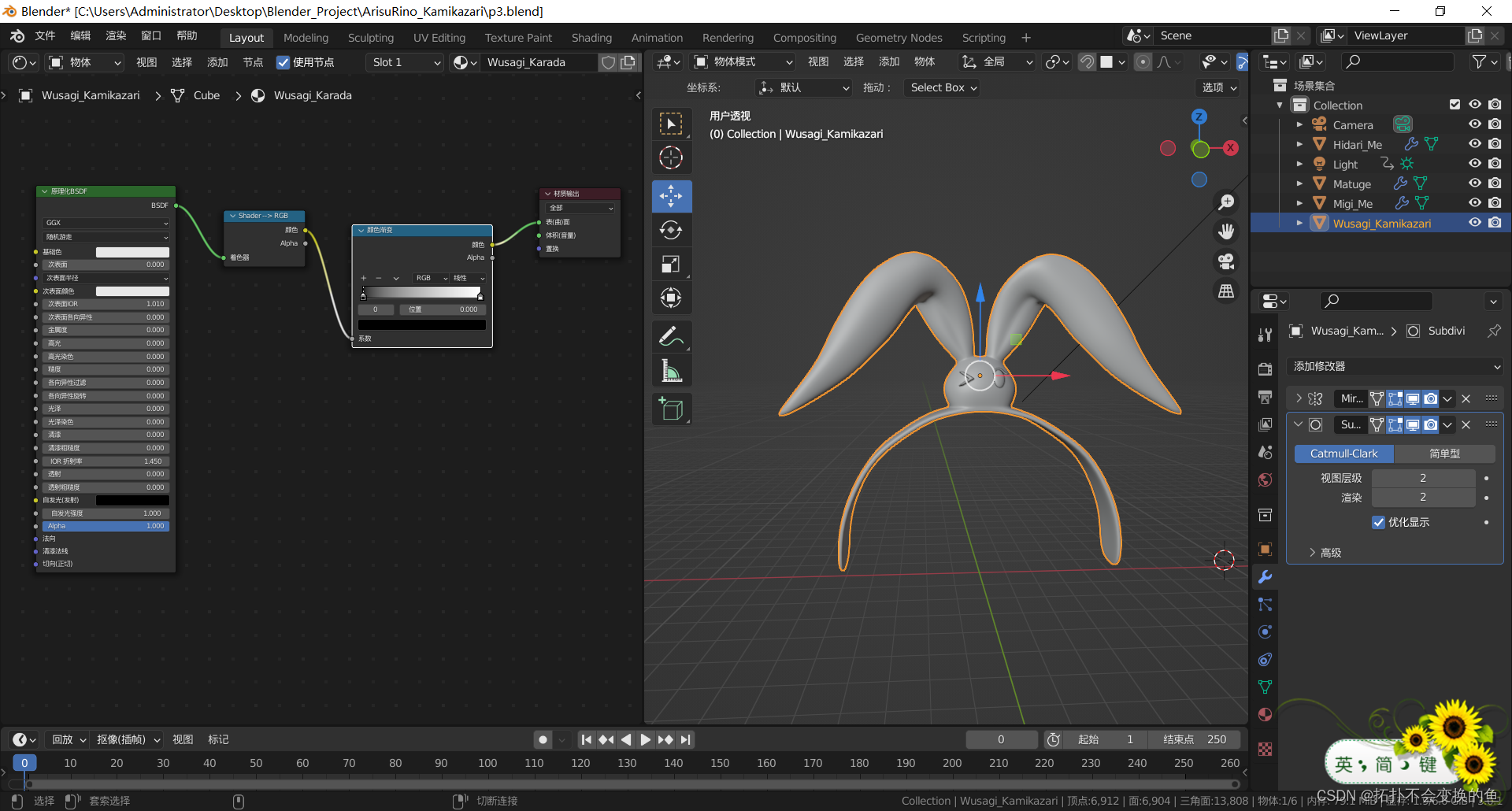
5、调节 “颜色渐变” 节点,将 “插值算法” 默认的 “线性” 改为 “常值”(根据需求调整。)
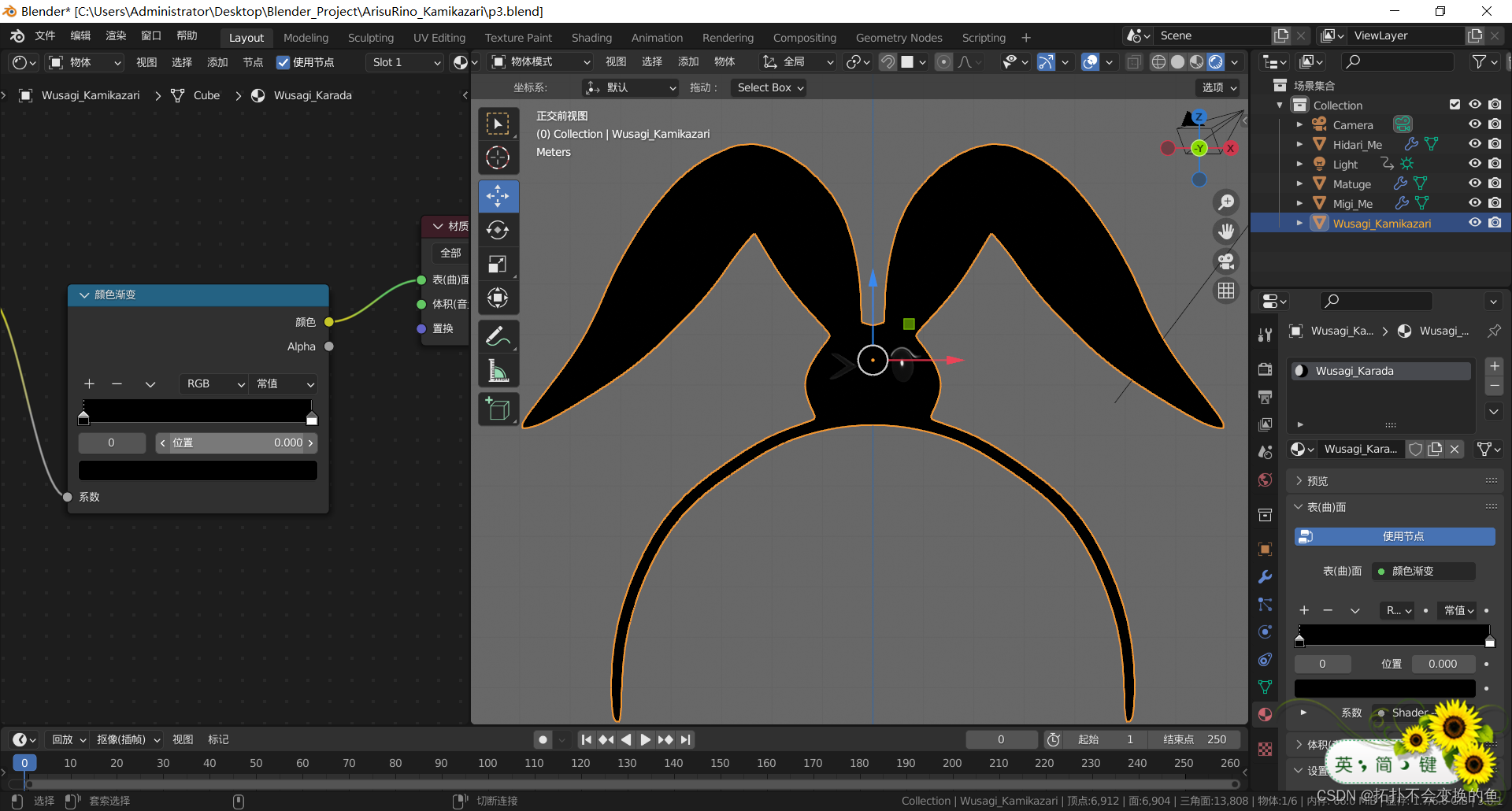
6、拖动,调节滑块进行颜色调整。

这篇关于Blender简单卡通材质体现2的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






