openmv4专题

第五章-OpenMV4 色块识别的图形圆形 正方形识别、 黑色红色识别颜色、坐标识别
项目比赛中需要识别黑色圆形和黄色方形状 要是识别的圆形 openmv代码如下代码带了阈值如何更改阈值 可以使用下面方法 这里是循迹 把循迹线调节成白色就是颜色追踪阈值 把线 调整成 import sensor, image, timesensor.reset() # 重置图像传感器sensor.set_pixformat(sensor.RGB565) # 设置像素格式为RG
OpenMV4 基于色块识别的图形+颜色+坐标识别代码(micropython)
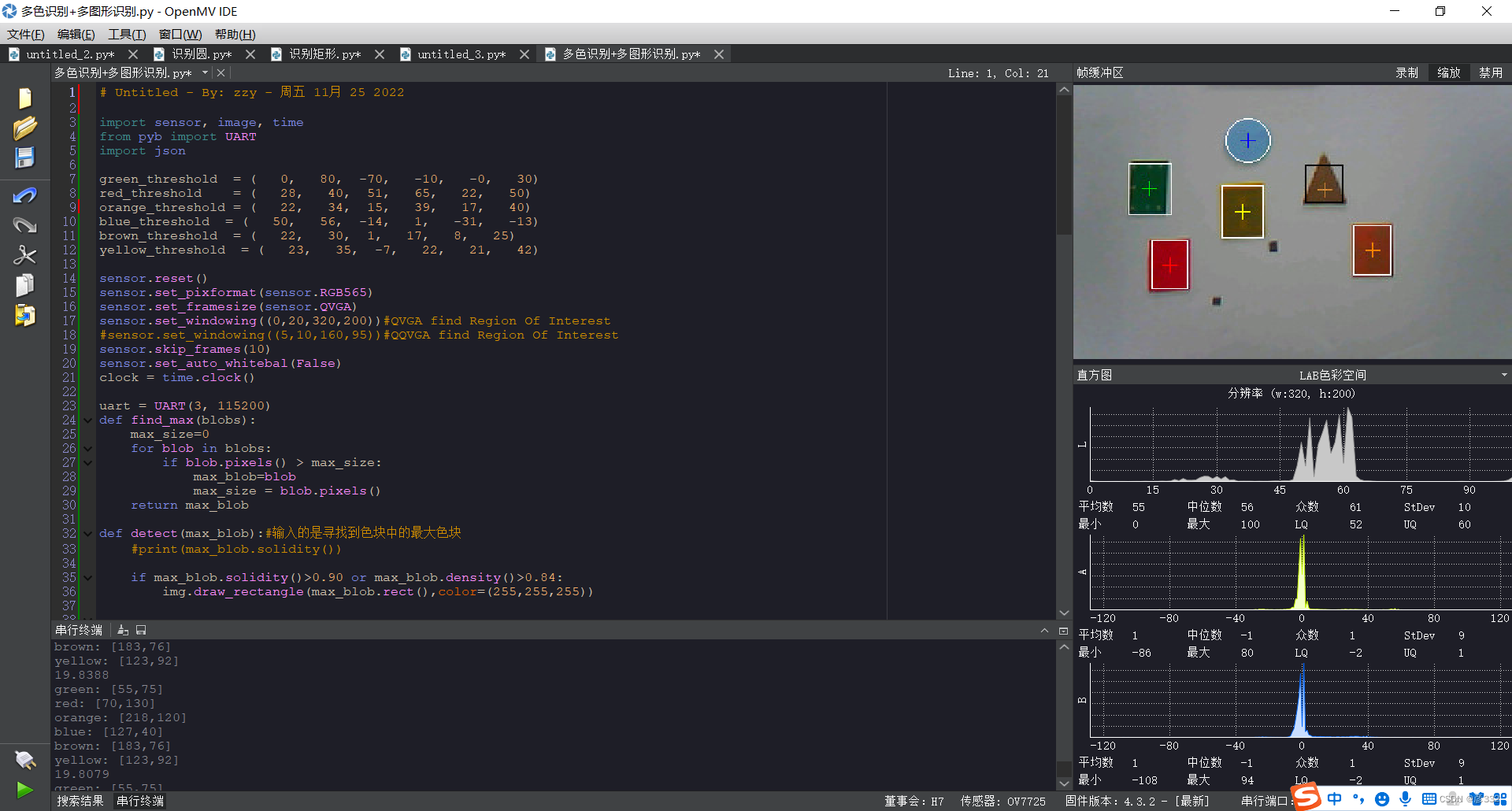
Hello大家好,最近竞赛需要开始研究OpenMV4,今天和大家分享一段基于色块识别的图形+颜色+坐标识别代码,实测准确率高于90%哦,当然,需要在光线和距离都合适的情况下使用(假如你的识别结果不尽如人意,可以自行调节颜色阈值和目标与摄像头的距离),下面,话不多说,上代码!(需要搭配OpenMV IDE使用) # Untitled - By: zzy - 周五 11月 25 2022im

OpenMV4开发笔记1-感光元件初始化
import sensor, image, time#引入此例程依赖的模块,#sensor 是与摄像头参数设置相关的模块,#image 是图像处理相关的模块,#time 时钟控制相关的模块。#import 相当于 c 语言的#include <>,模块相当于 c 语言的库。sensor.reset() #初始化相机传感器sensor.set_pixformat(sensor.RGB5
openmv4闪灯说明_DFROBOT_Gravity: OpenMV Cam M7 I/O扩展板_DFR0578__产品说明_使用教程
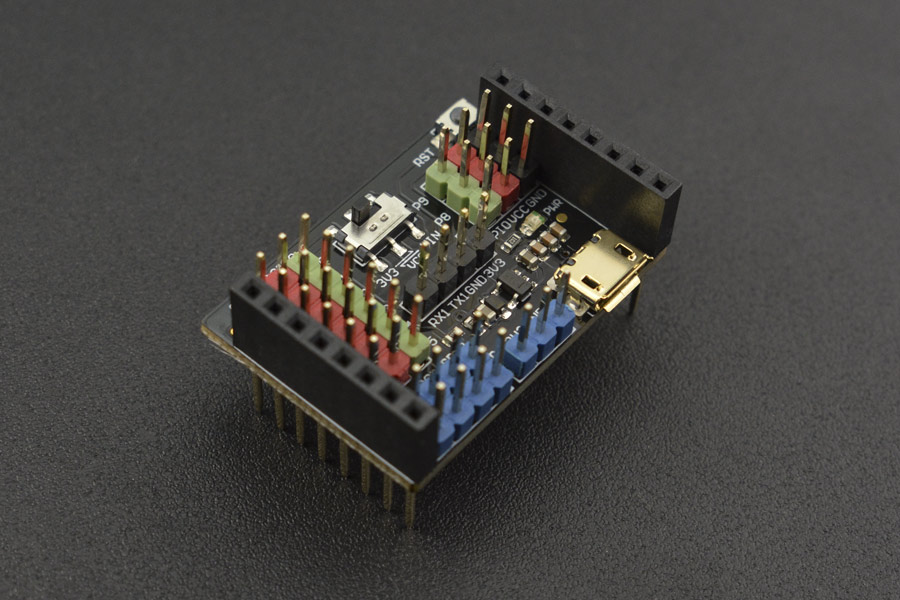
简介 Gravity: OpenMV Cam M7 I/O扩展板是一款专为OpenMV Cam M7设计的多功能扩展板,兼容Gravity系列各类传感器和电子模块,即插即用,无需焊接,不但为你省去了繁琐的连线、焊接等操作,而且能帮助你快速外接并上手各类传感器或电子模块,更快的搭建出原型。 扩展板配备了一个5V的外接供电接口和一个3.3V/VIN电源切换开关,支持电机、舵机等大电流元件;最大限度

OpenMV4 H7摄像头画面偏红
问题描述 OpenMV4 H7摄像头画面偏红 摄像头内出现芯片纹理 解决方案: 情况一:你把红外灯打开了,启动了红外模式 from pyb import UARTled4 = pyb.LED(4)led4.on() 把这些代码删了就行 情况二:红外光太多 除了红外镜头外,其他镜头都带650nm红外滤光片 看下你的镜头是哪种 或者 把白平