本文主要是介绍步进电机and伺服电机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、步进电机
- 二、常见的控制算法
- 三、伺服电机
- 总结
一、步进电机
步进电机的基本工作原理如下: 通过给定子的一个或多个相通电,线圈中流动的电流产生磁场,转子与该磁场对齐实现电能到动能的转化 。 通过依次提供不同的相位,转子可以旋转特定的量以到达所需的最终位置 。
在实际使用步进电机驱动器驱动中,我们常用 细分分数 来控制微步驱动的大小。步进电机的细分技术实质上是 一种电子阻尼技术 ,其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。细分是步进电机驱动器将上级装置发出的每个脉冲按步进电机驱动器设定的细分系数分成系数个脉冲输出 。 细分后电机运行时的实际步距角是基本步距角的几分之一。
步进电机输出的角位移与输入的脉冲数成正比,转速与脉冲频率成正比,改变绕组通电的顺序,电机就会反转。因此:
- 可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;
- 可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的;
- 可以通过控制绕组通电顺序,达到控制电机正反转的目的。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差 的特点,广泛应用于各种开环控制。
二、常见的控制算法
T梯形加减速算法:梯形算法的速度轮廓是梯形,故而得名,对梯形求导数可以得到矩形,因此本算法直接从勾勒加速度曲线入手,进行数值积分得出速度轮廓,进而转换为对应的定时器预设值,从而控制电机的速度变化,达到想要的效果。
S形加减速算法:加减速的变化过程中速度曲线呈现一个英文字母“S”形的,我们称之为S形加减速算法。S形加减速在启动停止以及高速运动时的速度变化的比较慢,导致冲击力噪音就很小,所以更适用于精密的工件搬运与建造。而梯形加减速更适合一些定长送料的场合。S形加减速分七段式和五段式算法,7段式具有平稳、精度高的特点,但该算法的参数复杂,大大降低到了工作效率且对硬件的要求较高;5段式算法简单、具有实时性和高精度的加减速控制算法,非常适合资源紧凑的小型嵌入式系统。
SPTA算法:SPTA算法根据用户输入的加速度和速度以及总脉冲数,自动计算加减速过程所需的定时器装载值,也不需要额外的RAM来存储表格,算法效率高、灵活方便,特别适合移植到一些资源紧俏的单片机,比如51单片机等。通过定时器定时中断来产生一个时间片,在定时器中断服务子程序中完成上述算法 ,在需要时,通过控制 GPIO 产生一个步进脉冲 。
三、伺服电机
伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位。
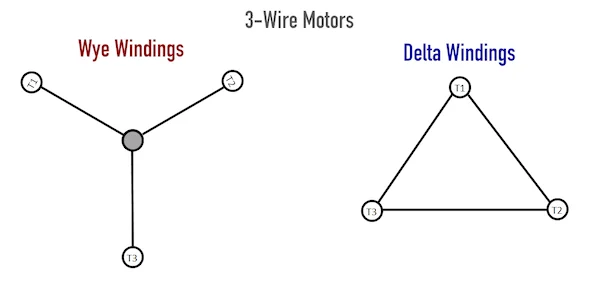
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。交流伺服电机和无刷直流伺服电机在功能上的区别:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。
伺服电机则是闭环控制,即通过传感器实时反馈电机的运行状态,由控制芯片进行实时调节。一般工业用的伺服电机都是三环控制,即电流环、速度环、位置环,分别能反馈电机运行的角加速度、角速度和旋转位置。
芯片通过三者的反馈控制电机各相的驱动电流,实现电机的速度和位置都准确按照预定运行。伺服电机能保证只要负载在额定范围内,就能达到很高的精度,具体精度首先受制于编码器的码盘,与控制算法也有很大关系。与步进电机原理结构不同的是,伺服电机由于把控制电路放到了电机之外,里面的电机部分就是标准的直流电机或交流感应电机。一般情况下电机的原始扭矩是不够用的,往往需要配合减速机进行工作,可以使用减速齿轮组或行星减速器。
总结
步进电机:步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。
伺服电机:是指伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
步进与伺服都是嵌入式控制系统中常用的电机种类,需要根据需求与成本进行选用。
这篇关于步进电机and伺服电机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!