本文主要是介绍【GAMES101】Lecture 19 相机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
相机
视场 Field of View (FOV)
曝光(Exposure)
感光度(ISO)
光圈
快门
相机
成像可以通过我们之前学过的光栅化成像和光线追踪成像来渲染合成,也可以用相机拍摄成像
今天就来学习一下相机是如何成像的,就是研究相机的构造结构

成像有这个小孔成像和透镜成像,小孔成像即针孔相机,无法做景深虚化,我们之前的光线追踪用的就是针孔相机的模型

镜头往里是快门(shutter),快门用于控制光进入传感器的时间,也就是控制曝光时间

然后里面就是这个传感器(sensor),记录在曝光时间内进入的光

如果传感器没有透镜的话,那么传感器上每个像素点记录的光都来着物体所有点的光,那记录的值都是差不多一样的了

视场 Field of View (FOV)
这个视场FOV指的是一个角度,可以用来衡量相机拍摄到场景的范围,这个传感器的尺寸为h,那么传感器到透镜或者说针孔的小孔的距离为焦距f,那么根据相似三角形原理这个FOV的正切值tan就等于f/2h
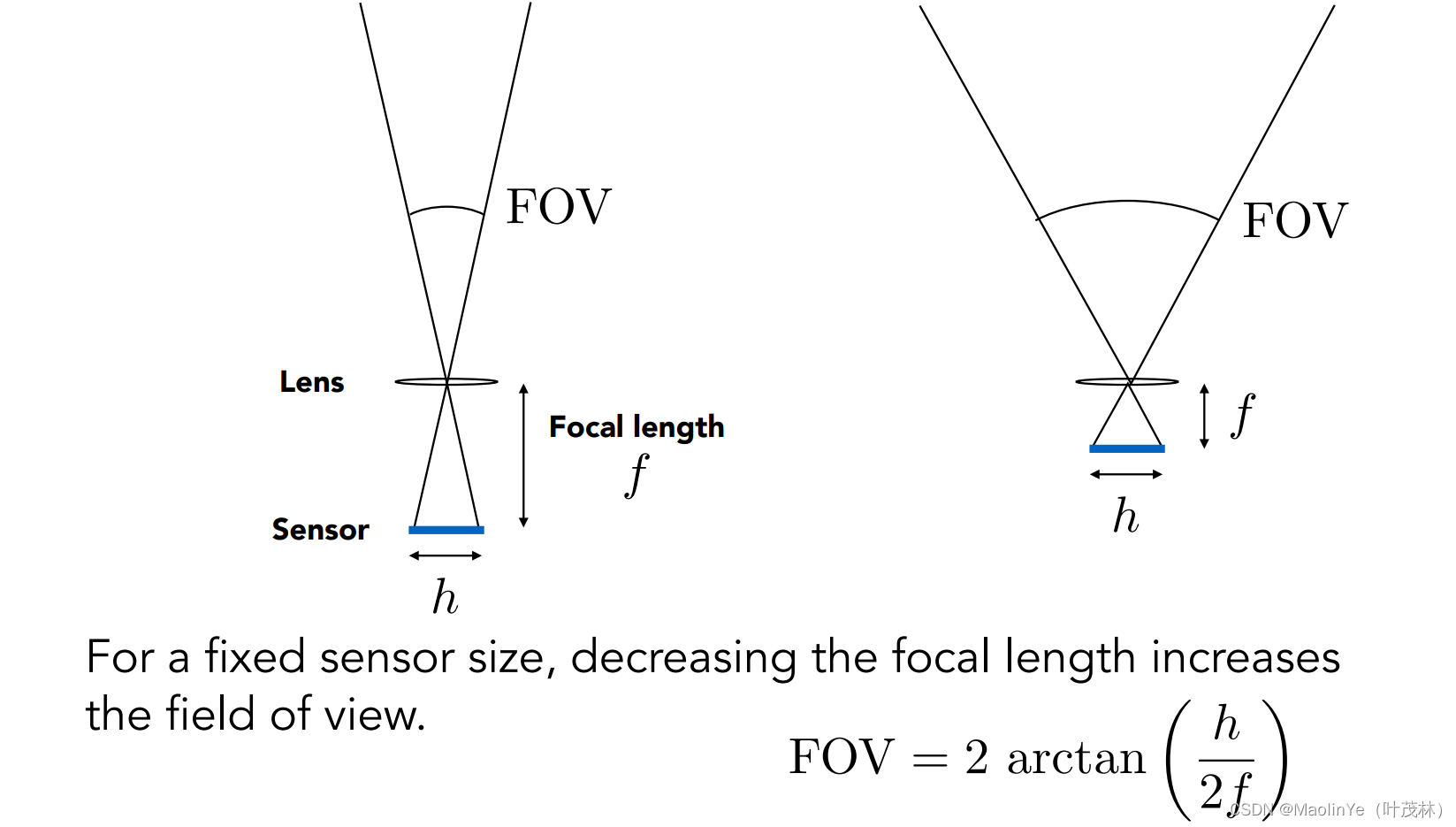
固定传感器的大小为35mm,那么就可以通过焦距来衡量FOV,焦距越小这个视场就越大,像这个焦距17mm就是一个广角
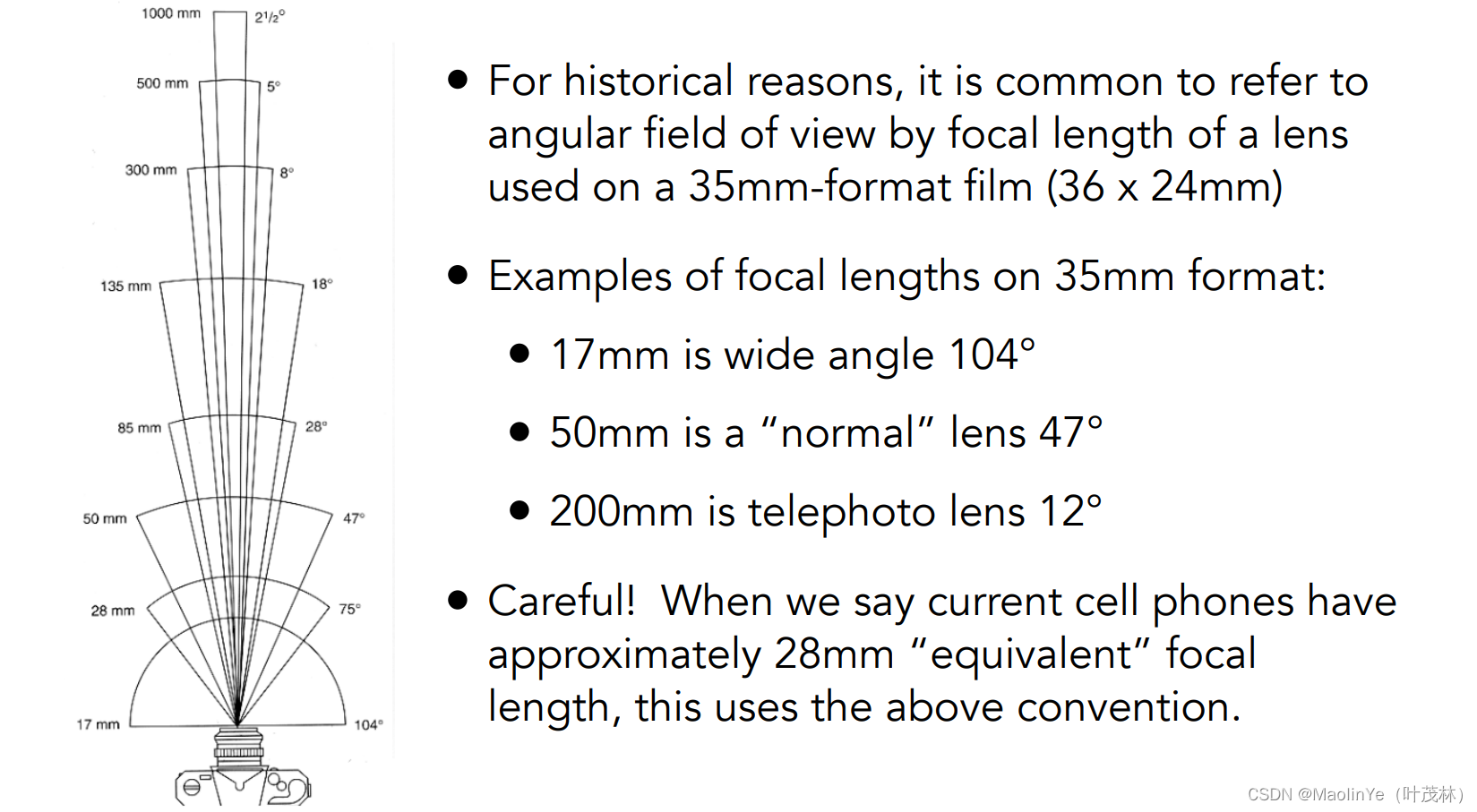
像这个手机,它的本身机身厚度限制了相机它的焦距的大小,那可以通过装尺寸更小的传感器来保持相同的FOV

曝光(Exposure)
这个曝光H=T×E,这个T就是曝光的时间,E是单位面积上通过的光通量irradiance,这个曝光时间是由快门控制的,这个irradiance通过光圈大小和焦距控制

感光度(ISO)
这个感光度是一个像素值的放大率,这个可以在传感器上改变光感灵敏度或者后期成像直接将数值乘以某个系数实现,但这个增大感光度它是全部放大,也就是说噪声也会更加明显

光圈
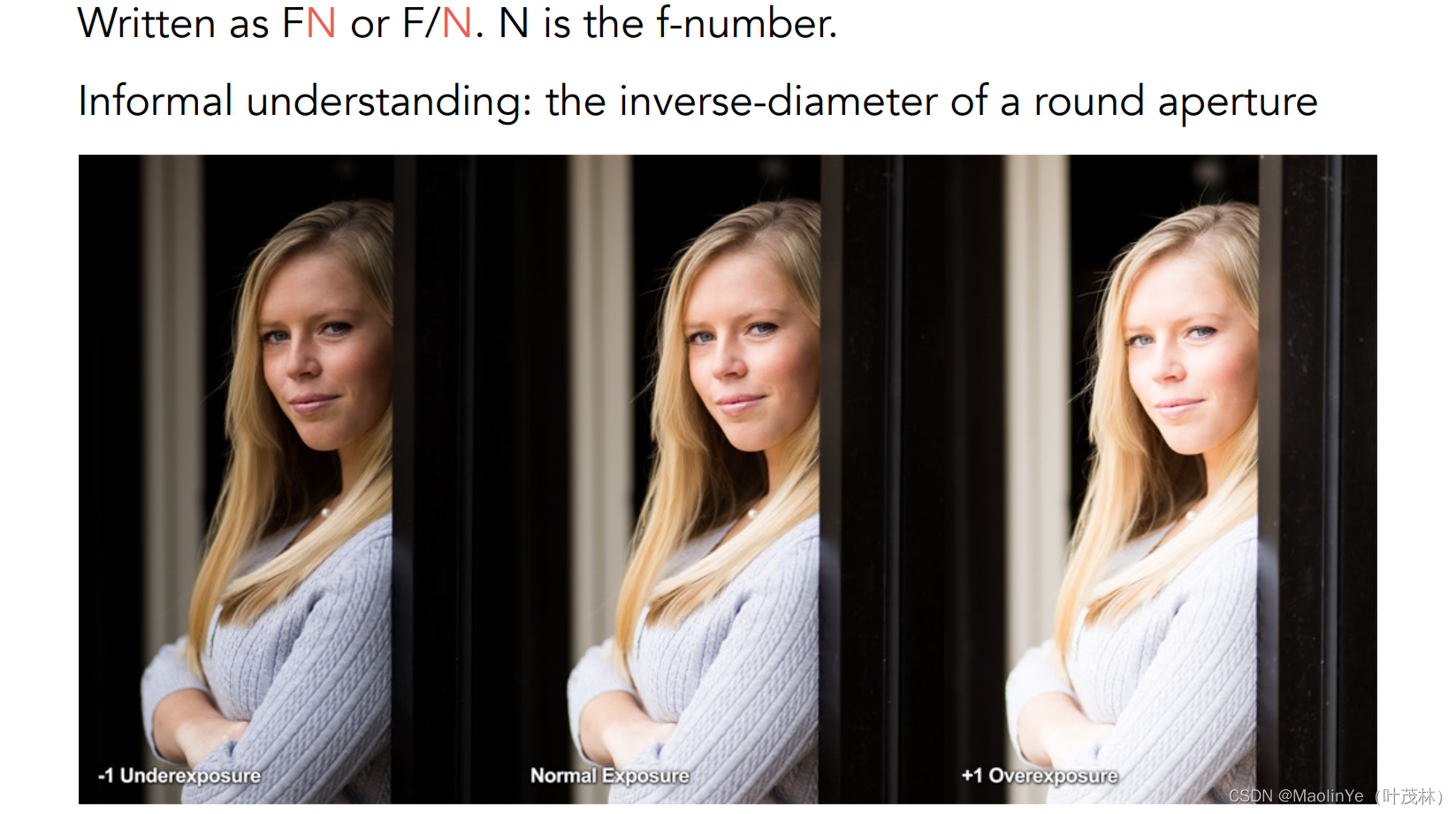
这个光圈就是用来控制进入传感器的光的多少的,用一个F数来衡量

这个F数,或者叫F-Stop,不这么准确的描述是指这个光圈直径的倒数
快门
快门控制光进入传感器的时间,快门是一个机械装置,就是一个上下弹射的门,它开门的时间就是快门速度

对于一个运动的物体,如果快门速度很慢,像这个1/2,就是0.5秒,它会有这么一种模糊的感觉,为什么呢?这是因为这个物体本身在移动的话,那快门保持打开的时间内进入了物体移动的光,再经过传感器平均就会产生模糊的感觉

但是这个模糊有时候是需要的,因为从人的视觉来看,模糊给人一种动态的感觉

但是这个快门毕竟是机械装置,再快它始终有一个时间的限制,当物体移动的速度很快,物体上不同位置出来的光到达传感器的时间不同时就会出现扭曲的现象

这样就可以通过调整这个光圈和快门速度来到达基本相同的曝光度,但是相同的曝光度得到的照片不一定一样,因为这个光圈大 的时候可以得到景深的效果,而快门速度慢的时候可以得到运动模糊

那这样通过极快的开门速度加上大光圈或者高ISO就可以实现高速摄影,这样就可以在很短的时间内拍摄很多帧

同样用小光圈加上很长的曝光时间就可以实现延时摄影,称为拉丝
这篇关于【GAMES101】Lecture 19 相机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








