本文主要是介绍智能机器人利用3D视觉无序抓取纸箱拆码垛案例,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
背景
随着物流行业的飞速发展,纸箱的拆码垛成为了一个重要的环节。传统的拆码垛方式往往依赖于人工,不仅效率低下,还存在安全隐患。因此,开发一种基于3D视觉引导的纸箱拆码垛系统成为了行业的迫切需求。
解决方案
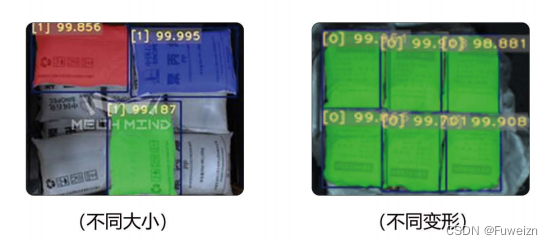
本方案采用3D视觉技术,通过高清摄像头捕捉纸箱的三维形状和位置信息,再通过算法处理,实现对纸箱的精准识别和定位。系统可以根据纸箱的大小、形状和位置,自动规划拆码垛的路径和顺序,确保拆码垛过程的准确性和高效性。

优势
高效性:通过3D视觉技术,系统可以迅速捕捉纸箱信息,实现快速拆码垛。
准确性:系统可以精准识别和定位纸箱,避免误操作和碰撞。
安全性:减少了人工参与,降低了操作风险,提高了工作安全性。
适应性:系统可以适应不同形状和大小的纸箱,具有较强的通用性。
应用场景
本方案适用于各种规模的物流仓库、生产车间等场景,特别是对于需要大量拆码垛作业的场所,效果尤为显著。
随着人工智能和机器视觉技术的不断发展,基于3D视觉引导的纸箱拆码垛系统将更加智能、高效,为物流行业带来更大的便利和价值。
这篇关于智能机器人利用3D视觉无序抓取纸箱拆码垛案例的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






