uniad专题
UniAD大模型开路,智能车驶入AGI时代
作者 |老缅 编辑 |德新 在刚刚结束不久的北京车展上,除一众明星车型亮相,供应链企业也开始大秀肌肉,其中尤其以端到端大模型为代表,焕新一代的智驾技术栈掀起了新一轮热潮。 作为首个提出感知决策一体化自动驾驶通用模型的公司,商汤绝影也在这次车展上第一次向公众展示了面向量产的端到端自动驾驶解决方案UniAD(Unified Autonomous Driving)的道路测试表现。 一、Uni
UniAD:以规划为导向的端到端自动驾驶
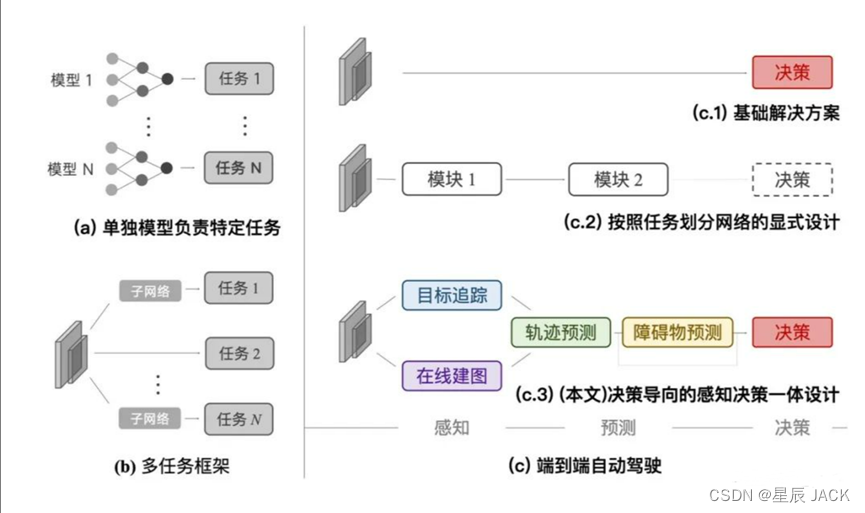
文章链接 这个文章是CVPR2023 Best Paper https://arxiv.org/pdf/2212.10156 提出背景 以往的自动驾驶多数是为不同的任务场景设计部署单独的模型,这样子组成的系统会很复杂如图a。 图b这是多任务共享一个主干,但还是要分离训练,而且不是端到端的。有没有什么方式你可以把所有的环节都串联起来,实现完整的端到端呢? c.1就是一个直接预测轨迹的
端到端自动驾驶通用算法框架UniAD
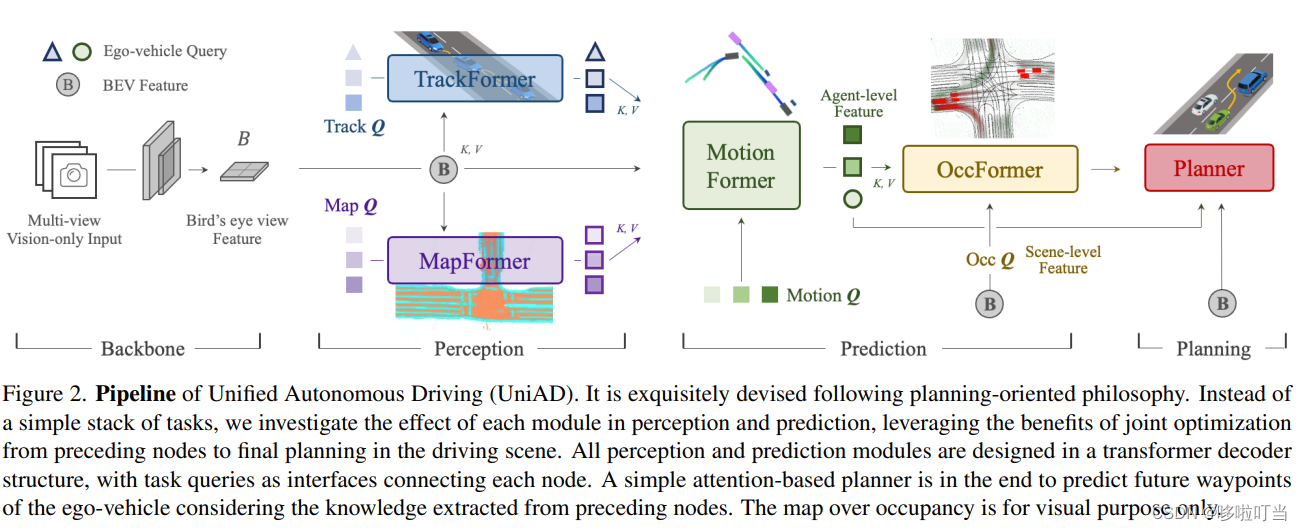
端到端自动驾驶通用算法框架UniAD 引言 自动驾驶是一项高度复杂的技术,需要多个学科领域的知识和技能,包括传感器技术、机器学习、路径规划等方面。自动驾驶还需要适应不同的道路规则和交通文化,与其他车辆和行人进行良好的交互,以实现高度可靠和安全的自动驾驶系统。面对这种复杂的场景,大部分自动驾驶相关的工作都聚焦在具体的某个模块,关于框架性的研讨则相对匮乏。自动驾驶通用算法框架——Unified A

UniAD 论文学习
一、解决了什么问题? 当前的自动驾驶方案大致由感知(检测、跟踪、建图)、预测(motion、occupancy)和规划三个模块构成。 为了实现各种功能,智驾方案大致包括两种路线。一种是针对每个任务都部署一个模型,该范式能降低各团队间的研发困难度,但由于各个优化目标是孤立的,会引发模块之间信息丢失、错误累加和特征不对齐的问题。另一种是多任务的设计路线,多个任务 heads 共享一个特征提取器
解决UniAD在高版本CUDA、pytorch下运行遇到的问题
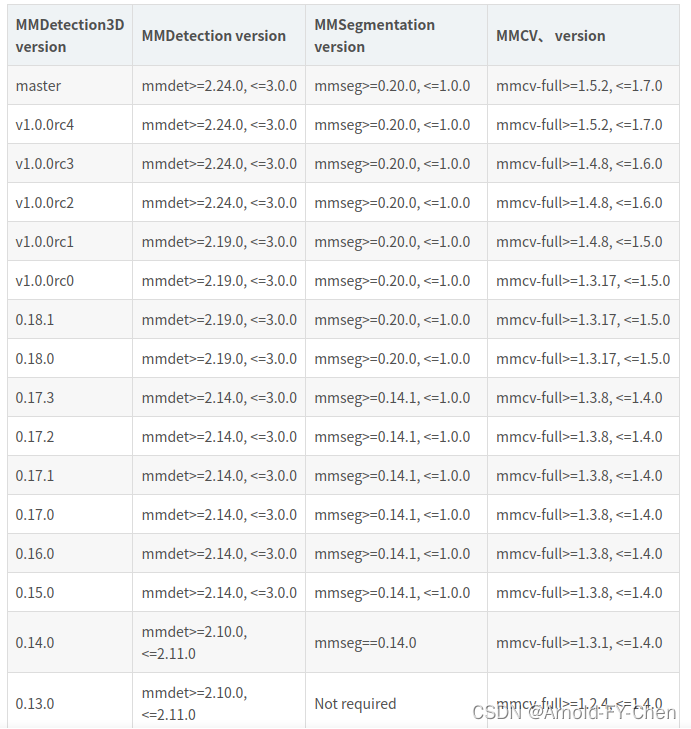
UniADhttps://github.com/OpenDriveLab/UniAD是面向行车规划集感知(目标检测与跟踪)、建图(不是像SLAM那样对环境重建的建图,而是实时全景分割图像里的道路、隔离带等行车需关注的相关物体)、和轨迹规划和占用预测等多任务模块于一体的统一大模型。官网上的安装说明是按作者使用的较低版本的CUDA11.1.1和pytorch1.9.1来的,对应的mmcv也是较低版本的
解决UniAD在高版本CUDA、pytorch下运行遇到的问题
UniADhttps://github.com/OpenDriveLab/UniAD是面向行车规划集感知(目标检测与跟踪)、建图(不是像SLAM那样对环境重建的建图,而是实时全景分割图像里的道路、隔离带等行车需关注的相关物体)、和轨迹规划和占用预测等多任务模块于一体的统一大模型。官网上的安装说明是按作者使用的较低版本的CUDA11.1.1和pytorch1.9.1来的,对应的mmcv也是较低版本的