本文主要是介绍pcl+vtk(十四)vtkCamera相机简单介绍,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、vtkCamera相机
人眼相当于三维场景下的相机, VTK是用vtkCamera类来表示三维渲染场景中的相机。vtkCamera负责把三维场景投影到二维平面,如屏幕、图像等。
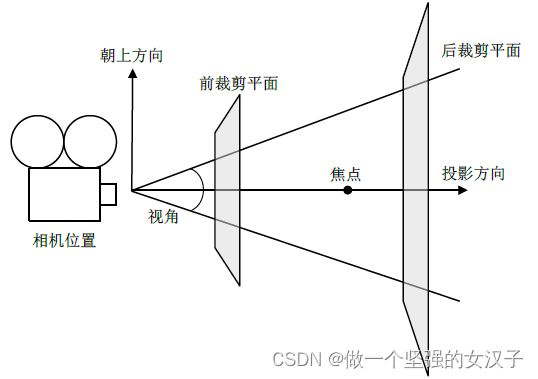
相机位置:即相机所在的位置,用方法vtkCamera::SetPosition()设置。
相机焦点:用方法vtkCamera::SetFocusPoint()设置,默认的焦点位置在世界坐标系的原点。
朝上方向:即哪个方向为相机朝上的方向。就好比我们直立看东西,方向为头朝上,看到的东西也是直立的,如果我们倒立看某个东西,这时方向为头朝下,看到的东西当然就是倒立的。相机位置、相机焦点和朝上方向三个因素确定了相机的实际方向,即确定相机的视图。
投影方向:相机位置到相机焦点的向量方向即为投影方向。
投影方法:确定Actor是如何映射到像平面的。vtkCamera定义了两种投影方法,一种是正交投影(OrthographicProjection),也叫平行投影(Parallel Projection),即进入相机的光线与投影方向是平行的。另一种是透视投影(PerspectiveProjection),即所有的光线相交于一点。
视角:透视投影时需要指定相机的视角(View Angle),默认的视角大小为30º,可以用方法vtkCamera::SetViewAngle()设置。
前后裁剪平面:裁剪平面与投影方向相交,一般与投影方向也是垂直的。裁剪平面主要用于评估Actor与相机距离的远近,只有在前后裁剪平面之间的Actor才是可见的。裁剪平面的位置可以用方法vtkCamera::SetClippingRange()设置。
二、vtkCamera相机参数
void vtkCamera::SetViewUp(double vx, double vy, double vz);设置相机的朝上方向,默认为(0, 1, 0)
void vtkCamera::SetPosition(double x, double y, double z); 设置相机位置,默认为(0, 0, 1)
void vtkCamera::SetFocalPoint(double x, double y, double z);设置焦点,默认为(0, 0, 0)
void vtkCamera::SetClippingRange(double dNear, double dFar);设置前后裁剪平面位置,默认为(0.1, 1000)
void vtkCamera::SetViewAngle(double angle); 设置相机视角,默认为30度,如果为平行投影则该角度无效
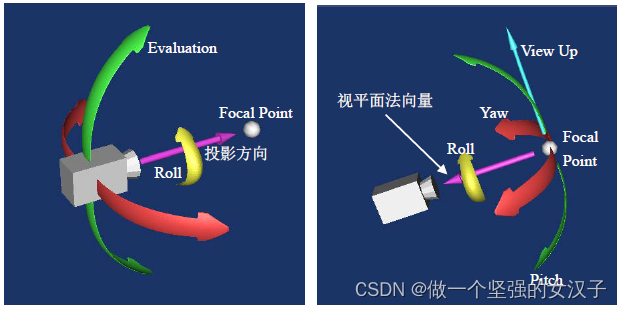
void vtkCamera::ComputeViewPlaneNormal();根据设置的相机位置、焦点等信息,重新计算视平面(View Plane)的法向量。一般该法向量与视平面是垂直的,如果不是垂直的话,Actor等看起来会有一些特殊的效果,如错切。
用方法vtkRenderer::GetActiveCamera()获取vtkRenderer渲染器里默认的相机。
用方法vtkRenderer::SetActiveCamera()把相机设置到渲染场景中。
三、vtkCamera控制相机运动
vtkCamera::Dolly(double value);
将相机与焦点的距离除以给定的推拉值。使用大于1的值向焦点推拉,使用小于1的值远离焦点推拉。
vtkCamera::Roll(double angle);
围绕投影方向旋转相机。这将使摄影机绕其轴旋转。
vtkCamera::Azimuth(double angle);
围绕以焦点为中心的视图向上矢量旋转相机。请注意,视图向上矢量是通过SetViewUp设置的,不一定垂直于投影方向。结果是相机的水平旋转(纬度)。
vtkCamera::Yaw(double angle);
使用相机的位置作为旋转中心,围绕视图向上矢量旋转焦点。请注意,视图向上矢量是通过SetViewUp设置的,不一定垂直于投影方向。结果是场景的水平旋转(纬度)。
vtkCamera::Elevation(double angle);
使用焦点作为旋转中心,围绕投影方向的负值与视图向上向量的叉积旋转相机。结果是场景的垂直旋转(经度)。
vtkCamera::Pitch(double angle);
使用相机的位置作为旋转中心,围绕视图向上矢量和投影方向的叉积旋转焦点。结果是摄影机垂直旋转(经度)。
vtkCamera::Zoom(double factor);
在透视模式下,将视角减小指定的因子。在平行模式下,将平行比例减小指定的因子。值大于1表示放大,值小于1表示缩小@注意:当UseExplicitProjectionTransformMatrix为true时,将忽略此设置。
重置相机参数。
参考文献:
VTK笔记-相机vtkCamera_vtk重置相机-CSDN博客
VTK相机参数_vtk camera默认参数-CSDN博客
VtkCamera总结_vtk体绘制相机-CSDN博客
这篇关于pcl+vtk(十四)vtkCamera相机简单介绍的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







