本文主要是介绍【Chrono Engine学习总结】4-vehicle-4.1-vehicle的基本概念,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
由于Chrono的官方教程在一些细节方面解释的并不清楚,自己做了一些尝试,做学习总结。
1、基本介绍
Vehicle Overview
Vehicle Mannel
Vehicle的官方demo
1.1 Vehicle的构型
- 一个车辆由许多子系统构成:悬挂、转向、轮子/履带、刹车/油门、动力传统系统(driverline)。
- Chrono提供了一些典型的车辆模型,例如:悍马车、小型轿车等 vehicle models,只需要直接代码选定即可;
- 如果不用官方的车型,就需要自己定义各种子系统。chono提供一些典型的子系统构型,例如悬挂包括:双横臂、前麦花臣支柱等 悬挂类型,转向包括:转向垂臂( Pitman arm)等转向类型。
- 如果连官方的子系统都不想用,就需要自己定义一些弹簧/轴的连接,就复杂一些,一般采用JSON文件的方式,这样比较清晰明了。
1.2 Vehicle部分仿真的逻辑
https://api.projectchrono.org/vehicle_overview.html#vehicle_simulation_loop
每一步仿真时,依次执行:获取系统输出、同步各个系统(synchronize system)、系统动力学仿真前进一步(advance system)。
- 在各个系统同步时,可能不仅包括vehicle的模块,还包括可视化等多个模块,同时vehicle部分需要同步:驾驶控制器、地型交互、车体、可视化等模块,如有。
- 在同步之后,进行advance操作,前进一步。
正因为如此,在仿真代码中,每次loop最后会有这么两段:
// Update modules (process inputs from other modules
driver->Synchronize(time);
terrain.Synchronize(time);
hmmwv.Synchronize(time, driver_inputs, terrain);
vis->Synchronize(time, driver_inputs);
// Advance simulation for one timestep for all modules
driver->Advance(step_size);
terrain.Advance(step_size);
hmmwv.Advance(step_size);
vis->Advance(step_size);
1.3 vehicle的可视化
Vehicle的可视化与之前的整体仿真环境的可视化有些相同,但不完全相同。相同之处是,是选用irrlicht、还是OpenGL、还是离线POV-Ray可视化。我这里采用irrlicht。
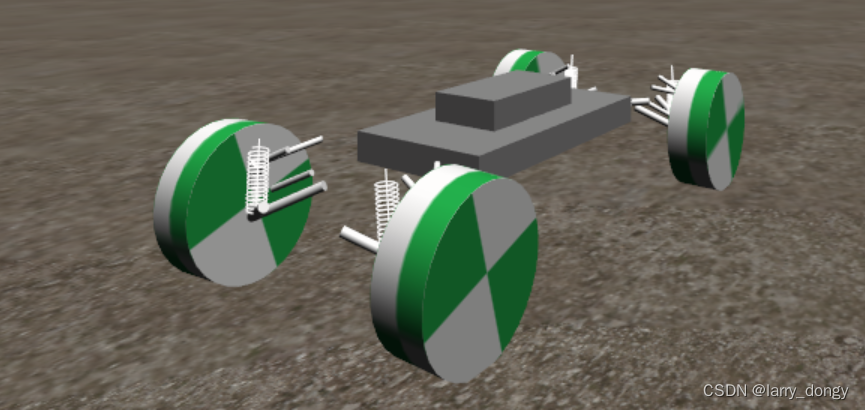
除此之外,由于vehicle包括很多子模块,例如地盘、悬挂、轮胎等,在仿真时可以选择是否进行显示。一般显示方式为三种:不显示(VisualizationType::None)、显示基础结构(PRIMITIVES)、显示完整表面mesh(MESH)。例如,地盘、悬挂、转向、轮胎、外壳,全部显示MESH和只显示基础结构分别是这样的:

2. 车辆控制系统
2.1 控制系统基础概念
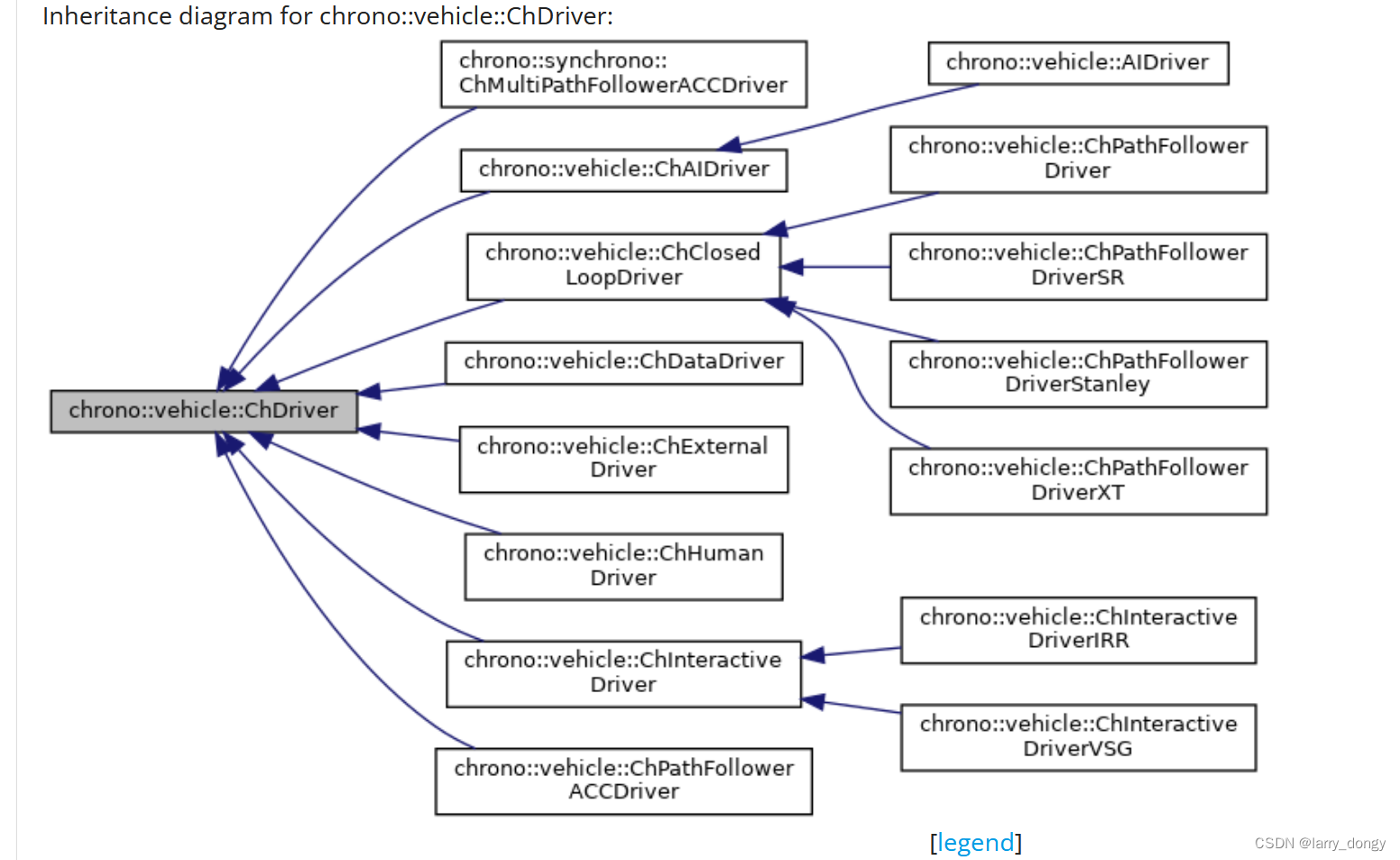
车辆控制系统在chrono里面称作“driver”,ChDriver。
对于车辆的控制,主要控制量只有两个:油门throttle(和刹车brake)、转向(steering 左/右)。
控制系统包括:交互控制ChIteractiveDriver、闭环控制ChClosedLoopDriver、AI Driver等多种方式,每个模块的控制代码写法不同。这里暂不展开介绍。
2.2 交互控制系统
这里采用较为简单的交互控制。交互控制通过可视化模块获取来自键盘的输入控制量,通过WSAD分别控制:加油门、刹车、左转向、右转向。需要注意,在开启交互控制前,需要按键j启动键盘控制,否则无效(注意是否关闭了中文输入法)。
交互系统部分的代码是这样的:
DriverInputs driver_inputs = driver->GetInputs();
之后,在调用driver->Advance函数时,即对车辆的控制量进行更新。
需要注意的是,在交互控制中,每次按键改变的是上述控制量的增量,即按一下油门,油门会增大一些。因此,并不是直接控制的速度,所以在操作时,需要练习手感。
在程序运行时,右上角会显示控制量和车辆状态:
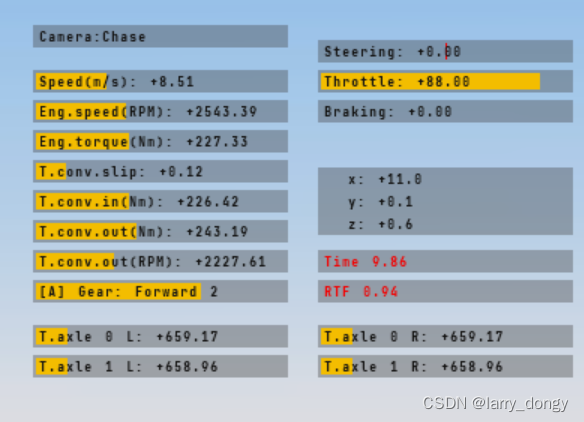
可以看出,此时的油门是+88(油门控制量默认是0-100),刹车是0(通过按键S将油门在减为0后,刹车会上来),此时车速是8.51m/s,以及一些其他参数。
3、官方例子
这次以官方例子进行介绍:
#include "chrono/core/ChStream.h"
#include "chrono/utils/ChUtilsInputOutput.h"
#include "chrono/utils/ChFilters.h"
#include "chrono_vehicle/ChConfigVehicle.h"
#include "chrono_vehicle/ChVehicleModelData.h"
#include "chrono_vehicle/terrain/RigidTerrain.h"
#include "chrono_vehicle/output/ChVehicleOutputASCII.h"
#include "chrono_models/vehicle/hmmwv/HMMWV.h"
#include "chrono_thirdparty/filesystem/path.h"
#include "chrono_vehicle/driver/ChInteractiveDriverIRR.h"
#include "chrono_vehicle/wheeled_vehicle/ChWheeledVehicleVisualSystemIrrlicht.h"
#include <iostream>using namespace chrono;
using namespace chrono::irrlicht;
using namespace chrono::vehicle;
using namespace chrono::vehicle::hmmwv;// Simulation step sizes
double step_size = 1e-3;
double tire_step_size = step_size;
double t_end = 1000;// Time interval between two render frames
double render_step_size = 1.0 / 50; // FPS = 50int main(int argc, char* argv[]) {chrono::SetChronoDataPath("E:/codeGit/chrono/chrono/build/data/"); // change the default data loading path.chrono::vehicle::SetDataPath("E:/codeGit/chrono/chrono/build/data/vehicle/"); // change the vehicle data pathChContactMethod contact_method = ChContactMethod::SMC; // 设定碰撞类型// Create the HMMWV vehicle, set parameters, and initialize// 创建一个HMMWV车,注意如果有vehicle模块,则不需要重新定义一个物理系统,这个vehicle自带一个系统,可以直接给别的模块调用。HMMWV_Full hmmwv;hmmwv.SetCollisionSystemType(ChCollisionSystem::Type::BULLET);hmmwv.SetContactMethod(contact_method);hmmwv.SetChassisCollisionType(CollisionType::NONE);hmmwv.SetChassisFixed(false);hmmwv.SetInitPosition(ChCoordsys<>({ 0, 0, 0.5 }, { 1, 0, 0, 0 }));hmmwv.SetEngineType(EngineModelType::SHAFTS);hmmwv.SetTransmissionType(TransmissionModelType::SHAFTS);hmmwv.SetDriveType(DrivelineTypeWV::AWD);hmmwv.UseTierodBodies(true);hmmwv.SetSteeringType(SteeringTypeWV::PITMAN_ARM);hmmwv.SetBrakeType(BrakeType::SHAFTS);hmmwv.SetTireType(TireModelType::PAC02);hmmwv.SetTireStepSize(tire_step_size);hmmwv.Initialize();// Visualization type for vehicle parts (PRIMITIVES, MESH, or NONE)// 设置车辆各个模块的可视化程度。VisualizationType chassis_vis_type = VisualizationType::PRIMITIVES;VisualizationType suspension_vis_type = VisualizationType::PRIMITIVES;VisualizationType steering_vis_type = VisualizationType::PRIMITIVES;VisualizationType wheel_vis_type = VisualizationType::PRIMITIVES;VisualizationType tire_vis_type = VisualizationType::PRIMITIVES;hmmwv.SetChassisVisualizationType(chassis_vis_type);hmmwv.SetSuspensionVisualizationType(suspension_vis_type);hmmwv.SetSteeringVisualizationType(steering_vis_type);hmmwv.SetWheelVisualizationType(wheel_vis_type);hmmwv.SetTireVisualizationType(tire_vis_type);// Create the terrain 创建地形,并设置地形的一些物理参数。RigidTerrain terrain(hmmwv.GetSystem());ChContactMaterialData minfo;minfo.mu = 0.9f;minfo.cr = 0.01f;minfo.Y = 2e7f;auto patch_mat = minfo.CreateMaterial(contact_method);// Rigid terraindouble terrainHeight = 0; // terrain height (FLAT terrain only)double terrainLength = 200.0; // size in X directiondouble terrainWidth = 200.0; // size in Y directionstd::shared_ptr<RigidTerrain::Patch> patch;patch = terrain.AddPatch(patch_mat, CSYSNORM, terrainLength, terrainWidth);patch->SetTexture(vehicle::GetDataFile("terrain/textures/dirt.jpg"), 200, 200);patch->SetColor(ChColor(0.8f, 0.8f, 0.5f));terrain.Initialize();// 创建基于irrlicht的可视化,以及交互控制系统。定义每次控制量、可hi话等内容。// ------------------------------------------------------------------------------// Create the vehicle run-time visualization interface and the interactive driver// ------------------------------------------------------------------------------// Set the time response for steering and throttle keyboard inputs.double steering_time = 1.0; // time to go from 0 to +1 (or from 0 to -1)double throttle_time = 1.0; // time to go from 0 to +1double braking_time = 0.3; // time to go from 0 to +1std::shared_ptr<ChVehicleVisualSystem> vis;std::shared_ptr<ChDriver> driver;// Create the vehicle Irrlicht interfaceauto vis_irr = chrono_types::make_shared<ChWheeledVehicleVisualSystemIrrlicht>(); //~ ChWheeled这个类继承了可视化的基类vis_irr->SetWindowTitle("HMMWV Demo");vis_irr->SetChaseCamera({ 0.0, 0.0, 1.75 }, 6.0, 0.5); // 将可视化的“相机位置”和车底盘上一点绑定。vis_irr->Initialize();vis_irr->AddLightDirectional();vis_irr->AddSkyBox();vis_irr->AddLogo();vis_irr->AttachVehicle(&hmmwv.GetVehicle()); // 将可视化与vehicle绑定// Create the interactive Irrlicht driver system 自定义每次按键的增量auto driver_irr = chrono_types::make_shared<ChInteractiveDriverIRR>(*vis_irr);driver_irr->SetSteeringDelta(render_step_size / steering_time);driver_irr->SetThrottleDelta(render_step_size / throttle_time);driver_irr->SetBrakingDelta(render_step_size / braking_time);driver_irr->Initialize();vis = vis_irr;driver = driver_irr;// ---------------// Simulation loop// ---------------// Number of simulation steps between miscellaneous eventsint render_steps = (int)std::ceil(render_step_size / step_size);// Initialize simulation frame countersint step_number = 0;int render_frame = 0;hmmwv.GetVehicle().EnableRealtime(true);while (vis->Run()) {double time = hmmwv.GetSystem()->GetChTime();// End simulationif (time >= t_end)break;// Render scene and output post-processing dataif (step_number % render_steps == 0) {vis->BeginScene();vis->Render();vis->EndScene();render_frame++;}// Driver inputsDriverInputs driver_inputs = driver->GetInputs();// Update modules (process inputs from other modules)driver->Synchronize(time);terrain.Synchronize(time);hmmwv.Synchronize(time, driver_inputs, terrain);vis->Synchronize(time, driver_inputs);// Advance simulation for one timestep for all modulesdriver->Advance(step_size);terrain.Advance(step_size);hmmwv.Advance(step_size);vis->Advance(step_size); //~ 更新vis的trackpoint等。// Increment frame numberstep_number++;std::cout << "Step: " << step_number << std::endl;}return 0;}
}
运行这个例子,就可以用WASD控制悍马车在自定义的一个地形上开动了。
这篇关于【Chrono Engine学习总结】4-vehicle-4.1-vehicle的基本概念的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






