本文主要是介绍回归预测 | Matlab实现CPO-SVR冠豪猪优化支持向量机的数据多输入单输出回归预测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
回归预测 | Matlab实现CPO-SVR冠豪猪优化支持向量机的数据多输入单输出回归预测
目录
- 回归预测 | Matlab实现CPO-SVR冠豪猪优化支持向量机的数据多输入单输出回归预测
- 预测效果
- 基本描述
- 程序设计
- 参考资料
预测效果








基本描述
1.Matlab实现CPO-SVR冠豪猪优化支持向量机的数据多输入单输出回归预测(完整源码和数据)
2.CPO选择最佳的SVM核函数参数c和g;
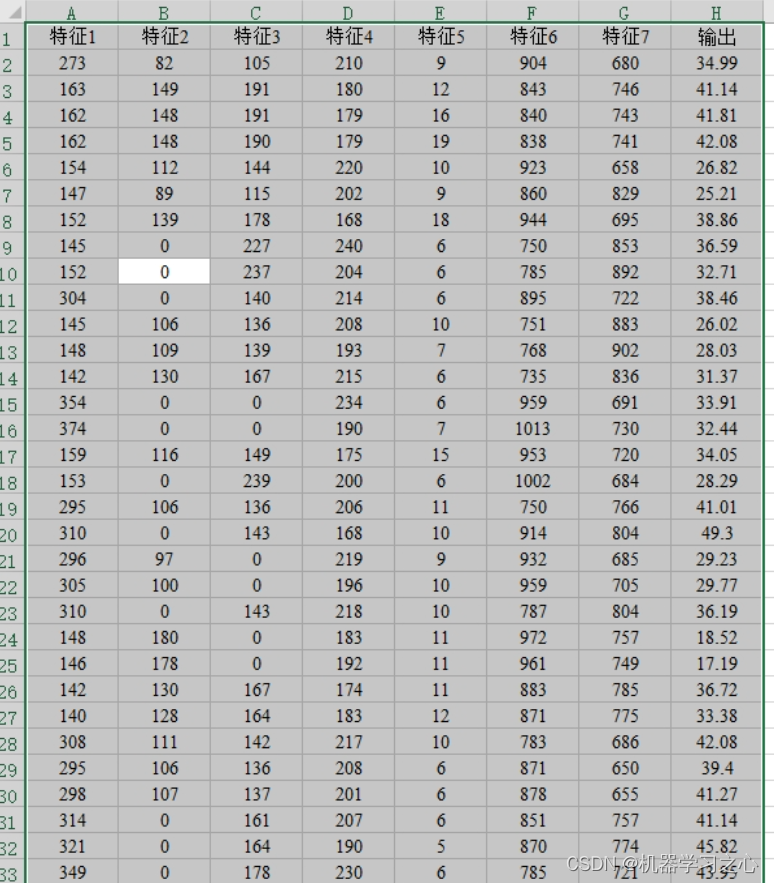
3.多特征输入单输出的回归预测。程序内注释详细,excel数据,直接替换数据就可以用。
4.程序语言为matlab,程序可出预测效果图,迭代优化图,相关分析图,运行环境matlab2020b及以上。评价指标包括:R2、RPD、MSE、RMSE、MAE、MAPE等。
5.代码特点:参数化编程、参数可方便更改、代码编程思路清晰、注释明细。
程序设计
- 完整程序和数据获取方式资源处下载Matlab实现CPO-SVR冠豪猪优化支持向量机的数据多输入单输出回归预测。
%% 参数设置
%% 优化算法
[Best_score,Best_pos, curve] = CPO(pop, Max_iteration, lb, ub, dim, fun); %% 获取最优参数
bestc = Best_pos(1, 1);
bestg = Best_pos(1, 2); %% 建立模型
cmd = [' -t 2 ', ' -c ', num2str(bestc), ' -g ', num2str(bestg), ' -s 3 -p 0.01 '];
model = svmtrain(t_train, p_train, cmd);%% 仿真预测
[t_sim1, error_1] = svmpredict(t_train, p_train, model);
[t_sim2, error_2] = svmpredict(t_test , p_test , model);%% 数据反归一化
T_sim1 = mapminmax('reverse', t_sim1, ps_output);
T_sim2 = mapminmax('reverse', t_sim2, ps_output);
T_sim1 =T_sim1';
T_sim2 =T_sim2';
%% 适应度曲线
figure;
plot(1 : length(curve), curve, 'LineWidth', 1.5);
title('适应度曲线', 'FontSize', 13);
xlabel('迭代次数', 'FontSize', 13);
ylabel('适应度值', 'FontSize', 13);
grid
set(gcf,'color','w')%% 相关指标计算
%% 均方根误差
toc
%% 测试集结果
figure;
plotregression(T_test,T_sim2,['回归图']);
set(gcf,'color','w')
figure;
ploterrhist(T_test-T_sim2,['误差直方图']);
set(gcf,'color','w')
%% 均方根误差 RMSE
error1 = sqrt(sum((T_sim1 - T_train).^2)./M);
error2 = sqrt(sum((T_test - T_sim2).^2)./N);%%
%决定系数
R1 = 1 - norm(T_train - T_sim1)^2 / norm(T_train - mean(T_train))^2;
R2 = 1 - norm(T_test - T_sim2)^2 / norm(T_test - mean(T_test ))^2;%%
%均方误差 MSE
mse1 = sum((T_sim1 - T_train).^2)./M;
mse2 = sum((T_sim2 - T_test).^2)./N;
%%
%RPD 剩余预测残差
SE1=std(T_sim1-T_train);
RPD1=std(T_train)/SE1;SE=std(T_sim2-T_test);
RPD2=std(T_test)/SE;
%% 平均绝对误差MAE
MAE1 = mean(abs(T_train - T_sim1));
MAE2 = mean(abs(T_test - T_sim2));
%% 平均绝对百分比误差MAPE
MAPE1 = mean(abs((T_train - T_sim1)./T_train));
MAPE2 = mean(abs((T_test - T_sim2)./T_test));参考资料
[1] https://blog.csdn.net/kjm13182345320/article/details/129036772?spm=1001.2014.3001.5502
[2] https://blog.csdn.net/kjm13182345320/article/details/128690229
这篇关于回归预测 | Matlab实现CPO-SVR冠豪猪优化支持向量机的数据多输入单输出回归预测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




