本文主要是介绍GNSS电离层视线方向电子含量(STEC)提取,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、基于GNSS观测值提取STEC
二、伪距法提取
三、相位平滑伪距法提取
一、基于GNSS观测值提取STEC
GNSS信号主要包括测码伪距和载波相位两种常用观测量,其观测方程可以表示为:
其中:
和
分别表示接收机r观测卫星s在第i个频率上的伪距和相位观测值
表示接收机r到卫星s的几何距离
和
表示接收机r、卫星s的钟差
表示卫星s的轨道误差
表示接收机r到卫星s观测路径上的对流层延迟
表示接收机r到卫星s观测路径上在第i个频率上的电离层延迟
和
表示接收机端与卫星端在第i个频率上的伪距硬件延迟
和
表示接收机端与卫星端在第i个频率上的相位小数偏差
表示接收机r与卫星s的相对论效应
从上式可以看到出了电离层延迟、硬件延迟和整周模糊度与频率有关外,其他误差项均与频率无关。因此可以通过两个或两个以上的无几何距离组合消除频率无关项的误差,进而方便求解电离层观测值:
令;
则电离层观测值可简化为:
目前利用上式的电离层观测值进行TEC提取的方法有三种:
- 伪距法,即直接利用无几何距离组合获取电离层TEC观测量,方法简单、易于计算,单精度较低。
- 相位平滑伪距法,即无几何距离观测值和伪距观测值计算电离层TEC观测值,方法简单,精度较高。
- 非组合PPP法,利用非组合PPP模型将电离层延迟作为待估参数估计,相较于相位平滑伪距法,其提取方法复杂,但是精度要比相位平滑伪距法高。
二、伪距法提取
伪距法提取的关键方程为:
在正确改正了卫星和测站上的DCB后得到STEC观测量,其中星站上的DCB可以通过上海天文台CAS发布的BSX文件获取。
三、相位平滑伪距法提取
直接将无几何距离伪距值和相位值
求和,即可得到相位模糊度Na,其中Na表示整周模糊度和相位小数偏差的合并项(同样和上面伪距法一样需要估计或者读取相关产品获取DCB):
上式中受伪距观测值噪声的影响,单历元求解的模糊度误差较大。鉴于模糊度在一个连续观测弧段内,如果不发生周跳,其值不会改变。因此可以通过对一个连续弧段取平均求模糊度的方式来削弱伪距观测值噪声的影响。若连续弧段长度为n个历元,k表示历元号则有:
由此得到STEC的提取方程:
四、实验结果和分析总结
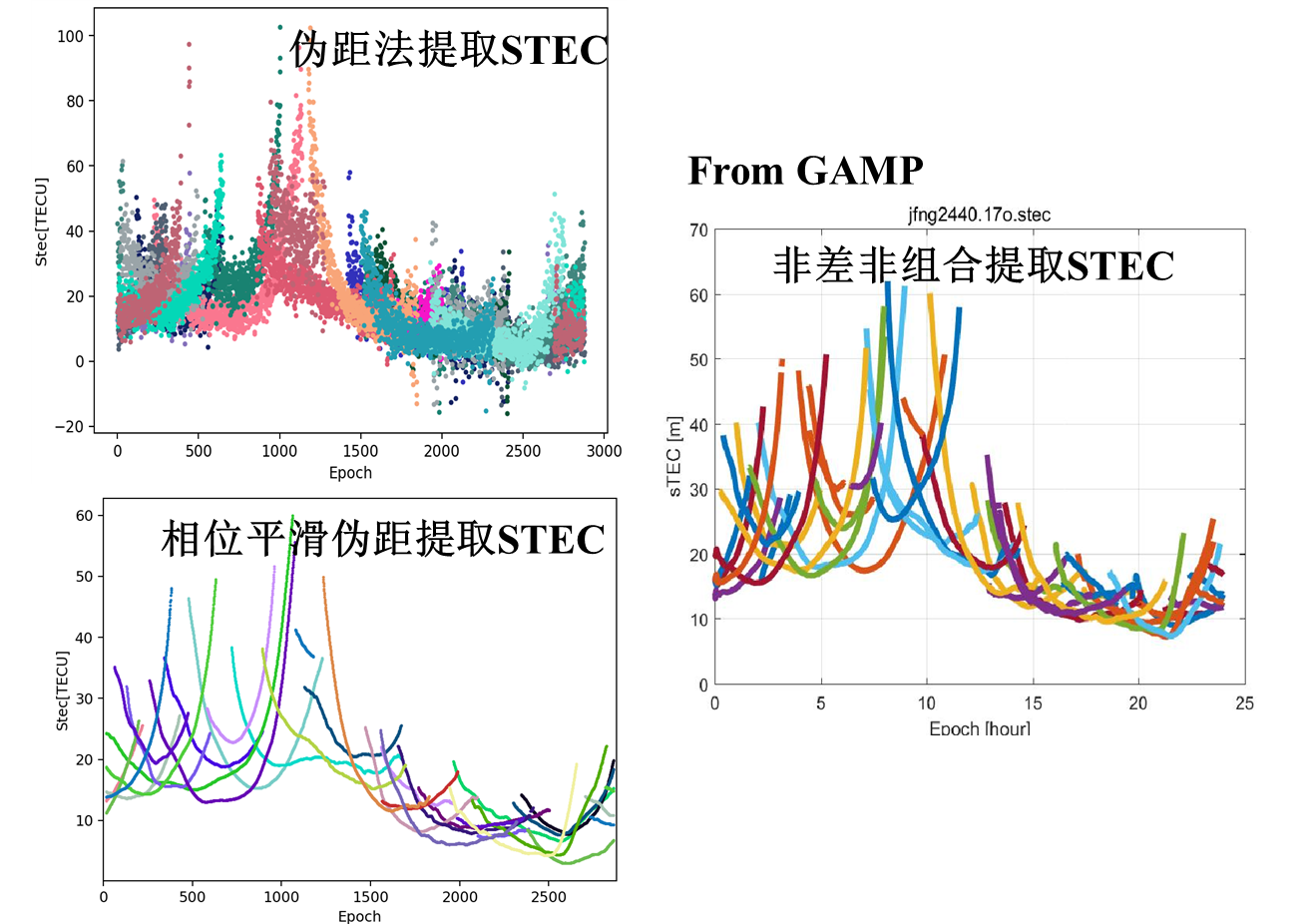
图1JFNG站上STEC提取结果对比
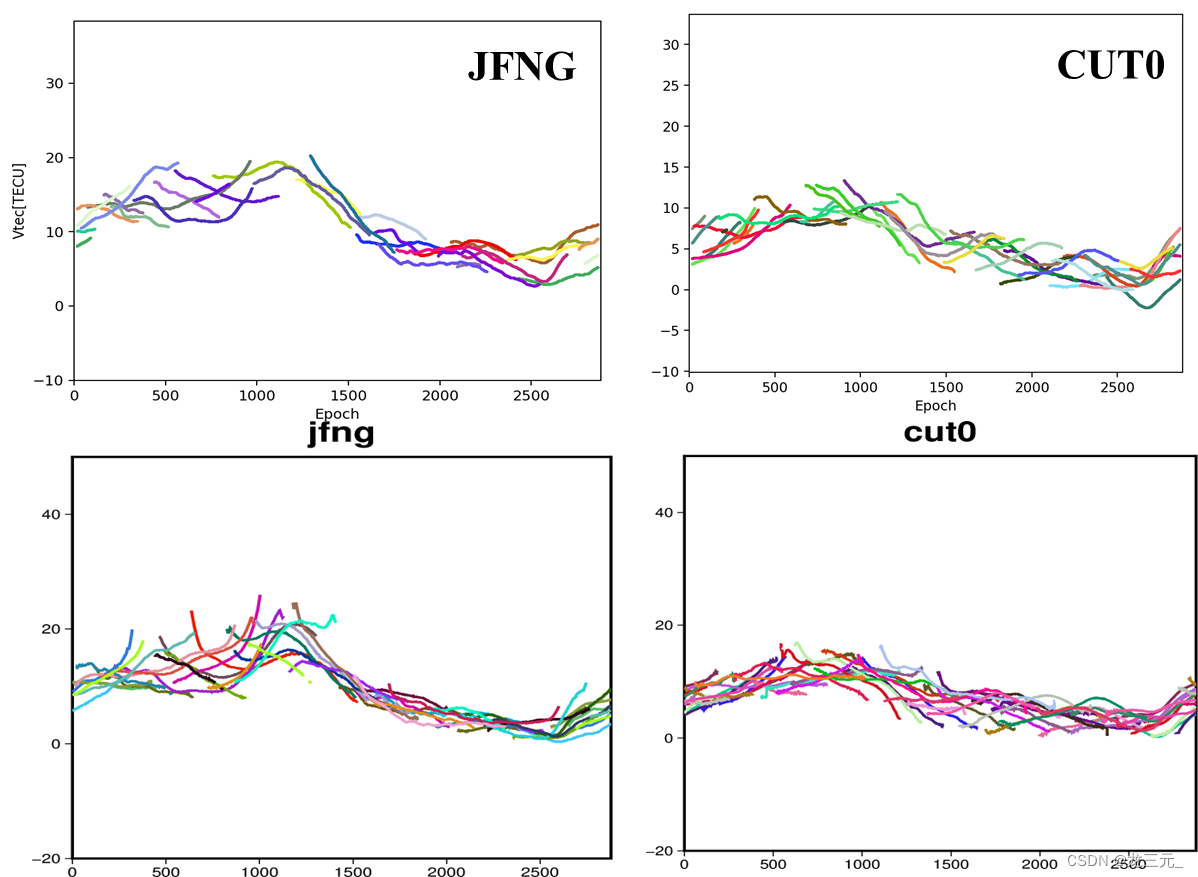
图2 STEC转换为VTEC结果对比
由图中可以看出,虽然伪距法得到不同卫星的电离层TEC 观测值的站间单差值貌似完美重合,但只是均值意义上的貌似重合,其波动范围非常大。而相位平滑伪距法得到的电离层TEC观测值每颗卫星弧段内非常平滑,而且波动幅度很小,说明该方法很好的平滑了伪距噪声影响。
这篇关于GNSS电离层视线方向电子含量(STEC)提取的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





