本文主要是介绍pytorch标准化与模型训练推理以及中间层注意点,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.图像归一化和通道转换操作
a = np.arange(3*3*3).reshape(3,3,3).astype(np.uint8)
print(a)
function = transforms.ToTensor()#注意只能转换3维度的ndarray或者PIL的Image类型
c = function(a)
print(c)'''
D:\anaconda3\python.exe E:\test\pythonProject\test.py
[[[ 0 1 2][ 3 4 5][ 6 7 8]][[ 9 10 11][12 13 14][15 16 17]][[18 19 20][21 22 23][24 25 26]]]
tensor([[[0.0000, 0.0118, 0.0235],[0.0353, 0.0471, 0.0588],[0.0706, 0.0824, 0.0941]],[[0.0039, 0.0157, 0.0275],[0.0392, 0.0510, 0.0627],[0.0745, 0.0863, 0.0980]],[[0.0078, 0.0196, 0.0314],[0.0431, 0.0549, 0.0667],[0.0784, 0.0902, 0.1020]]])进程已结束,退出代码为 0
'''注意: transforms.ToTensor()#注意只能转换3维度的ndarray或者PIL的Image类型的数据,源数据类型必须为uint8。
transforms.ToTensor()的作用是把RGB拆分为三通道R,G,B,然后再把每个数除以 255 归一化。
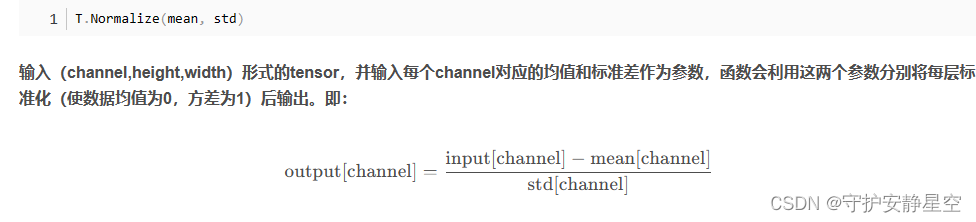
2.Normalize
a = np.arange(3*3*3).reshape(3,3,3).astype(np.float32)
b = torch.from_numpy(a)
trans1_5 = transforms.Normalize(mean=1,std=0.5)
trans3_3 = transforms.Normalize(mean=(1,2,3),std=(1,2,1))
print(a)
c = trans1_5(b)
d = trans3_3(b)
print(c)
print(d)'''
D:\anaconda3\python.exe E:\test\pythonProject\test.py
[[[ 0. 1. 2.][ 3. 4. 5.][ 6. 7. 8.]][[ 9. 10. 11.][12. 13. 14.][15. 16. 17.]][[18. 19. 20.][21. 22. 23.][24. 25. 26.]]]
tensor([[[-2., 0., 2.],[ 4., 6., 8.],[10., 12., 14.]],[[16., 18., 20.],[22., 24., 26.],[28., 30., 32.]],[[34., 36., 38.],[40., 42., 44.],[46., 48., 50.]]])
tensor([[[-1.0000, 0.0000, 1.0000],[ 2.0000, 3.0000, 4.0000],[ 5.0000, 6.0000, 7.0000]],[[ 3.5000, 4.0000, 4.5000],[ 5.0000, 5.5000, 6.0000],[ 6.5000, 7.0000, 7.5000]],[[15.0000, 16.0000, 17.0000],[18.0000, 19.0000, 20.0000],[21.0000, 22.0000, 23.0000]]])进程已结束,退出代码为 0'''注意:transforms.Normalize() 转换的参数必须是float类型的tensor,当数据为3通道的时候输入的 MEAN和STD参数为列表或者三个数的元组时,是每个通道分别做上面公式的运算,从以上代码,以及打印数据可以看出来。
3.批标准化层
transforms.Normalize() transforms.Totensor()函数基本上都是在图像预处理阶段使用,他们都集成在 torchvision 这个库里面,而批标准化层一般在多层网络结构中都会使用它集成在 nn 模块里面,批标准化主要是为了解决梯度消失,加速收敛速度及稳定性的算法,经过批标准化,模型的形状是不变的,BatchNorm后是不改变输入的shape的;
nn.BatchNorm1d: N * d --> N * d
nn.BatchNorm2d: N * C * H * W -- > N * C * H * W
nn.BatchNorm3d: N * C * d * H * W --> N * C * d * H * W
我们常用的是 BatchNorm1d 和 BatchNorm2d,对于BatchNorm其主要参数为:
nn.BatchNorm1d(num_features, eps=1e-05, momentum=0.1, affine=True,track_running_stats=True, device=None, dtype=None)主要参数介绍:
num_features: 输入维度,也就是数据的特征维度;
eps: 是在分母上加的一个值,是为了防止分母为0的情况,让其能正常计算;
affine: 是仿射变化,将![]() 分别初始化为1和0;
分别初始化为1和0;
BatchNorm1d具体计算方式:


torch.var()函数的参数 unbiased 为 True 则执行样本方差,unbiased 为 False 则执行母体方差(书本上教学的方差,正常理解的方差)。torch.std(),为计算标准差。
(1)BatchNorm1d计算方式
t = torch.arange(6,dtype=torch.float32).view(2,3)
print("t",t)
print('----------------------------------')
me = t.mean(0)
print("t.mean",me)
print('----------------------------------')
print("t.var",t.var(0,False))#执行正常理解的方差
print('----------------------------------')
sq = torch.sqrt(t.var(0,False)+1e-5)
print("t.sqrt",sq)
print('----------------------------------')
x = (t-me)
print("t-me",x )
print('----------------------------------')
y = x/sq
print("x/sq",y )
print('----------------------------------')
bn1d = torch.nn.BatchNorm1d(3,1e-5,0.1,True,True,None,None)
print("weight:",bn1d.weight,"\r\n","bias:",bn1d.bias)
print('----------------------------------')
bnout = bn1d(t)
print("bnout:",bnout)
print('----------------------------------')'''
D:\anaconda3\python.exe E:\test\pythonProject\test.py
t tensor([[0., 1., 2.],[3., 4., 5.]])
----------------------------------
t.mean tensor([1.5000, 2.5000, 3.5000])
----------------------------------
t.var tensor([2.2500, 2.2500, 2.2500])
----------------------------------
t.sqrt tensor([1.5000, 1.5000, 1.5000])
----------------------------------
t-me tensor([[-1.5000, -1.5000, -1.5000],[ 1.5000, 1.5000, 1.5000]])
----------------------------------
x/sq tensor([[-1.0000, -1.0000, -1.0000],[ 1.0000, 1.0000, 1.0000]])
----------------------------------
weight: Parameter containing:
tensor([1., 1., 1.], requires_grad=True) bias: Parameter containing:
tensor([0., 0., 0.], requires_grad=True)
----------------------------------
bnout: tensor([[-1.0000, -1.0000, -1.0000],[ 1.0000, 1.0000, 1.0000]], grad_fn=<NativeBatchNormBackward0>)
----------------------------------进程已结束,退出代码为 0
'''注意: BatchNorm1d在模型训练模式的时候至少需要提供两组参数,在模型预测模式可以提供一组参数,在模型训练模式的时候至少需要提供两组参数组成2维的参数,因为训练的时候要根据两组参数来计算。BatchNorm1d平均值mean是按照列求的,目的是求这个批次的均值。
官方说明翻译:
将批量归一化应用于4D输入(具有额外通道维度的小批量2D输入),如论文《批量归一化:通过减少内部协变量偏移加速深度网络训练》中所述。
y = (x − E[x])/(√(Var[x] + ϵ))*γ + β
平均值和标准偏差是在小批量的每个维度上计算的,γ和β是大小为C的可学习参数向量(其中C是输入大小)。默认情况下,γ的元素设置为1,而β的元素则设置为0。在前向通道的训练时间,通过有偏估计器计算标准偏差,等效于torc.var(输入,无偏=False)。然而,存储在标准偏差移动平均值中的值是通过无偏估计器计算的,相当于torc.var(输入,无偏=True)。
同样在默认情况下,在训练过程中,该层保持对其计算的平均值和方差的估计,然后在评估过程中用于归一化。运行估计值保持0.1的默认动量。
如果track_running_stats设置为False,则该层不保持运行估计,而是在评估期间使用批统计信息。
笔记
这个动量论点不同于优化器类中使用的动量论点和动量的传统概念。从数学上讲,这里运行统计数据的更新规则是新的 = 1. − 推进力 × x + 推进力 × xt,其中x是估计的统计量,xt是新的观测值。
由于批处理规范化是在C维度上完成的,计算(N,H,W)切片的统计信息,因此称之为“空间批处理规范”是一个常见的术语。(1)BatchNorm2d计算方式
t = torch.arange(2*3*3*3,dtype=torch.float32).view(2,3,3,3)#生成tensor数据
print("t",t)
bn1d = torch.nn.BatchNorm2d(3,1e-5,0.1,True,True,None,None)
print("weight:",bn1d.weight,"\r\n","bias:",bn1d.bias)
print('----------------------------------')
bnout = bn1d(t)
print("bnout:",bnout)
print('----------------------------------')#取出来第二通道数据
x = [9., 10., 11.,12., 13., 14.,15., 16., 17.,36., 37., 38.,39., 40., 41.,42., 43., 44.]
x = np.array(x)
mean = x.mean()
print("mean",mean)
out = (x-mean)/np.sqrt(x.var()+1e-5)
print("out",out.reshape(2,3,3))
# x.var() 这个是求方差
# x.std() 这个是求标准差
# print(x.std(),x.var())'''
D:\anaconda3\python.exe E:\test\pythonProject\test.py
t tensor([[[[ 0., 1., 2.],[ 3., 4., 5.],[ 6., 7., 8.]],[[ 9., 10., 11.],[12., 13., 14.],[15., 16., 17.]],[[18., 19., 20.],[21., 22., 23.],[24., 25., 26.]]],[[[27., 28., 29.],[30., 31., 32.],[33., 34., 35.]],[[36., 37., 38.],[39., 40., 41.],[42., 43., 44.]],[[45., 46., 47.],[48., 49., 50.],[51., 52., 53.]]]])
weight: Parameter containing:
tensor([1., 1., 1.], requires_grad=True) bias: Parameter containing:
tensor([0., 0., 0.], requires_grad=True)
----------------------------------
bnout: tensor([[[[-1.2732, -1.2005, -1.1277],[-1.0550, -0.9822, -0.9094],[-0.8367, -0.7639, -0.6912]],[[-1.2732, -1.2005, -1.1277],[-1.0550, -0.9822, -0.9094],[-0.8367, -0.7639, -0.6912]],[[-1.2732, -1.2005, -1.1277],[-1.0550, -0.9822, -0.9094],[-0.8367, -0.7639, -0.6912]]],[[[ 0.6912, 0.7639, 0.8367],[ 0.9094, 0.9822, 1.0550],[ 1.1277, 1.2005, 1.2732]],[[ 0.6912, 0.7639, 0.8367],[ 0.9094, 0.9822, 1.0550],[ 1.1277, 1.2005, 1.2732]],[[ 0.6912, 0.7639, 0.8367],[ 0.9094, 0.9822, 1.0550],[ 1.1277, 1.2005, 1.2732]]]], grad_fn=<NativeBatchNormBackward0>)
----------------------------------
mean 26.5
out [[[-1.27321838 -1.20046305 -1.12770771][-1.05495237 -0.98219704 -0.9094417 ][-0.83668637 -0.76393103 -0.69117569]][[ 0.69117569 0.76393103 0.83668637][ 0.9094417 0.98219704 1.05495237][ 1.12770771 1.20046305 1.27321838]]]进程已结束,退出代码为 0
'''以上代码的通道2,bn计算后的值和np按照公式计算出来的值一样。
注意:BatchNorm2d的均值是按照通道内所有数据求和除以个数得来的,比如(b,c,w,h),求通道一的均值,把 b 批次内所有通道1数据全部加起来除以个数求mean均值,其他通道类似,每个通道互不干扰。
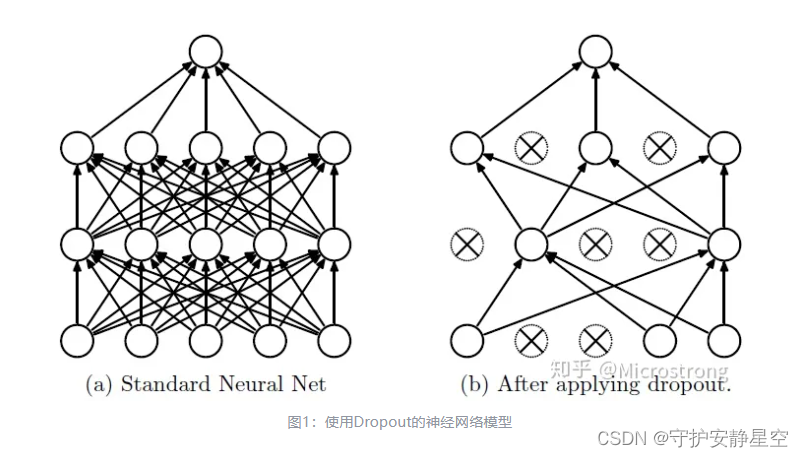
4.Dropout
当一个复杂的前馈神经网络被训练在小的数据集时,容易造成过拟合。为了防止过拟合,可以通过阻止特征检测器的共同作用来提高神经网络的性能。Dropout会随机选取一些张量置为0,阻止梯度向后传播,是为了减少张量之间的依赖关系,让模型学到更多特征。
t = torch.arange(6,dtype=torch.float32).view(1,-1,3)
print(t)
dp = torch.nn.Dropout1d(0.5)
dpt = dp(t)
print(dpt)'''
D:\anaconda3\python.exe E:\test\pythonProject\test.py
tensor([[[0., 1., 2.],[3., 4., 5.]]])
tensor([[[0., 2., 4.],[0., 0., 0.]]])进程已结束,退出代码为 0
'''Dropout1d支持2维和3维输入 ,随机置0输入,不置0的输入变为,输入/Dropout1d概率 ,置0输入可以让梯度不往后面再进行传输。
t = torch.arange(27,dtype=torch.float32).view(1,3,3,3)
print(t)
dp = torch.nn.Dropout2d(0.5)
dpt = dp(t)
print(dpt)'''
D:\anaconda3\python.exe E:\test\pythonProject\test.py
tensor([[[[ 0., 1., 2.],[ 3., 4., 5.],[ 6., 7., 8.]],[[ 9., 10., 11.],[12., 13., 14.],[15., 16., 17.]],[[18., 19., 20.],[21., 22., 23.],[24., 25., 26.]]]])
tensor([[[[ 0., 2., 4.],[ 6., 8., 10.],[12., 14., 16.]],[[ 0., 0., 0.],[ 0., 0., 0.],[ 0., 0., 0.]],[[36., 38., 40.],[42., 44., 46.],[48., 50., 52.]]]])进程已结束,退出代码为 0
'''Dropout2d支持4维的输入(bach,c,w,h),随机置 0 某个通道 ,不置0的输入变为,输入/Dropout1d概率 ,置0输入可以让梯度不往后面再进行传输。
注意: Dropout 是在模型训练的时候才起作用,在模型预测的时候不起作用,BatchNorm在训练的时候会优化自己的参数,在预测模式时候保持权重和偏置参数不变,会使 输出数值 = 输入*weight + bias ,所以在不同使用场景要设置模型为不同的模式。
模型训练模式和预测模式调用以下函数改变状态:
model.train()#模型处于训练模式
model.eval()#模型处于预测模式注意:模型训练模式和推理模式设置只影响 dropout层和BatchNorm层,对其他层没有影响,在训练模式的时候dropout层有效,在推理模式dropout层无效。BatchNorm层在训练模式按照公式计算,在推理模式直接用 输入*weight+bias = 输出 (具体参数计算上面代码和运行输出有相关示例),我们在做推理的时候需要设置 with torch.no_grad(): 不计算梯度 和 model.eval() 模型推理模式。图像预处理的相关转换都在 torchvision.transforms 这个模块里面。dropout和BatchNorm在torch.nn这个模块里面。
这篇关于pytorch标准化与模型训练推理以及中间层注意点的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







