本文主要是介绍调试安卓 gles性能瓶颈,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 下载Arm Performance Studio
- 编译Unity Shader
- 运行malios调试
- 用处和限制
原文请见:参考地址
使用mali offline shader compiler分析shader的性能瓶颈。
下载Arm Performance Studio
下载地址
编译Unity Shader
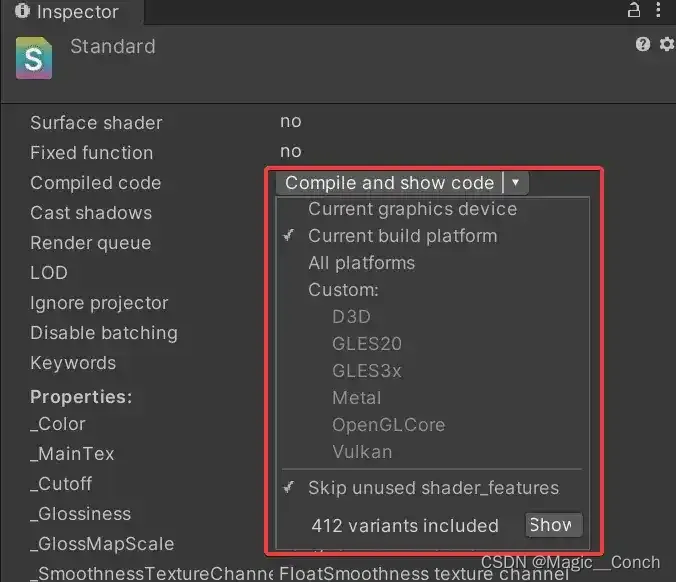
通常选择GLES3x。
You might need to select GLES3x, as this is the graphics API Mali works well with.
编译之后得到一个.shader文件,搜索#ifdef,可以分别把Vert和Frag下的代码粘贴到单独的文件中。
代码示例如下:
Vertex Shader: shader.vert
//#ifdef VERTEX
#version 300 es
#define HLSLCC_ENABLE_UNIFORM_BUFFERS 1
#if HLSLCC_ENABLE_UNIFORM_BUFFERS
#define UNITY_UNIFORM
#else
#define UNITY_UNIFORM uniform
#endif
#define UNITY_SUPPORTS_UNIFORM_LOCATION 1
#if UNITY_SUPPORTS_UNIFORM_LOCATION
#define UNITY_LOCATION(x) layout(location = x)
#define UNITY_BINDING(x) layout(binding = x, std140)
#else
#define UNITY_LOCATION(x)
#define UNITY_BINDING(x) layout(std140)
#endif
uniform vec3 _WorldSpaceCameraPos;
uniform mediump vec4 unity_SHBr;
uniform mediump vec4 unity_SHBg;
uniform mediump vec4 unity_SHBb;
uniform mediump vec4 unity_SHC;
uniform vec4 hlslcc_mtx4x4unity_ObjectToWorld[4];
uniform vec4 hlslcc_mtx4x4unity_WorldToObject[4];
uniform vec4 hlslcc_mtx4x4unity_MatrixVP[4];
uniform vec4 _MainTex_ST;
uniform vec4 _DetailAlbedoMap_ST;
uniform mediump float _UVSec;
in highp vec4 in_POSITION0;
in mediump vec3 in_NORMAL0;
in highp vec2 in_TEXCOORD0;
in highp vec2 in_TEXCOORD1;
out highp vec4 vs_TEXCOORD0;
out highp vec4 vs_TEXCOORD1;
out highp vec4 vs_TEXCOORD2;
out highp vec4 vs_TEXCOORD3;
out highp vec4 vs_TEXCOORD4;
out mediump vec4 vs_TEXCOORD5;
out highp vec4 vs_TEXCOORD7;
out highp vec3 vs_TEXCOORD8;
vec4 u_xlat0;
mediump vec4 u_xlat16_0;
bool u_xlatb0;
vec4 u_xlat1;
mediump float u_xlat16_2;
mediump vec3 u_xlat16_3;
float u_xlat12;
void main()
{
u_xlat0 = in_POSITION0.yyyy * hlslcc_mtx4x4unity_ObjectToWorld[1];
u_xlat0 = hlslcc_mtx4x4unity_ObjectToWorld[0] * in_POSITION0.xxxx + u_xlat0;
u_xlat0 = hlslcc_mtx4x4unity_ObjectToWorld[2] * in_POSITION0.zzzz + u_xlat0;
u_xlat0 = u_xlat0 + hlslcc_mtx4x4unity_ObjectToWorld[3];
u_xlat1 = u_xlat0.yyyy * hlslcc_mtx4x4unity_MatrixVP[1];
u_xlat1 = hlslcc_mtx4x4unity_MatrixVP[0] * u_xlat0.xxxx + u_xlat1;
u_xlat1 = hlslcc_mtx4x4unity_MatrixVP[2] * u_xlat0.zzzz + u_xlat1;
gl_Position = hlslcc_mtx4x4unity_MatrixVP[3] * u_xlat0.wwww + u_xlat1;
#ifdef UNITY_ADRENO_ES3
u_xlatb0 = !!(_UVSec==0.0);
#else
u_xlatb0 = _UVSec==0.0;
#endif
u_xlat0.xy = (bool(u_xlatb0)) ? in_TEXCOORD0.xy : in_TEXCOORD1.xy;
vs_TEXCOORD0.zw = u_xlat0.xy * _DetailAlbedoMap_ST.xy + _DetailAlbedoMap_ST.zw;
vs_TEXCOORD0.xy = in_TEXCOORD0.xy * _MainTex_ST.xy + _MainTex_ST.zw;
u_xlat0.xyz = in_POSITION0.yyy * hlslcc_mtx4x4unity_ObjectToWorld[1].xyz;
u_xlat0.xyz = hlslcc_mtx4x4unity_ObjectToWorld[0].xyz * in_POSITION0.xxx + u_xlat0.xyz;
u_xlat0.xyz = hlslcc_mtx4x4unity_ObjectToWorld[2].xyz * in_POSITION0.zzz + u_xlat0.xyz;
u_xlat0.xyz = hlslcc_mtx4x4unity_ObjectToWorld[3].xyz * in_POSITION0.www + u_xlat0.xyz;
vs_TEXCOORD1.xyz = u_xlat0.xyz + (-_WorldSpaceCameraPos.xyz);
vs_TEXCOORD8.xyz = u_xlat0.xyz;
vs_TEXCOORD1.w = 0.0;
vs_TEXCOORD2 = vec4(0.0, 0.0, 0.0, 0.0);
vs_TEXCOORD3 = vec4(0.0, 0.0, 0.0, 0.0);
u_xlat0.x = dot(in_NORMAL0.xyz, hlslcc_mtx4x4unity_WorldToObject[0].xyz);
u_xlat0.y = dot(in_NORMAL0.xyz, hlslcc_mtx4x4unity_WorldToObject[1].xyz);
u_xlat0.z = dot(in_NORMAL0.xyz, hlslcc_mtx4x4unity_WorldToObject[2].xyz);
u_xlat12 = dot(u_xlat0.xyz, u_xlat0.xyz);
u_xlat12 = inversesqrt(u_xlat12);
u_xlat0.xyz = vec3(u_xlat12) * u_xlat0.xyz;
vs_TEXCOORD4.xyz = u_xlat0.xyz;
vs_TEXCOORD4.w = 0.0;
u_xlat16_2 = u_xlat0.y * u_xlat0.y;
u_xlat16_2 = u_xlat0.x * u_xlat0.x + (-u_xlat16_2);
u_xlat16_0 = u_xlat0.yzzx * u_xlat0.xyzz;
u_xlat16_3.x = dot(unity_SHBr, u_xlat16_0);
u_xlat16_3.y = dot(unity_SHBg, u_xlat16_0);
u_xlat16_3.z = dot(unity_SHBb, u_xlat16_0);
vs_TEXCOORD5.xyz = unity_SHC.xyz * vec3(u_xlat16_2) + u_xlat16_3.xyz;
vs_TEXCOORD5.w = 0.0;
vs_TEXCOORD7 = vec4(0.0, 0.0, 0.0, 0.0);
return;
}
//#endif
运行malios调试
进入到malios.exe 对应的目录,然后在cmd中可以分析瓶颈
示例如下,
`C:\Users\rtorresb\Desktop\Tmp>malioc shader.vert
Mali Offline Compiler v7.1.0 (Build 7a3538)
Copyright 2007-2020 Arm Limited, all rights reserved
Configuration
=============
Hardware: Mali-G76 r0p0
Driver: Bifrost r19p0-00rel0
Shader type: OpenGL ES Vertex (inferred)
Main shader
===========
Work registers: 32
Uniform registers: 82
Stack spilling: False
A LS V T Bound
Total instruction cycles: 2.9 16.0 0.0 0.0 LS
Shortest path cycles: 2.9 16.0 0.0 0.0 LS
Longest path cycles: 2.9 16.0 0.0 0.0 LS
A = Arithmetic, LS = Load/Store, V = Varying, T = Texture
这个vert shader 计算的时钟周期是2.9,load/store的时钟周期是16.0 瓶颈是LS
fragment shader调试同理
用处和限制
Here are a few key lessons you can get from this post:
Everything counts towards performance: instructions, texture channels, variants. Everything.
You have a neat tool to measure the cost of your shaders
And more importantly, you can now compare shaders’ performance when in doubt
You are now a step closer to 60 FPS.
However, keep in mind:
These estimates greatly vary across architectures and even driver versions…
Yet, these metrics will be incredibly useful for your optimization journey
比较重要的一点是该工具只支持基于mali架构的处理器,而且只是粗略估计,线上的真是环境比如缓存什么的,它就无法模拟。
这篇关于调试安卓 gles性能瓶颈的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






