本文主要是介绍端到端自动驾驶通用算法框架UniAD,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
端到端自动驾驶通用算法框架UniAD
引言
自动驾驶是一项高度复杂的技术,需要多个学科领域的知识和技能,包括传感器技术、机器学习、路径规划等方面。自动驾驶还需要适应不同的道路规则和交通文化,与其他车辆和行人进行良好的交互,以实现高度可靠和安全的自动驾驶系统。面对这种复杂的场景,大部分自动驾驶相关的工作都聚焦在具体的某个模块,关于框架性的研讨则相对匮乏。自动驾驶通用算法框架——Unified Autonomous Driving(UniAD)首次将检测、跟踪、建图、轨迹预测,占据栅格预测以及规划整合到一个基于 Transformer 的端到端网络框架下, 完美契合了 “多任务”和“高性能”的特点,可称为自动驾驶中的技术突破。地平线与上海人工智实验室提出了自动驾驶通用算法框架——Unified Autonomous Driving(UniAD)。UniAD 首次将检测,跟踪,建图,轨迹预测,占据栅格预测以及规划整合到一个基于 Transformer 的端到端网络框架下,在 nuScenes 数据集下的所有相关任务都达到 SOTA 性能,尤其是预测和规划效果远超其他模型。

感知决策一体化自动驾驶大模型
自动驾驶是一个高度复杂的技术体系,不仅需要多个学科领域的知识和技能,包括传感器硬件、机器学习、多模态融合等内容,还需要适应不同国家与地区的道路规则和交通文化,与车辆及行人进行良好的交互,以实现高度的可靠性和安全性。
自动驾驶系统中包含三大主任务即,感知、预测和规划。当前,业界主流的方案架构分别采用不同的模块来处理这些具体任务,但由于各模块并非以驾驶为最终目标进行优化,因而自动驾驶系统的整体性能提升受到了很大限制。
在UniAD中,研究人员首次将感知、预测和规划等三大类主任务、六小类子任务(目标检测、目标跟踪、场景建图、轨迹预测、栅格预测和路径规划)整合到统一的基于 Transformer的端到端网络框架下,实现了全栈关键任务驾驶通用模型。在 nuScenes 真实场景数据集下,UniAD的所有任务均达到领域最佳性能(State-of-the-art),尤其是预测和规划效果远超之前的最佳方案。其中,多目标跟踪准确率超越SOTA 20%,车道线预测准确率提升30%,预测运动位移和规划的误差则分别降低了38%和28%。
核心技术
多组 query 的全 Transformer 模型
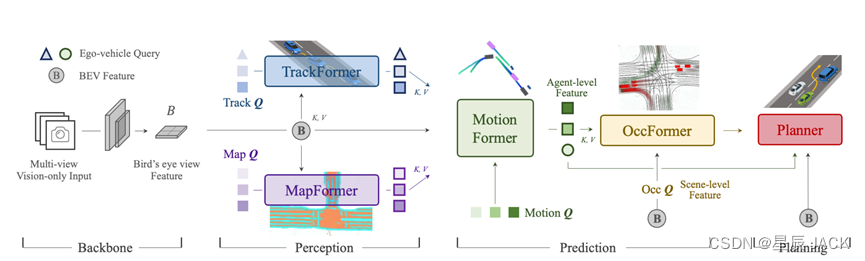
UniAD利用多组query 实现了全栈Transformer的端到端模型,我们可以从具体 Transformer的输入输出感受到信息融合。
- 在TrackFormer中,Track query通过与BEV特征通过attention的方式进行交互,输出Track特征QA。
- Map query经过MapFormer的更新后,得到特征QM
- MotionFormer使用Motion query与QA、QM以及BEV特征进行交互,得到未来轨迹特征QX。
- OccFormer 以密集的BEV特征为Q和稀疏的特征QA对应的位置信息PA和QX作为K和V来构建实例级别的占据栅格。
基于最终“规划”为目标
在 TrackFormer 中,Track query 中包含一个特定的 ego-vehicle query 用来表示自车属性。规划模块 (Planner) 将 MotionFormer 更新后的 ego-vehicle query 与 BEV 特征进行交互,此时 ego-vehicle query 包含对整个环境的感知与预测信息,因此能更好的学习 planning 任务。为了减少碰撞,我们还利用占据栅格预测模块 OccFormer 的输出对自车路径进行优化,避免行驶到未来可能有物体占用的区域。在这个过程中,全部的模块通过输出特定的特征来帮助实现最终的目标“规划”。
整体流程优化
当前大部分自动驾驶系统研究,都聚焦在具体的某个模块,缺少能够实现端到端联合优化的通用网络模型。现有的自动驾驶系统可大致归为三类:(a)模块化组成的系统;(b)多任务模块架构的系统;(c)端到端自动驾驶系统。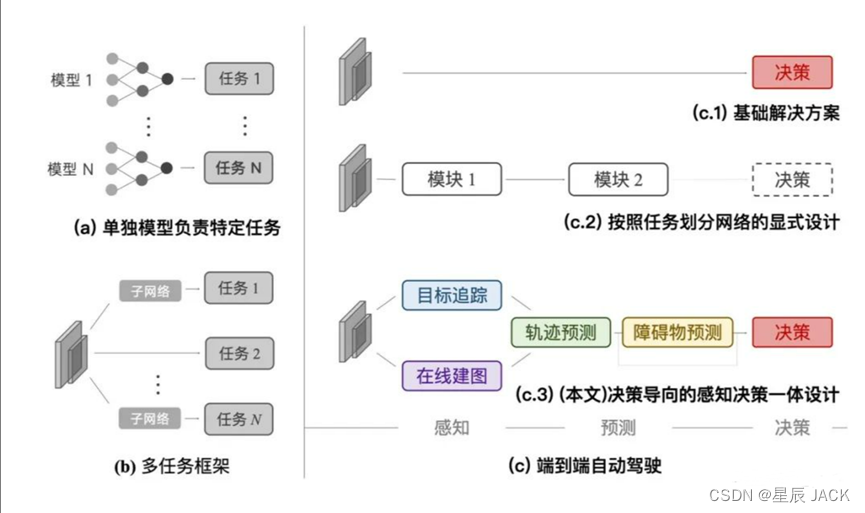
其中传统的端到端算法可分为:基础的端到端算法,直接从传感器输入预测控制输出,但是优化困难,在充满复杂视觉信息的真实场景中应用面临较大挑战;(按照任务划分网络的显式设计,但是网络模块之间缺乏有效的特征沟通,需要分阶段的输出结果,任务间缺乏有效交互。本文提出的决策导向的感知决策一体设计方法,用token特征按照感知-预测-决策的流程进行深度融合,使得以决策为目标的各项任务指标一致提升。
未来展望
总的来说,UniAD 作为一项极具创新性的自动驾驶技术,具有很大的潜力和应用价值。尽管该技术目前仍处于发展初期,但其已经引起了人们的广泛兴趣和关注,未来的发展前景非常值得期待。希望UniAD能充分利用现在海量数据驱动的优势,在未来实现高阶的自动驾驶人工智能。
参考链接
- https://blog.csdn.net/CV_Autobot/article/details/131356302
- https://mp.weixin.qq.com/s/8svV4yxRi6TikcRivgHr_A
- https://zhuanlan.zhihu.com/p/616433397
这篇关于端到端自动驾驶通用算法框架UniAD的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








