本文主要是介绍数据结构——普里姆(Prim)算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
普里姆算法(Prim算法),图论中的一种算法,可在加权连通图里搜索最小生成树。意即由此算法搜索到的边子集所构成的树中,不但包括了连通图里的所有顶点,且其所有边的权值之和亦为最小。
以下是数据结构中关于普里姆算法的操作(编程风格参考严蔚敏版数据结构)。
头文件及宏
#include<iostream>
#include<stdio.h>
using namespace std;
typedef char VerTexType;
typedef int ArcType;
#define MaxInt 32767
#define MVNum 100
#define OK 1
#define ERROR -1;
typedef int status;
图以及最短边集合的声明
typedef struct{VerTexType vexs[MVNum] {'A','B','C','D','E','F'};ArcType arcs[MVNum][MVNum];int vexnum = 6,arcnum = 10;
}AMGraph; typedef struct{VerTexType adjvex;//最小边在顶点集U的顶点 ArcType lowcost;//最小边上的权值
}Closedge[MVNum];特别说明!!!!!
在Closedge中,起点是通过节点VerTexType类型变量表示,而终点是通过下标int类型变量来表示。
adjvex就是某条边的起点,lowcost就是两点之间权值(距离),closedge[i]里的i是终点的下标。
理解好这个很重要,如果这个理解不好,那就不知道Prim里close辅助数组是怎么用的了。
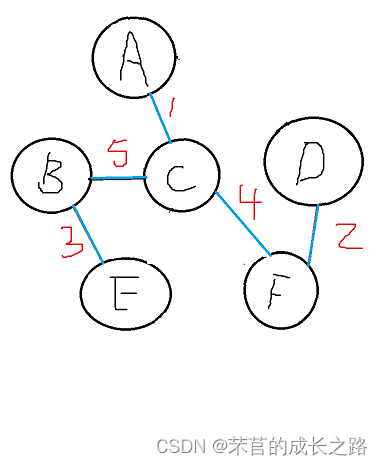
举个例子
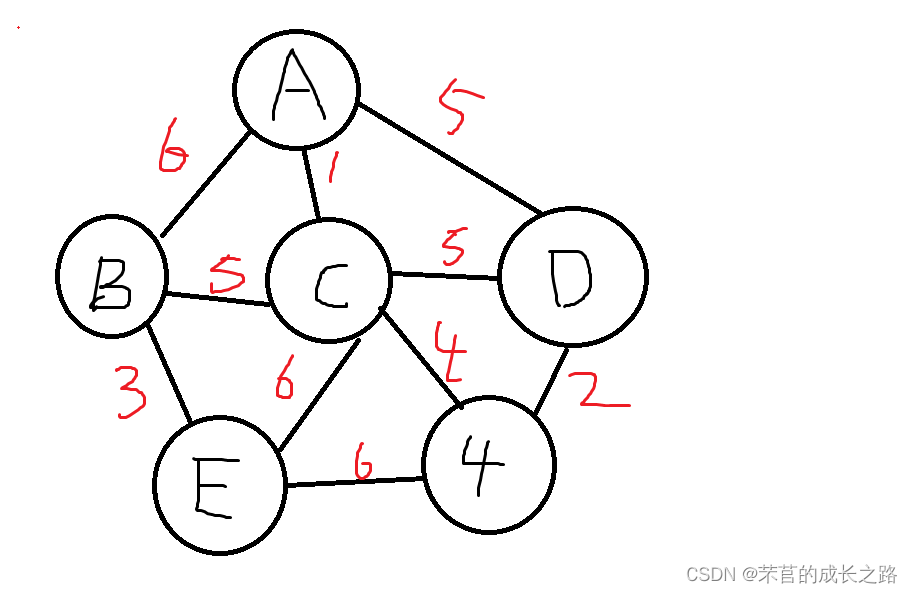
如何算出上图里的最小生成树呢?
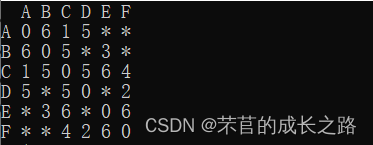
老样子先弄出邻接矩阵:
Prim核心算法:
void Prim(AMGraph &G,VerTexType v){int vi = LocateVex(G,v);//获取起始点的下标Closedge close;//辅助数组,用来记录不同点之间的距离以及起始位置(可理解为是一个点边集合) for(int i=0;i<G.vexnum;i++){if(vi!=i){close[i].adjvex=v;close[i].lowcost=G.arcs[vi][i];//初始化辅助数组close,让起点直连其它节点(就是假设起点到全部点的距离都是最短) }else{close[i].lowcost = 0;} } for(int i=1;i<G.vexnum;i++){//i从1开始是因为循环不需要执行vexnum次,不必管节点到自己的距离 int k = Min(close,G);//获取当前点边集合里边权值最小的终点(close里下标表示终点,adjvex表示起点,lowcost表示权值) VerTexType start = close[k].adjvex;//当前边集合里最短边的起点VerTexType end = G.vexs[k];//当前边集合里最短边的终点cout<<start<<"-"<<close[k].lowcost<<"-"<<end<<endl;//输出本次找出来的最短边及端点for(int j=0;j<G.vexnum;j++){//更新close表 if(G.arcs[k][j]<close[j].lowcost){//如果end到j点的距离小于start到j点的距离 //这是以对象的形式简写 close[j] = {G.vexs[k],G.arcs[k][j]};//最短距离从start到j点距离修改成end到j点的距离 //等价于这样写
// close[i].adjvex=G.vexs[k];
// close[i].lowcost=G.arcs[k][j];}//if}//for }
}
算法执行过程(红色线表示更新的边,蓝色的表示已被选取的边,黑色的表示当前步骤未被操作的边):
初始化辅助数组close。这一步目的是让起点直连其它的节点(就是说假设起点到其它全部节点的距离是最短的)。画出来是这样的: 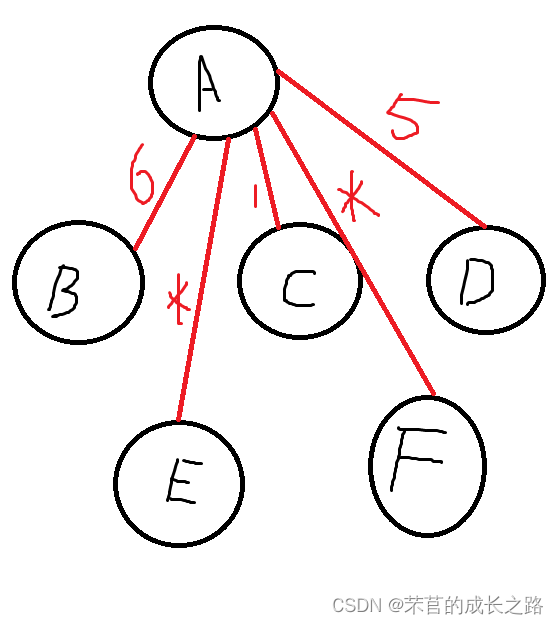
此时的close记录的就是从A到其它全部节点的距离的集合。
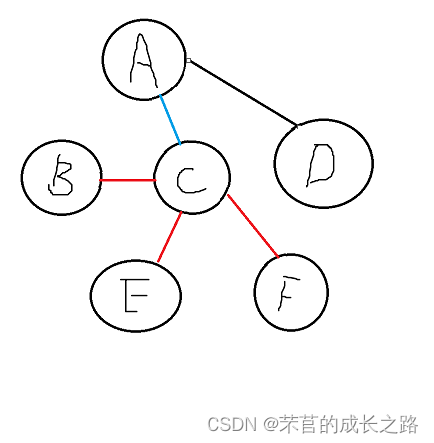
开始第一轮循环:在close这些边里选出最短的边,AC的值最小,记录起点为A终点为C(不必做更新操作,因为这条边本就在close里)。然后以AC同时和BEFD比较距离(权值大小)。比如:A到B的距离为为6,C到B的距离是5,close里本来是A到B的边变成C到B,然后close变成如下情况:
然后AC和E比较,和F比较、和D比较,CE<AE,CF<AF。得出来的close就是这样:
第二轮循环开始:然后选出最短的那条:CF(权值为4)。此时close是这个情况:
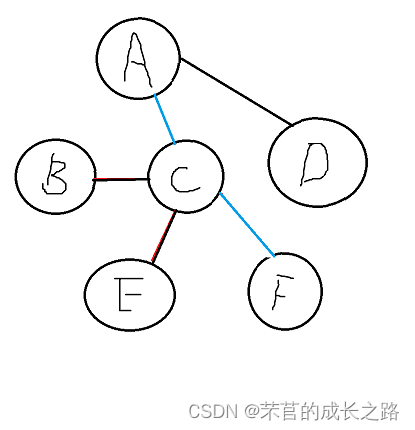
然后A、C、F同时比较距离和B、E、D的距离。CB权值最小close不变,C和F到E距离一致,保持CE相连,FD权值比CD和AD都小,连接FD,更新close。此时的close是这样子的:
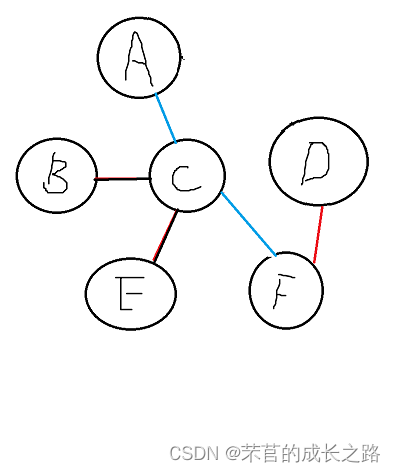
第三轮循环开始:此时的close是这样的:
A、C、F、D同时和B、E比较距离:发现是CB最短(但是在2轮循环里CB这条边已经在close里了,就没有实际更新close的操作)
第四轮循环开始:此时的close是这样的:
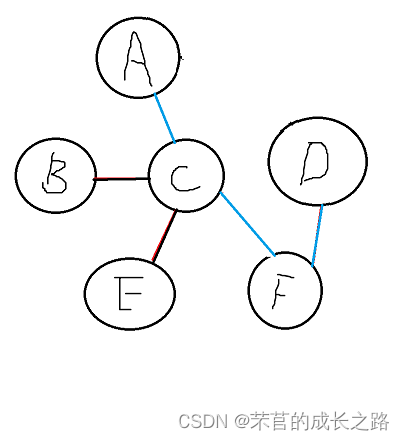
A、B、C、D、F同时与E比较权值:BE的距离比原先的CE短,取消CE更新为BE。此时的close是这个情况:
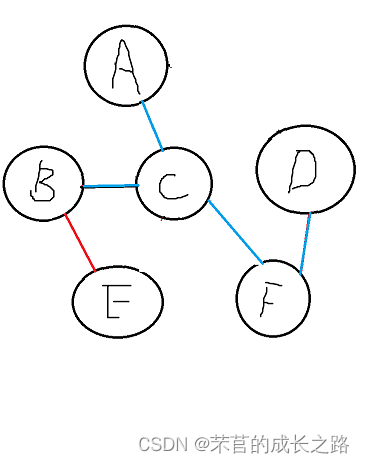
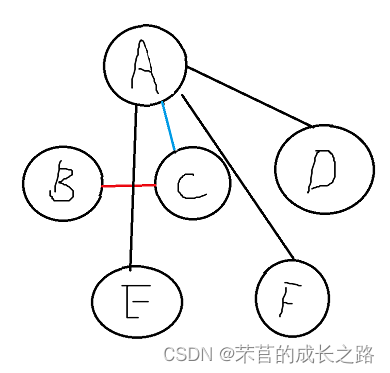
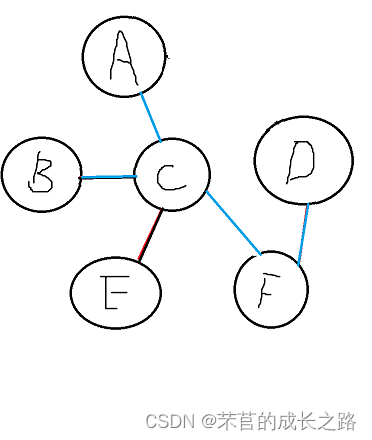
此时最小生成树生成完毕。最后结果如下所示:
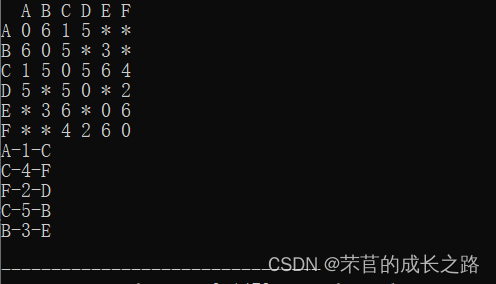
代码执行结果:
源码
#include<iostream>
#include<stdio.h>
using namespace std;
typedef char VerTexType;
typedef int ArcType;
#define MaxInt 32767
#define MVNum 100
#define OK 1
#define ERROR -1;
typedef int status;typedef struct{VerTexType vexs[MVNum] {'A','B','C','D','E','F'};ArcType arcs[MVNum][MVNum];int vexnum = 6,arcnum = 10;
}AMGraph; typedef struct{VerTexType adjvex;//最小边在顶点集U的顶点 ArcType lowcost;//最小边上的权值
}Closedge[MVNum];
//其实说白了就是adjvex就是某条边的起点,lowcost就是权值(距离),closedge[i]的i是终点。
//理解好这个很重要。
status CreateUDN(AMGraph &G){//创建无向图 for(int i=0;i<G.vexnum;i++){for(int j=0;j<G.vexnum;j++){if(i==j){G.arcs[i][j] = 0;}elseG.arcs[i][j] = MaxInt;//初始状态全部节点之间相互不可达}}G.arcs[0][1]=6;G.arcs[0][2]=1;G.arcs[0][3]=5;G.arcs[1][2]=5;G.arcs[1][4]=3;G.arcs[2][3]=5;G.arcs[2][4]=6;G.arcs[2][5]=4;G.arcs[3][5]=2;G.arcs[4][5]=6;for(int i=0;i<G.vexnum;i++){for(int j=0;j<G.vexnum;j++){if(G.arcs[i][j]!=MaxInt){G.arcs[j][i] = G.arcs[i][j];} }}//矩阵对称 return OK;
}void ShowGraph(AMGraph G){cout<<" ";for(int i=0;i<G.vexnum;i++){cout<<" "<<G.vexs[i];}cout<<endl;for(int i=0;i<G.vexnum;i++){cout<<G.vexs[i]<<" ";for(int j=0;j<G.vexnum;j++){if(G.arcs[i][j]==MaxInt){cout<<"* ";}else{cout<<G.arcs[i][j]<<" ";}}cout<<endl;}
}int LocateVex(AMGraph G, VerTexType v){int i;for(i=0;i<G.vexnum;i++){if(G.vexs[i]==v){return i;}} return ERROR;
}int Min(Closedge close,AMGraph G){int min = MaxInt;int mini;for(int i=0;i<G.vexnum;i++){if(min>close[i].lowcost&&close[i].lowcost!=0){//不等于0是指不和自身比较,没意义 min = close[i].lowcost;mini = i; }}
// cout<<mini<<endl;return mini;
} void Prim(AMGraph &G,VerTexType v){int vi = LocateVex(G,v);//获取起始点的下标Closedge close;//辅助数组,用来记录不同点之间的距离以及起始位置(可理解为是一个点边集合) for(int i=0;i<G.vexnum;i++){if(vi!=i){close[i].adjvex=v;close[i].lowcost=G.arcs[vi][i];//初始化辅助数组close,让起点直连其它节点(就是假设起点到全部点的距离都是最短) }else{close[i].lowcost = 0;//0表示自身或该边已被选取。 } } for(int i=1;i<G.vexnum;i++){//i从1开始是因为循环不需要执行vexnum次,不必管节点到自己的距离 int k = Min(close,G);//获取当前点边集合里边权值最小的终点(close里下标表示终点,adjvex表示起点,lowcost表示权值) VerTexType start = close[k].adjvex;//当前边集合里最短边的起点VerTexType end = G.vexs[k];//当前边集合里最短边的终点cout<<start<<"-"<<close[k].lowcost<<"-"<<end<<endl;//输出本次找出来的最短边及端点for(int j=0;j<G.vexnum;j++){//更新close表 if(G.arcs[k][j]<close[j].lowcost){//如果end到j点的距离小于start到j点的距离 //这是以对象的形式简写 close[j] = {G.vexs[k],G.arcs[k][j]};//最短距离从start到j点距离修改成end到j点的距离 //等价于这样写
// close[i].adjvex=G.vexs[k];
// close[i].lowcost=G.arcs[k][j];}//if}//for }
}int main(){AMGraph G;CreateUDN(G);ShowGraph(G);Prim(G,'A'); return 0;
}关于时间复杂度和空间复杂度
设顶点数n,边数e。邻接矩阵:O(n^2) 邻接表:O(elogn)
敬请批评指正。
这篇关于数据结构——普里姆(Prim)算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








