本文主要是介绍OpenMV4 基于色块识别的图形+颜色+坐标识别代码(micropython),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Hello大家好,最近竞赛需要开始研究OpenMV4,今天和大家分享一段基于色块识别的图形+颜色+坐标识别代码,实测准确率高于90%哦,当然,需要在光线和距离都合适的情况下使用(假如你的识别结果不尽如人意,可以自行调节颜色阈值和目标与摄像头的距离),下面,话不多说,上代码!(需要搭配OpenMV IDE使用)
# Untitled - By: zzy - 周五 11月 25 2022import sensor, image, time
from pyb import UART
import jsonoutput_str_green="[0,0]"
output_str_red="[0,0]"
output_str_blue="[0,0]"
output_str_brown="[0,0]"
output_str_yellow="[0,0]"#green_threshold = ( 0, 80, -70, -10, -0, 30)
green_threshold = ( 3, 39, -29, 2, 1, 25)
red_threshold = ( 28, 40, 51, 65, 22, 50)
orange_threshold = ( 23, 39, 19, 42, 13, 31)
blue_threshold = ( 50, 56, -14, 1, -31, -13)
brown_threshold = ( 22, 30, 1, 17, 8, 25)
yellow_threshold = ( 53, 58, -7, 3, 58, 63)sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_windowing((0,20,320,200))#QVGA find Region Of Interest
#sensor.set_windowing((5,10,160,95))#QQVGA find Region Of Interest
sensor.skip_frames(10)
sensor.set_auto_whitebal(False)
clock = time.clock()uart = UART(3, 115200)
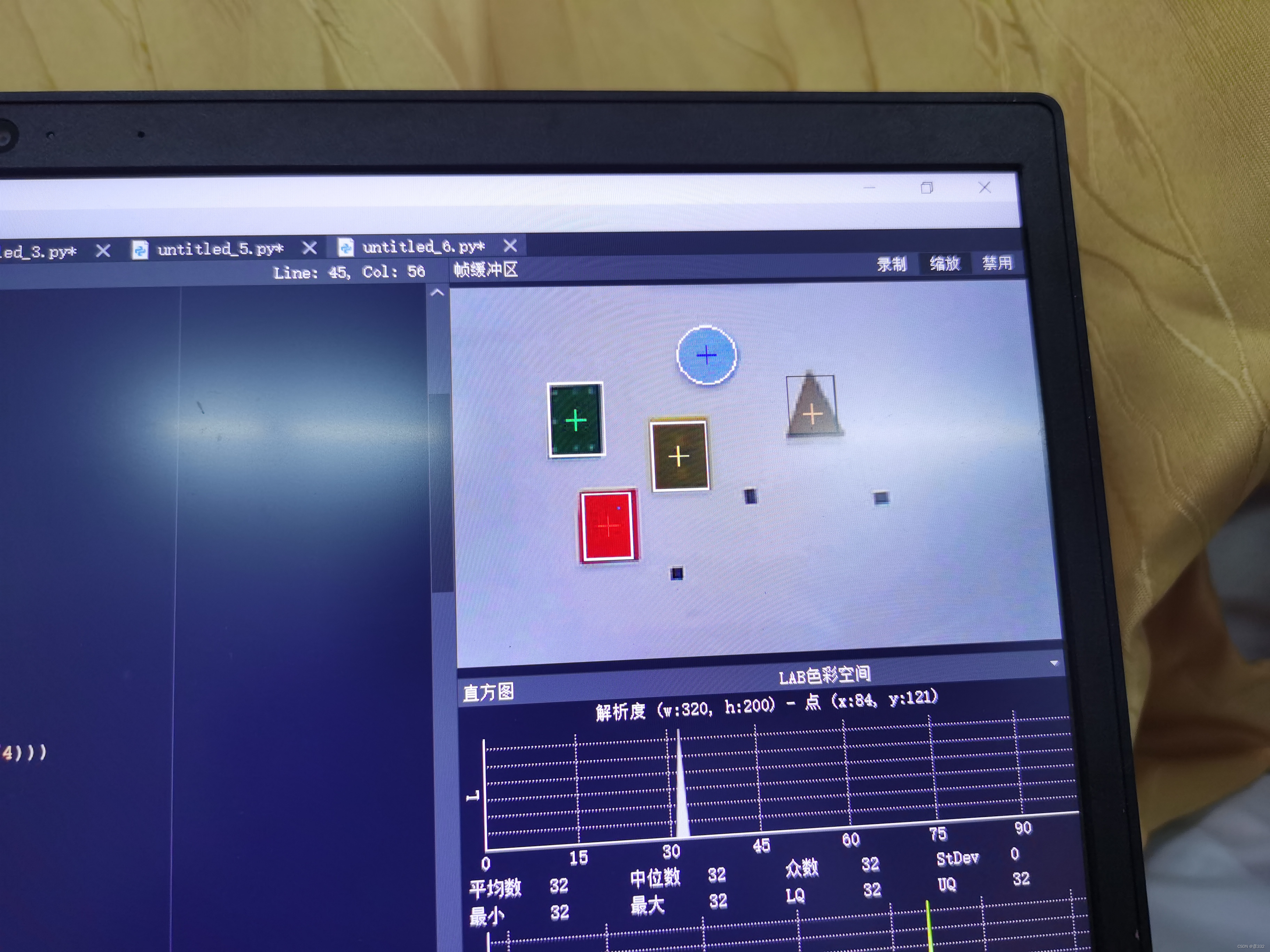
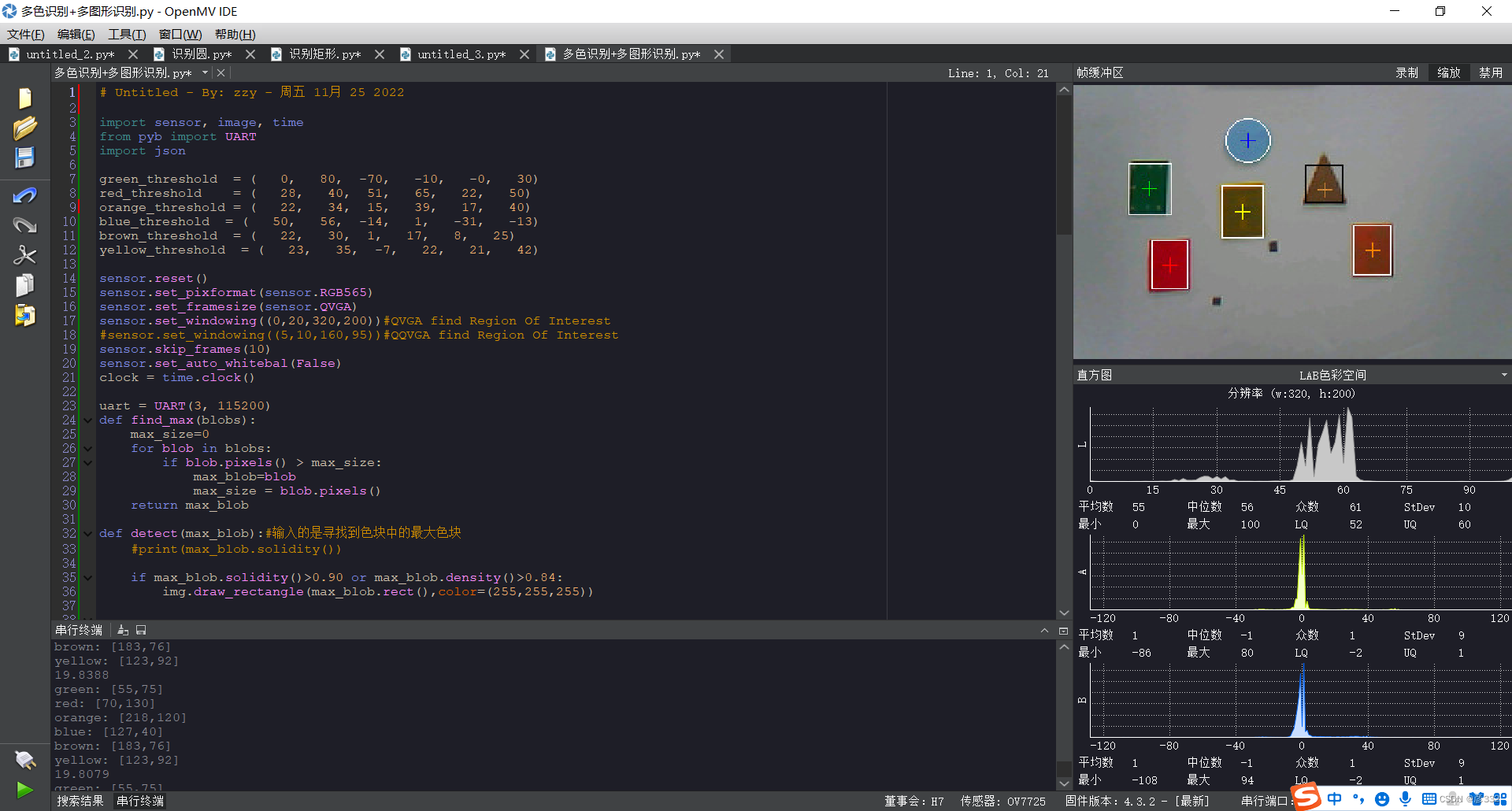
def find_max(blobs):max_size=0for blob in blobs:if blob.pixels() > max_size:max_blob=blobmax_size = blob.pixels()return max_blobdef detect(max_blob):#输入的是寻找到色块中的最大色块#print(max_blob.solidity())shape=0if max_blob.solidity()>0.90 or max_blob.density()>0.84:img.draw_rectangle(max_blob.rect(),color=(255,255,255))shape=1elif max_blob.density()>0.6:img.draw_circle((max_blob.cx(), max_blob.cy(),int((max_blob.w()+max_blob.h())/4)))shape=2elif max_blob.density()>0.4:img.draw_rectangle(max_blob.rect(),color=(0,0,0))shape=3return shapewhile(True):#clock.tick()img = sensor.snapshot() # Take a picture and return the image.blobs_green = img.find_blobs([green_threshold])blobs_red = img.find_blobs([red_threshold])#blobs_orange = img.find_blobs([orange_threshold])blobs_blue = img.find_blobs([blue_threshold])blobs_brown = img.find_blobs([brown_threshold])blobs_yellow = img.find_blobs([yellow_threshold])if blobs_green:max_blob_green=find_max(blobs_green)shape_green=detect(max_blob_green)#img.draw_rectangle(max_blob_green.rect(),color=(0,255,0))#画框img.draw_cross(max_blob_green.cx(), max_blob_green.cy(),color=(0,255,0))#画十字准星output_str_green="[%d,%d,%d]" % (max_blob_green.cx(),max_blob_green.cy(),shape_green) #方式1print('green:',output_str_green)else:print('not found green!')if blobs_red:max_blob_red=find_max(blobs_red)shape_red=detect(max_blob_red)#img.draw_rectangle(max_blob_red.rect(),color=(255,0,0))img.draw_cross(max_blob_red.cx(), max_blob_red.cy(),color=(255,0,0))output_str_red="[%d,%d,%d]" % (max_blob_red.cx(),max_blob_red.cy(),shape_red) #方式1print('red:',output_str_red)else:print('not found red !')#if blobs_orange:#max_blob_orange=find_max(blobs_orange)#detect(max_blob_orange)##img.draw_rectangle(max_blob_orange.rect(),color=(255,128,0))#img.draw_cross(max_blob_orange.cx(), max_blob_orange.cy(),color=(255,128,0))#output_str_orange="[%d,%d]" % (max_blob_orange.cx(),max_blob_orange.cy()) #方式1#print('orange:',output_str_orange)#uart.write(output_str_orange+'\r\n')#else:#print('not found orange !')if blobs_blue:max_blob_blue=find_max(blobs_blue)shape_blue=detect(max_blob_blue)#img.draw_rectangle(max_blob_blue.rect(),color=(0,0,255))img.draw_cross(max_blob_blue.cx(), max_blob_blue.cy(),color=(0,0,255))output_str_blue="[%d,%d,%d]" % (max_blob_blue.cx(),max_blob_blue.cy(),shape_blue) #方式1print('blue:',output_str_blue)else:print('not found blue !')if blobs_brown:max_blob_brown=find_max(blobs_brown)shape_brown=detect(max_blob_brown)#img.draw_rectangle(max_blob_brown.rect(),color=(205,133,63))img.draw_cross(max_blob_brown.cx(), max_blob_brown.cy(),color=(205,133,63))output_str_brown="[%d,%d,%d]" % (max_blob_brown.cx(),max_blob_brown.cy(),shape_brown) #方式1print('brown:',output_str_brown)else:print('not found brown !')if blobs_yellow:max_blob_yellow=find_max(blobs_yellow)shape_yellow=detect(max_blob_yellow)#img.draw_rectangle(max_blob_yellow.rect(),color=(255,255,0))img.draw_cross(max_blob_yellow.cx(), max_blob_yellow.cy(),color=(255,255,0))output_str_yellow="[%d,%d,%d]" % (max_blob_yellow.cx(),max_blob_yellow.cy(),shape_yellow) #方式1print('yellow:',output_str_yellow)else:print('not found yellow !')uart.write(output_str_green + output_str_red + output_str_blue + output_str_brown + output_str_yellow + '\r\n')#print(clock.fps())再来看看程序的运行结果吧 ,在识别出多个图形,颜色及坐标之后,性能仍然不赖
解除部分注释之后可以查看帧数以调整性能,开发者还可以根据自己的需求增加被检测颜色与图形,再将其通过串口发送到目标单片机上哦,假如之后有时间,我再出一份解释代码含义的文章,嘻嘻,就看大家的需求和小编的时间啦。
这篇关于OpenMV4 基于色块识别的图形+颜色+坐标识别代码(micropython)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







