本文主要是介绍2015世界机器人大会-见闻录,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/50043013
博主地址是:http://blog.csdn.net/freewebsys
网站:
http://www.worldrobotconference.com/
直接上图:


陪伴机器人,机器身上有多个传感器,可以感知触摸。

这个比较大,但是没有通电,不知道啥样。

8个螺旋桨+顶部的2个螺旋桨。

线圈缠绕的很多很大,但是裸露在外面不知道下雨有问题不?

机器臂 kawasaki 川崎机器人,没想到造摩托车的也造机器人。日本机器人。

这么大家伙也放进来了,研华科技,台湾厂商,Advantech。

哈尔滨行健智能机器人XiRobot,能在铁管子上面行走,有吸铁石。
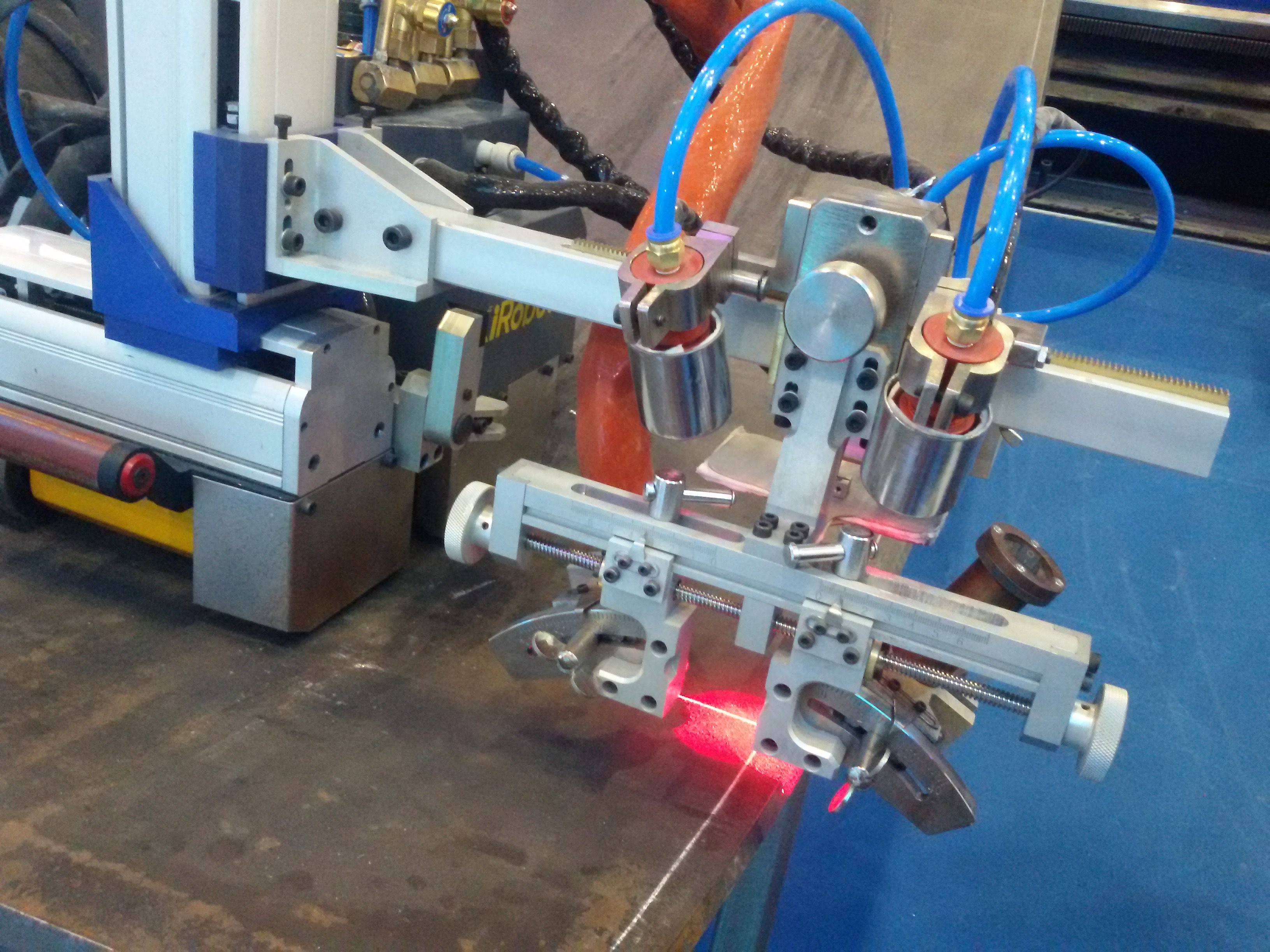
在管子里面方便多了。

4旋翼飞行器看来非常火了。
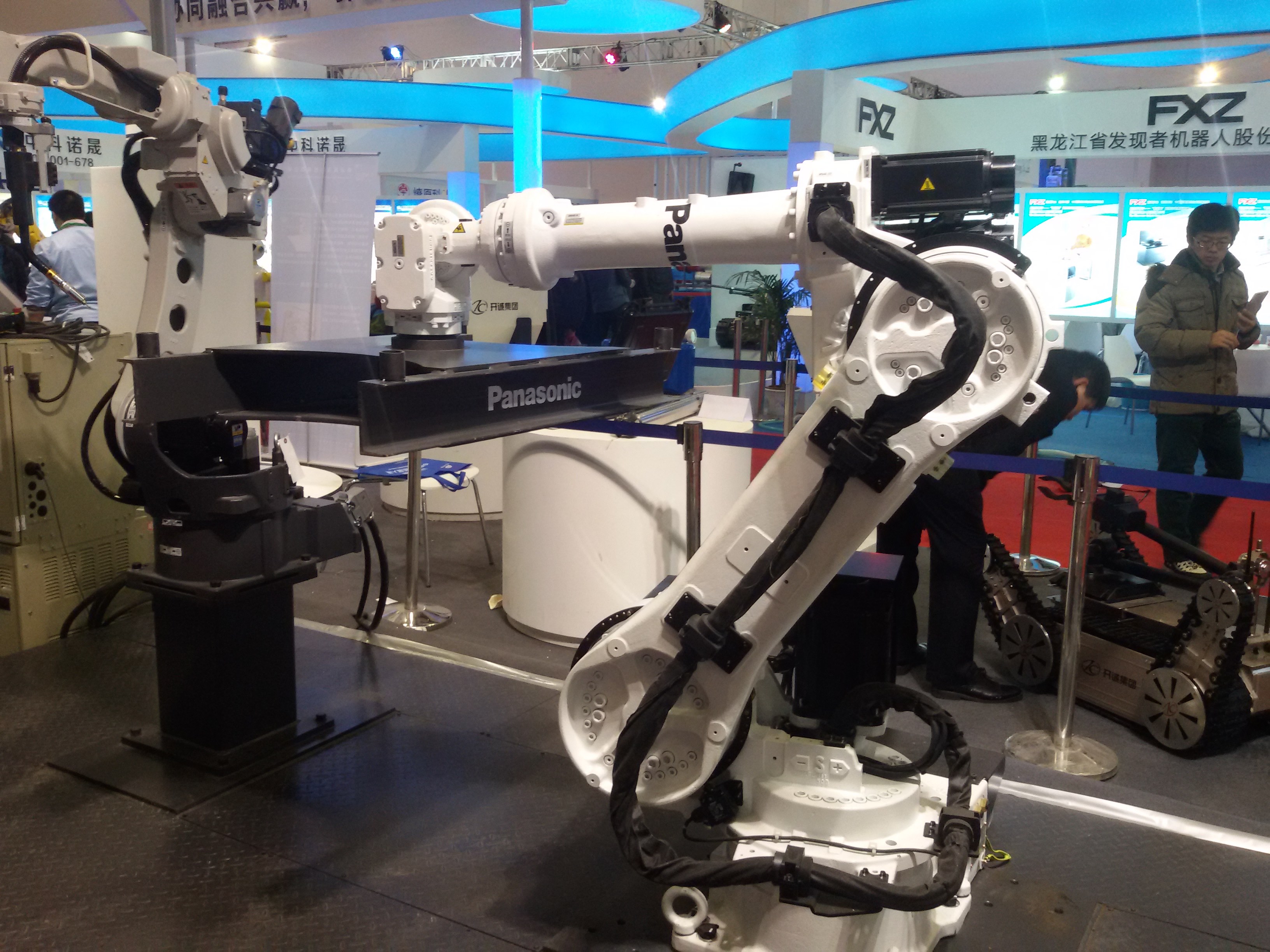
Panasonic 松下机器人,又一个日本机器人。

日本神钢 ARCMAN 机器人。

月球车模型。真机现在还在月球上呢。
教学用的,太难看了,跟我玩的差不多。
诺博特机器人,这个是国产的。

试验机器人,脚多不实际。好像是个消防机器人。

中航机器人,非常不错。
这个是个啥,没有看明白。

好像是卫星上的机器人。离我们很遥远。

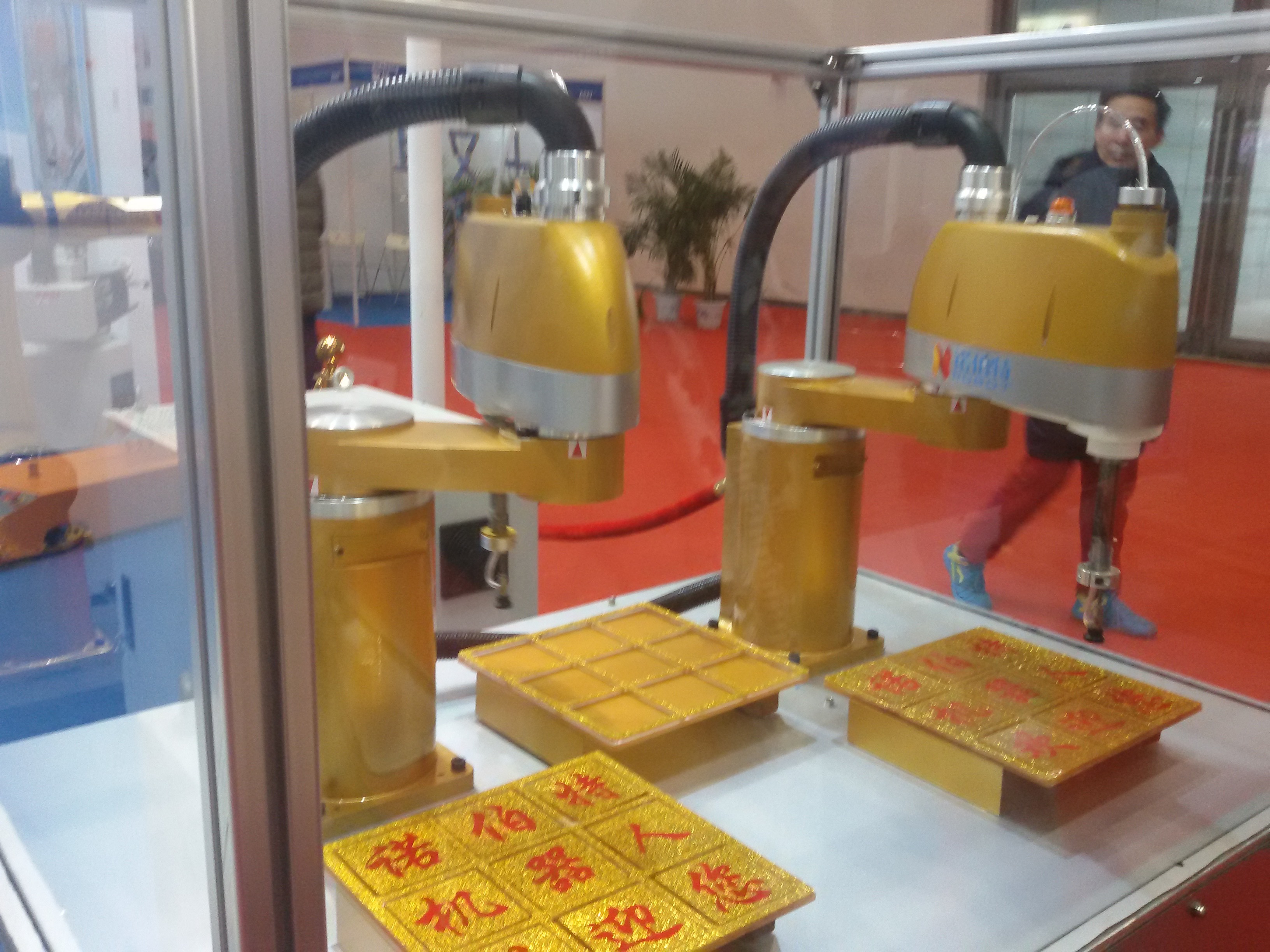
KinGER robot 软控科捷 山东的公司,是个贴片机器人。速度非常快。非常不错呢。
这个是用非常小的小球摆成的。写的是中国梦 (中國夢)看着像,读的书不多。

放在玻璃柜子里面的机器人。不知道是做啥的。上面带吸盘。

suba 速霸机器人,山东速霸设备公司的。非常不错。

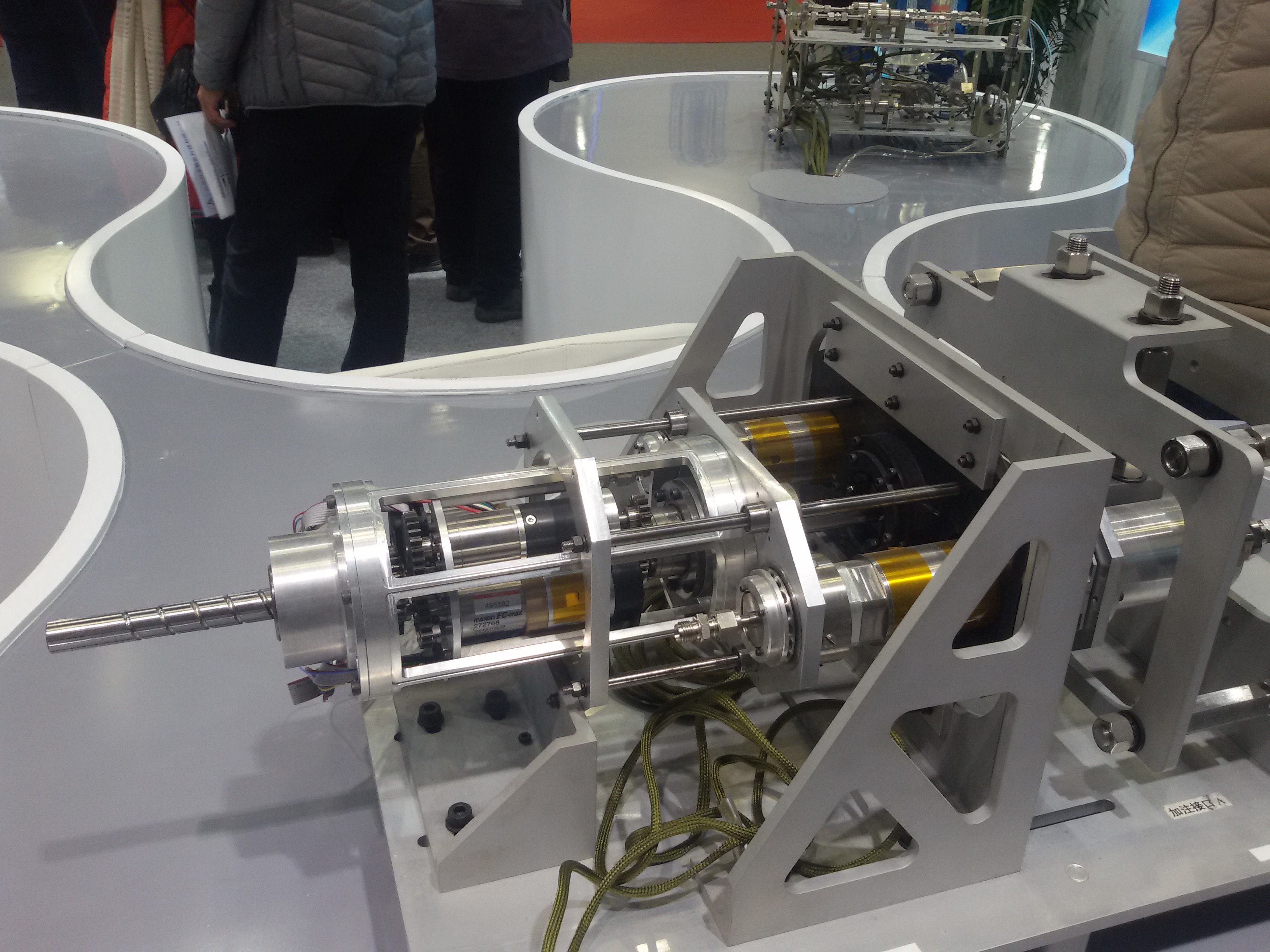
机器人关节减速齿轮。
秦川机床工具集团的。

交通银行的娇娇机器人。

KuKa 机器人,德国的。

小胖机器人,挺好玩的。功能非常多,还带净化器和投影仪。

医疗机器人。

cyb-bot 塞伯特机器人,国产的,像个塔吊。

香港的羽毛球机器人,非常有创意呢。

中国制造 2025 ,时代集团的机器人。

再来一张。

德国ABB机器人。动作很流畅。

sinsun 新松机器人,中科院下属的。

ctr中国长泰机器人,占了好大一片地方。还搭建了一个古建筑。

3个机器人举着的大屏幕。还能动。

敲击古乐器,编钟。

焊接机器人,还是ctr的。

机器人写的中国梦。

这个是个巨大的机器人。估计是摆放货物用的。

欣奕华(Sineva) 北京的公司。

还有一个小个子的。
价格也非常贵,350 RMB一个。

这个机器人是成品,可以直接开发,价格也呵呵了。(5W)


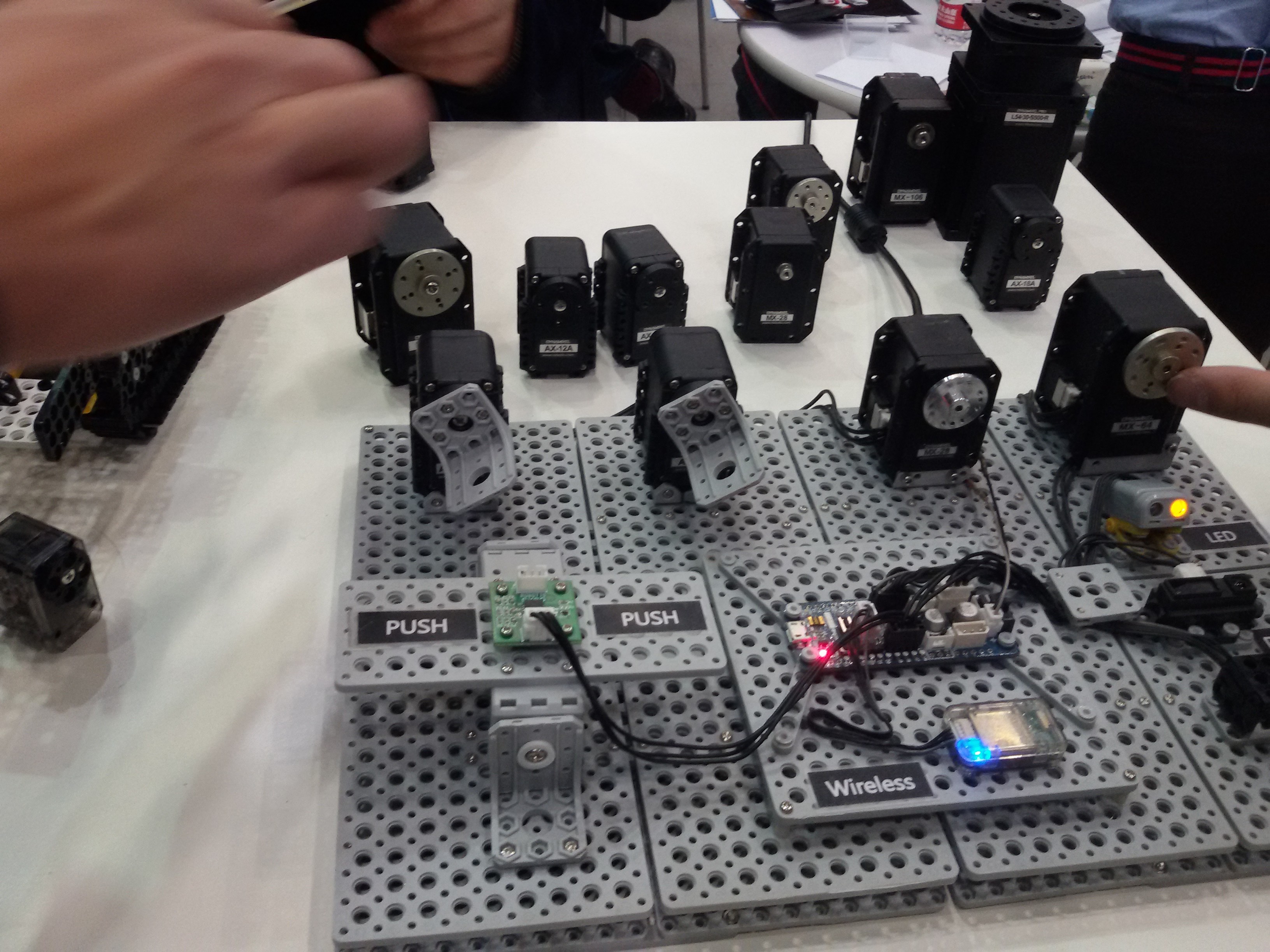
Robotis,非常贵。是给 12 岁小孩子玩的。

擎天柱机器人,还会动,跳小苹果。
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/50043013
博主地址是:http://blog.csdn.net/freewebsys
总结
真的是很震撼的机器人大会。
国产,国外的机器人大展览。中国有非常多的企业也是很不错的。
现在中国要发展机器人。靠中国人的智慧和勤劳走入世界先进水平一定没有问题。
中国梦加油。
这篇关于2015世界机器人大会-见闻录的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








