本文主要是介绍带你学【自动控制原理】(四)-->第二章:控制系统的结构图及其等效变换、信号流图、传递函数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
声明:本人大学《自动控制原理》课程为全专业唯一一个满分!!!考研专业课分数145分(某985专业课),对于自控方面的知识掌握较为全面。
当然,本人水平毕竟有限,博客可能存在部分错误的地方,请广大读者谅解并向本人反馈错误。
本专栏博客参考书籍为卢京潮老师的《自动控制原理》


一、 结构图
系统结构图是描述组成系统的各元部件之间信号传递关系的图形化数学模型。
建立系统结构图一般有两种方法。
1、在已知系统微分方程组的条件下,将方程组中各子方程分别进行拉氏变换,绘出各子方程对应的子结构图,将子结构图连接便可获得系统的结构 图。
2、在得到系统方框图的条件下,将每个方框中的元部件名称换成其相应的传递函数,并将所有变量用相应的拉氏变换形式表示,就转换成系统的结构图。
二、 结构图等效变换
结构图是从具体系统中抽象出来的数学图形,建立结构图的目的是为了求取系统的传递函数。当只讨论系统的输入、输出特性,而不考虑它的具体结构时,完全可以对其进行必要的变换,当然,这种变换必须是“等效的”,应使变换前、后输入与输出量之间的传递函数保持不变。下面依据等效原理推导结构图变换的一般法则。
2.1 串联环节的传递函数
下图是两个环节的串联:
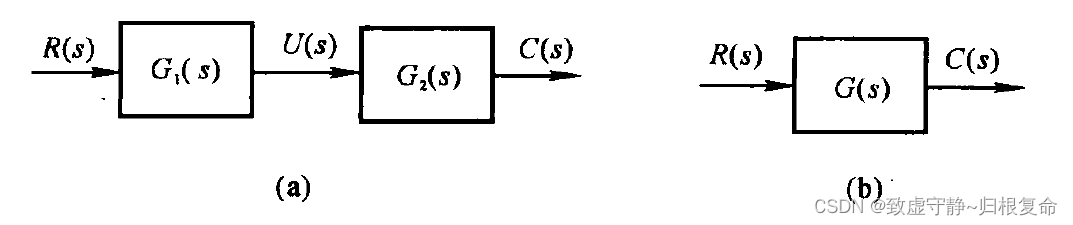
上图(a)可以写出: C ( s ) = G 2 ( s ) U ( s ) = G 2 ( s ) G 1 ( s ) R ( s ) C(s)=G_2(s)U(s)=G_2(s)G_1(s)R(s) C(s)=G2(s)U(s)=G2(s)G1(s)R(s) ,所以两个环节串联后的等效传递函数 G ( s ) = C ( s ) R ( s ) = G 2 ( s ) G 1 ( s ) G(s)=\frac{C(s)}{R(s)}=G_2(s)G_1(s) G(s)=R(s)C(s)=G2(s)G
这篇关于带你学【自动控制原理】(四)-->第二章:控制系统的结构图及其等效变换、信号流图、传递函数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








