本文主要是介绍基于动态阈值算法的黎明和黄昏时间海雾检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
黎明和黄昏海雾检测
- 一、概述
- 1.存在的问题
- 2.提出的方法
- 3.数据集
- 4.对比的算法
- 二、详细步骤
- 1.研究区域
- 2.动态阈值算法
- (1)光谱特征与太阳天顶角变化关系
- (2)算法构造
- (3)算法流程
- 3.实验
- 三、总结
参考文章:SEA FOG DETECTION BASED ON DYNAMIC THRESHOLD ALGORITHM AT DAWN AND DUSK TIM
一、概述
1.存在的问题
在黎明和黄昏时间时海雾的高发期,其对全天的海雾检测有重要的意义。
但是由于大多数的极地轨道卫星会受到时间分辨率和过境时间的影响,不能针对某一区域进行黎明和黄昏的海雾检测。
2.提出的方法
通过运用葵花8号卫星数据,分析海雾在黎明和黄昏的亮温和反射率变化,选择敏感波段,设定海雾的检测指标和动态阈值。
提出动态阈值法,有效检测黎明和黄昏海雾。
3.数据集
葵花8号卫星数据,研究的区域黄海,渤海地区。
4.对比的算法
二、详细步骤
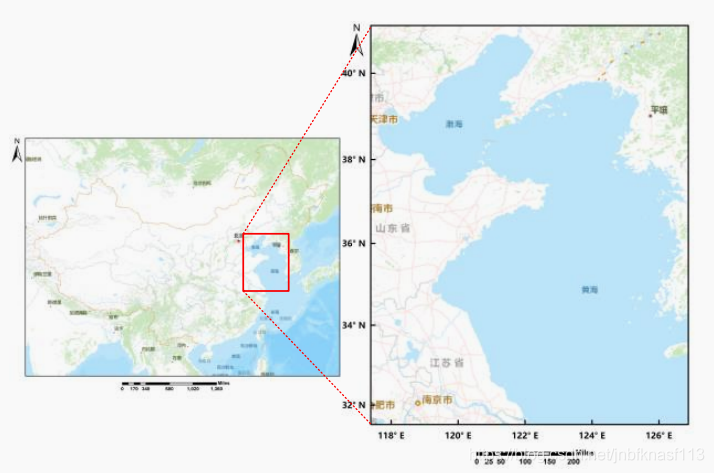
1.研究区域
黄海渤海地区:
2.动态阈值算法
(1)光谱特征与太阳天顶角变化关系
在海雾检测中,夜晚和白天的海雾比较稳定,其光谱特征变化不大,所以在阈值选择上可以选择固定的阈值。但对于黎明和黄昏,其光谱特征变化很大,尤其是可见光和近红外波段的反射率,因此固定的阈值无法实现黎明和黄昏海雾的检测。
因为海雾的光谱特征变化与太阳天顶角有关,所以构建一种基于太阳天顶角的动态阈值方法,太阳天顶角在黎明和黄昏的范围设定为 [ 81 ° , 90 ° ) [81°,90°) [81°,90°);
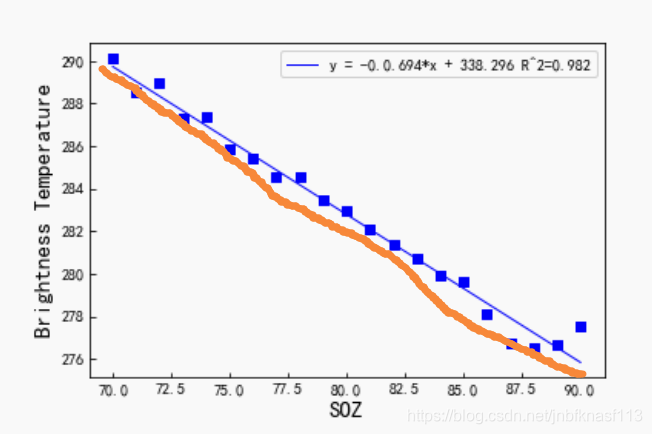
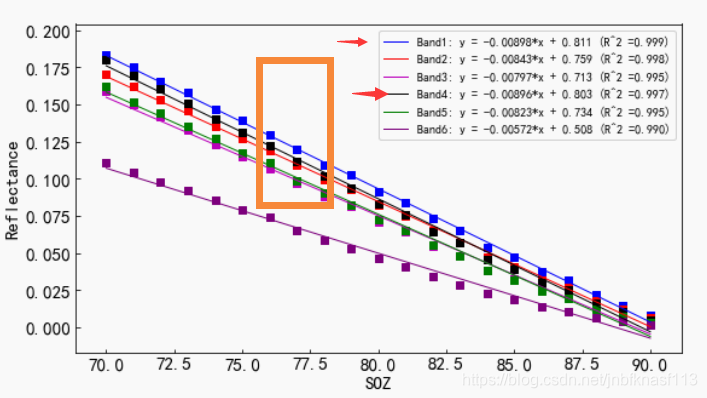
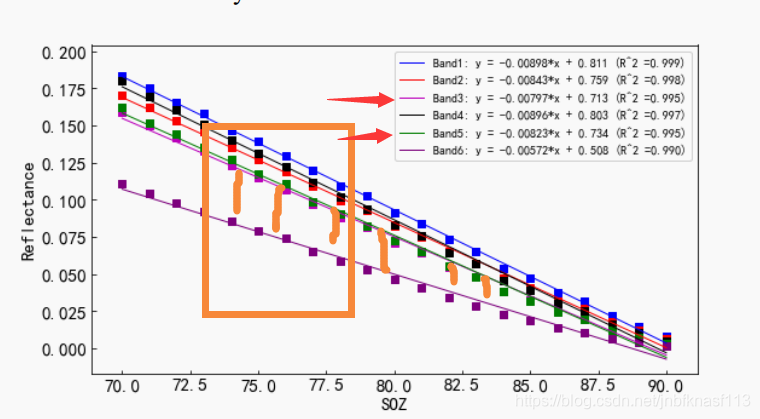
根选取10张黎明和黄昏的海雾图,得出可见波段海雾反射率太阳天顶角的关系。
从图中可以看出,随着太阳天顶角的增大,近红外波段反射率逐步减小到0
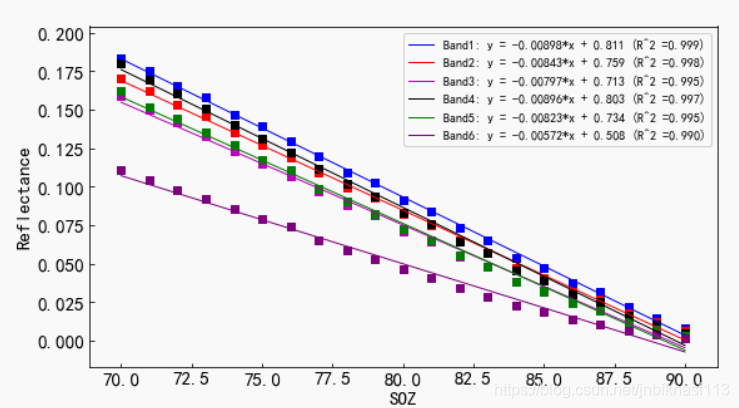
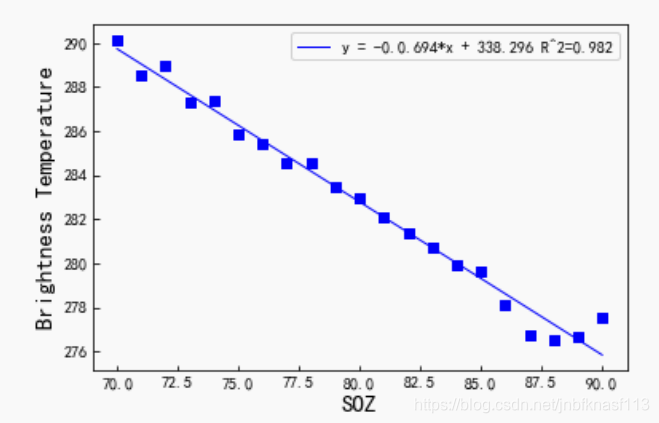
在远红外波段。只有第七波段与太阳天顶角成线性关系,其他波段没有关系。
波段7
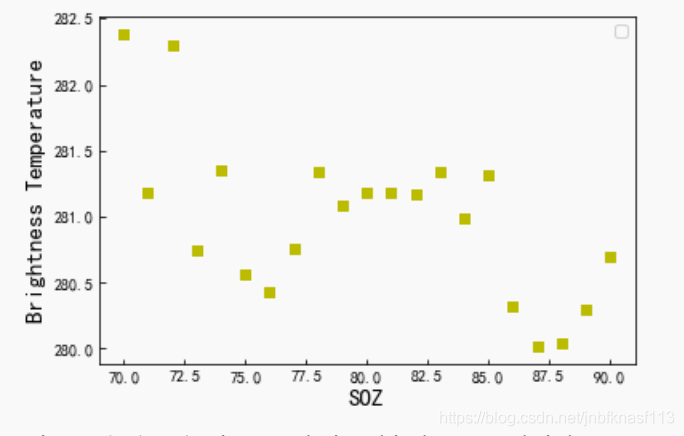
波段14
(2)算法构造
根据上面所讲的不同波段的亮温随着反射率变化的线性关系。
我们可以得出以下公式,这就是根据训练数据获得的各波段与雾的关系公式。所以对输入的图像处理,符合这些公式的就是雾,不符合的就是其他。
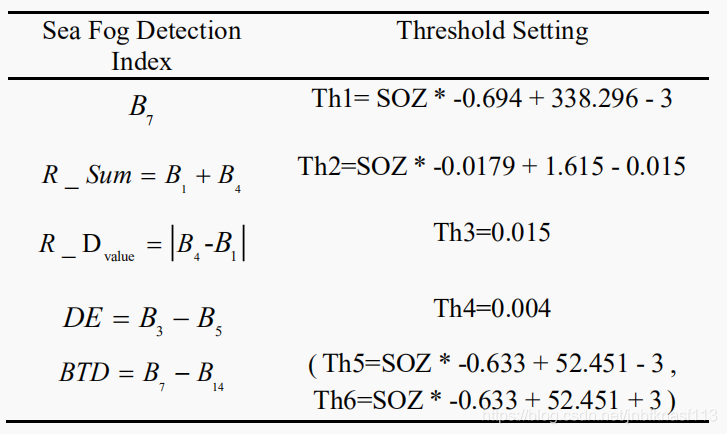
接下来我会一个公式一个公式的解释:
第一个公式:
B 7 B_7 B7也就是波段7,可以看到波段7是随着太阳天顶角变化而线性变化的所以阈值的选择,需要符合这个公式(这个-3的取值为了让公式下移一部分,来保证在线上下两侧的数值符合这个公式。),也就是输入进来的图片的 B 7 B_7 B7必须要大于这个公式的值。
画线工具不太好
第二个公式
计算 B 1 B_1 B1和 B 4 B_4 B4的和,这个的目的同样也是用来判断输出图片的 B 1 B_1 B1和 B 4 B_4 B4波段,如果输出图片的 B 1 B_1 B1和 B 4 B_4 B4加起来小于这个公式的值,说明不是雾。
第三个公式
计算 B 1 B_1 B1和 B 4 B_4 B4的亮温差,当输入的照片 B 1 B_1 B1和 B 4 B_4 B4的差在公式的范围内的话,说明是雾。
第四个公式
同理计算 B 3 B_3 B3和 B 5 B_5 B5的亮温差,当输入的照片 B 3 B_3 B3和 B 5 B_5 B5的差在公式的范围内的话,说明是雾。
第五个公式:(此处论文中似乎没有指出如何得出的此公式。)
计算 B 7 B_7 B7和 B 1 4 B_14 B14的亮温差,由于只有 B 7 B_7 B7与太阳天顶角有线性关系,我猜测,此处公式得出的是按照 B 1 4 B_14 B14最大的亮温计算的,因为 B 1 4 B_14 B14的亮温离散分布且波动不大只有[280,282.5]所以影响不大。得出亮温差公式在公式分为内的属于雾。
对于算法的构造还是不太明白的看流程图大概就懂了
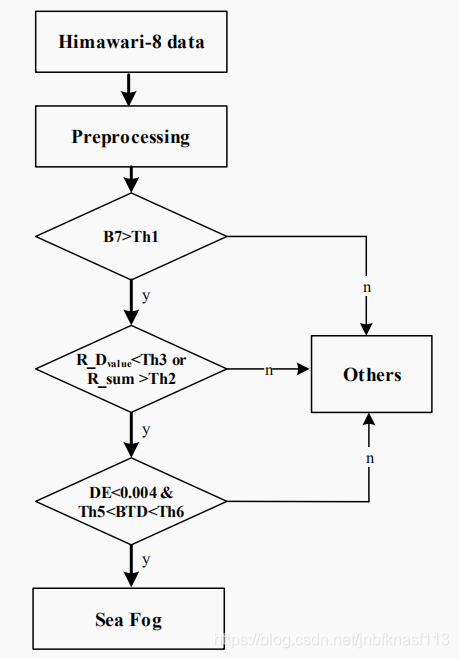
(3)算法流程
流程非常简单,对于输入的图像符合标准的就是雾,不符合的就是其他。
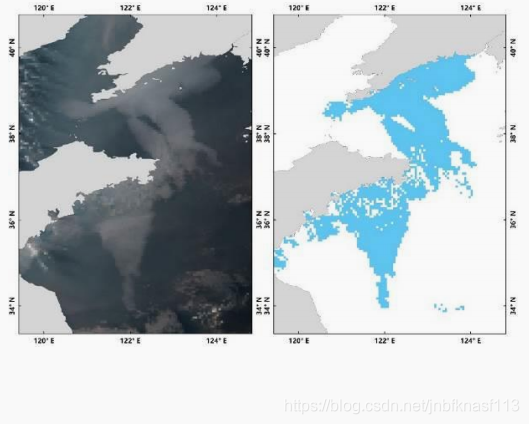
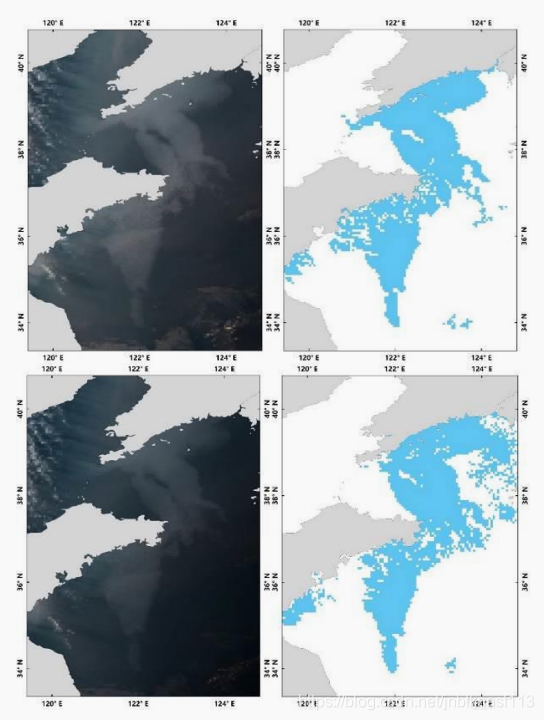
3.实验
选取了黄渤海地区,根据中国气象局的预报作为验证数据。
三、总结
有两个问题:
1.青岛部分,天气并没有海雾,但是由于低云的影响,所以判断成了海雾。也就是说,低云和海雾的区分做的还是不太好有待优化。
2.在太阳天顶角到达88度后,近红外波段辐射率接近0,此时的海雾的亮温和海面的温度基本相同。说明很有可能将海面识别为雾,很难用此方法检测。
3.对于海雾和低云的分离,单纯从光谱特征很难分离他们。
这篇关于基于动态阈值算法的黎明和黄昏时间海雾检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




