本文主要是介绍HAL STM32基于系统滴答定时器(SysTick)实现多任务时间片轮询,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
HAL STM32基于系统滴答定时器(SysTick)实现多任务时间片轮询
📑RTOS(实时操作系统)和定时器时间片轮询是两种不同的任务调度和执行方式的差异简介
🔖 以下部分内容,由AI给出的解答:
- 🔖RTOS(实时操作系统):
- 🌿RTOS是一种专门设计用于实时系统的操作系统,它可以有效地管理多个任务,提供任务调度、同步和通信等功能。
- 🌿STM32可以使用多种RTOS,例如FreeRTOS、ChibiOS等,它们都提供了任务管理、信号量、消息队列等功能。
- 🌿在RTOS中,每个任务都有自己的优先级,并且RTOS会根据任务的优先级进行调度。高优先级的任务将获得更多的CPU时间。
- 🌿RTOS提供了更结构化的任务管理,使得编写和维护多任务应用程序变得更容易。
- 🔖定时器时间片轮询:
- 🌾定时器时间片轮询是一种基于定时器中断的任务调度方法,而不涉及RTOS的复杂性。
- 🌾在这种方法中,任务的执行由定时器中断触发,每个任务都有一个预定的时间片来执行。
- 🌾当定时器触发时,控制权将转移到下一个任务,如果当前任务没有执行完,它将在下一个时间片继续执行。
- 🌾这种方式的调度对于简单的应用来说可能足够,但在复杂的多任务系统中,可能会导致任务之间的优先级管理和调度变得复杂。
- 📺演示运行效果:

🛠STM32CubeMX工程配置
- 🔧在STM32CubeMX配置工程时,系统时基是默认配置的SysTick定时器。
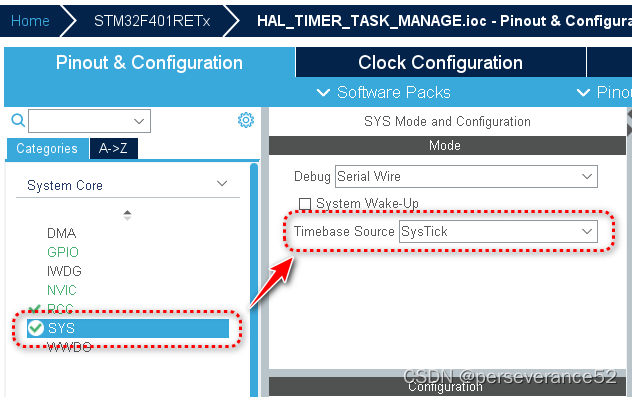
- 🔱软件默认配置的系统滴答定时器的优先级是最低的,可以根据个人使用情况,进行调整。
 - 🌿其他外设使用可以根据个人需求配置。
- 🌿其他外设使用可以根据个人需求配置。
⛳业务代码完善
-
✨STM32CubeMX所创建的工程,系统滴答定时器默认是没有启用中断的需要自行添加和补充。
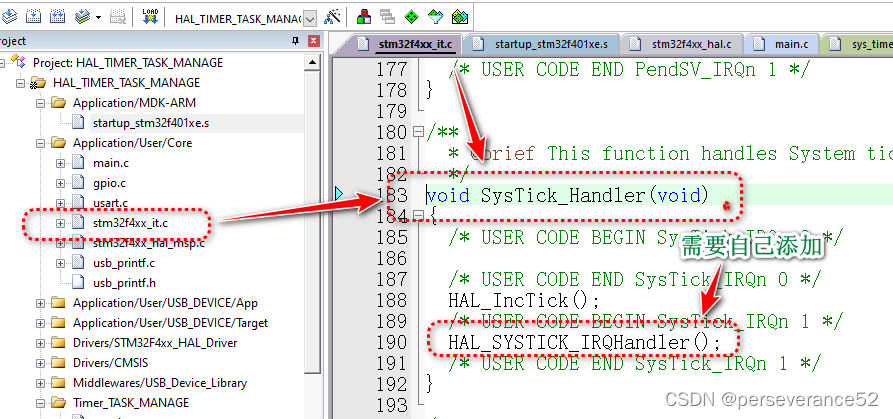
-
🪓滴答定时器中断回调函数完善。
void HAL_SYSTICK_Callback(void)
{Sys_Tick_Count();}
📗时间片轮询驱动
-
🍁时间片轮询,主要有3部分组成:时基(sys_time)、任务管理(sys_task)、任务对象(TASK)组成:
-
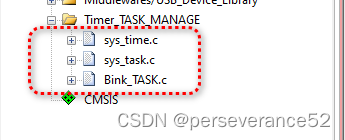
-
🌿sys_time.c
#include "sys_time.h"static unsigned short int sys_tick = 0;/*** @brief 系统时基* */
void Sys_Tick_Count(void)
{sys_tick += 1;
}/*** @description: 获取系统滴答计时* @param {*}* @return {*}*/
unsigned short int Get_Sys_Tick()
{return sys_tick;
}/*** @description: 判断是否超时* @param {unsigned long int} start 计算开始的时间* @param {unsigned long int} timeout 超时时长* @return {*}*/
unsigned short int Is_Timeout(unsigned short int start, unsigned short int timeout)
{return ((unsigned short int)(Get_Sys_Tick() - start)) > timeout ? 1: 0;
}- 🌿sys_task.c
#include "sys_task.h"
#include "sys_time.h"
#include "string.h"sys_task_t *sys_task_head = NULL;/*** @brief 系统任务* * @param task 任务* @param handler 任务轮询函数* @param interval 轮询间隔*/
void sys_task_create(sys_task_t *task, void (*handler)(void), unsigned int interval)
{sys_task_t *sys_task_tail = NULL;memset(task, 0, sizeof(sys_task_t));task->enable = 0;task->interval = interval;task->tick_cnt = Get_Sys_Tick();task->task_handler = handler;task->sys_task_next = NULL;if (sys_task_head == NULL){sys_task_head = task;return ;}sys_task_tail = sys_task_head;while (sys_task_tail->sys_task_next != NULL){sys_task_tail = sys_task_tail->sys_task_next;}sys_task_tail->sys_task_next = task;
}/*** @brief 启动任务* * @param task 任务句柄*/
void sys_task_start(sys_task_t *task)
{task->enable = 1;
}/*** @brief 停止任务* * @param task 任务句柄*/
void sys_task_stop(sys_task_t *task)
{task->enable = 0;
}/*** @brief 系统任务轮询* */
void sys_task_process()
{sys_task_t *task = NULL;for (task = sys_task_head; task != NULL; task = task->sys_task_next) {if (task->enable && Is_Timeout(task->tick_cnt, task->interval)){task->task_handler(); // 运行task->tick_cnt = Get_Sys_Tick(); }}
}- 🌿Blink_TASK.c:(具体执行的任务可以根据个人实际使用进行添加配置,这里以驱动3个led对象为例)
#include "Blink_TASK.h"
#include "usb_printf.h"void Blink_Task1(void){HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);usb_printf("This Blink_Task1\r\n");HAL_Delay(1000);}void Blink_Task2(void){HAL_GPIO_TogglePin(LED2_GPIO_Port, LED2_Pin);usb_printf("This Blink_Task2\r\n");HAL_Delay(800);}void Blink_Task3(void){HAL_GPIO_TogglePin(LED3_GPIO_Port, LED3_Pin);usb_printf("This Blink_Task3\r\n");HAL_Delay(600);}
- main.c中的内容:
- 🍃添加所需运行的任务句柄,需要运行多少个任务就创建多少个对象。
// 控制LED1任务
sys_task_t Task1_Blink;// 控制LED2任务
sys_task_t Task2_Blink;// 控制LED3任务
sys_task_t Task3_Blink;
- 🍃创建任务对象
void task_start()
{sys_task_create(&Task1_Blink, Blink_Task1, 50);sys_task_start(&Task1_Blink);sys_task_create(&Task2_Blink, Blink_Task2, 20);sys_task_start(&Task2_Blink);sys_task_create(&Task3_Blink, Blink_Task3, 30);sys_task_start(&Task3_Blink);
}
- 📝main.c所有代码
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "usb_device.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usb_printf.h"//Timer Task Manage
#include "sys_time.h"
#include "sys_task.h"
#include "Blink_TASK.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV */
// 控制LED1任务
sys_task_t Task1_Blink;// 控制LED2任务
sys_task_t Task2_Blink;// 控制LED3任务
sys_task_t Task3_Blink;
/* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */// 任务创建
void task_start()
{sys_task_create(&Task1_Blink, Blink_Task1, 50);sys_task_start(&Task1_Blink);sys_task_create(&Task2_Blink, Blink_Task2, 20);sys_task_start(&Task2_Blink);sys_task_create(&Task3_Blink, Blink_Task3, 30);sys_task_start(&Task3_Blink);
}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();MX_USB_DEVICE_Init();/* USER CODE BEGIN 2 */uint32_t Main_Fosc = HAL_RCC_GetSysClockFreq();// HAL_GetTick();usb_printf("Main_Fosc:%d \r\n", Main_Fosc);task_start();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while(1) {/* USER CODE END WHILE *//* USER CODE BEGIN 3 */sys_task_process();}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 4;RCC_OscInitStruct.PLL.PLLN = 168;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;RCC_OscInitStruct.PLL.PLLQ = 7;if(HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) {Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if(HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) {Error_Handler();}
}/* USER CODE BEGIN 4 */
void HAL_SYSTICK_Callback(void)
{Sys_Tick_Count();}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while(1) {}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */- 👉本示例中所使用的是USB CDC作为调试信息输出,
usb_printf.c、h代码:
#include "usb_printf.h"void usb_printf(const char *fmt, ...) {char buf[128];//自定义缓冲区大小va_list args;va_start(args, fmt);vsnprintf(buf, sizeof(buf), fmt, args);va_end(args);CDC_Transmit_FS((uint8_t *)buf, strlen(buf));
}
#ifndef _USB_PRINTF_H
#define _USB_PRINTF_H#include "stdio.h"
#include <stdarg.h>
#include "usbd_cdc_if.h"void usb_printf(const char *fmt, ...);#endif
📚示例工程源码
- 🔖基于stm32f401创建。固件版本:
STM32Cube FW_F4 V1.28.0
链接:https://pan.baidu.com/s/1ouPVpfv9E_2paunmgrOMRg?pwd=r3xk
提取码:r3xk
这篇关于HAL STM32基于系统滴答定时器(SysTick)实现多任务时间片轮询的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








