本文主要是介绍机器人DH建模,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
D-H
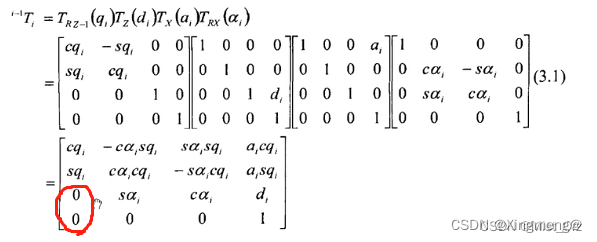
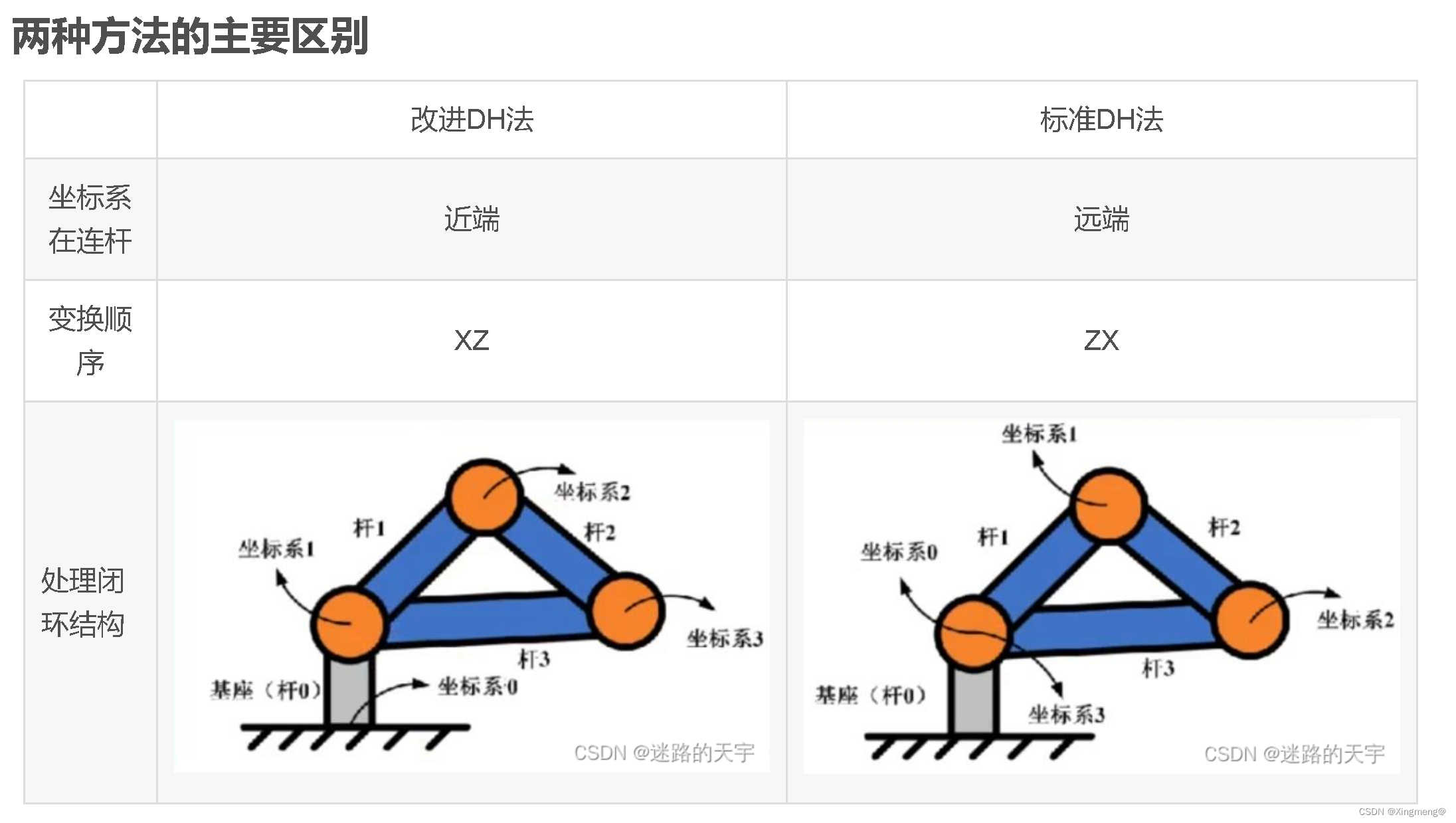
- 根据表达式判断所建立的DH模型是标准型(Standard DH)还是改进型(Modified DH) 第三四行的首元素为0的是标准型,参考博客
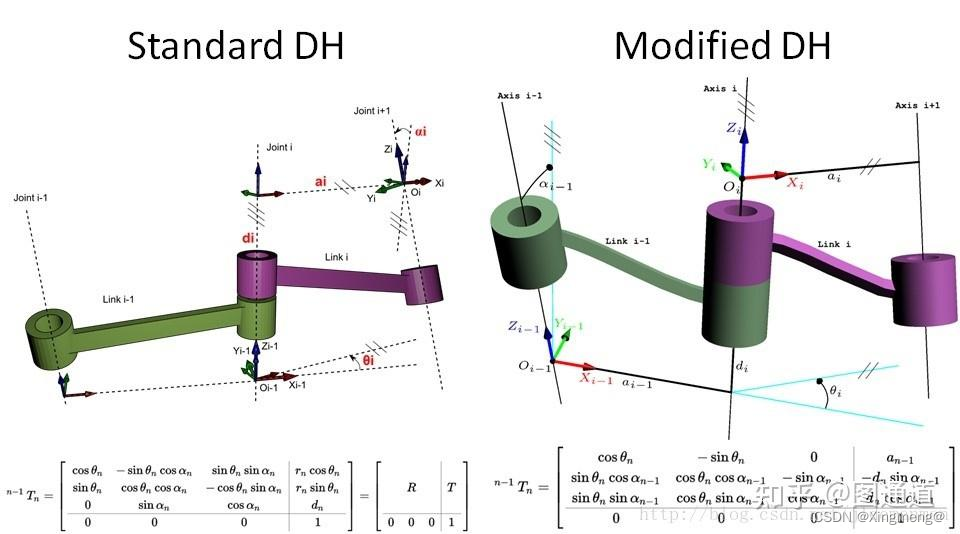
- 标准DH参数坐标系建立在传动轴上,而修正DH参数坐标系建立在驱动轴上。
- 修正DH参数中各个参数的物理意义与标准DH参数是一样的。
- 对于传统的串联机器人而言,两者的表现能力是一样的,没有优劣之分,我们可以选择其中一种方法进行建模。然而,由于修正DH参数坐标系建立在驱动轴上,对于树状结构的机器人,其表现能力更强,可以简化问题。
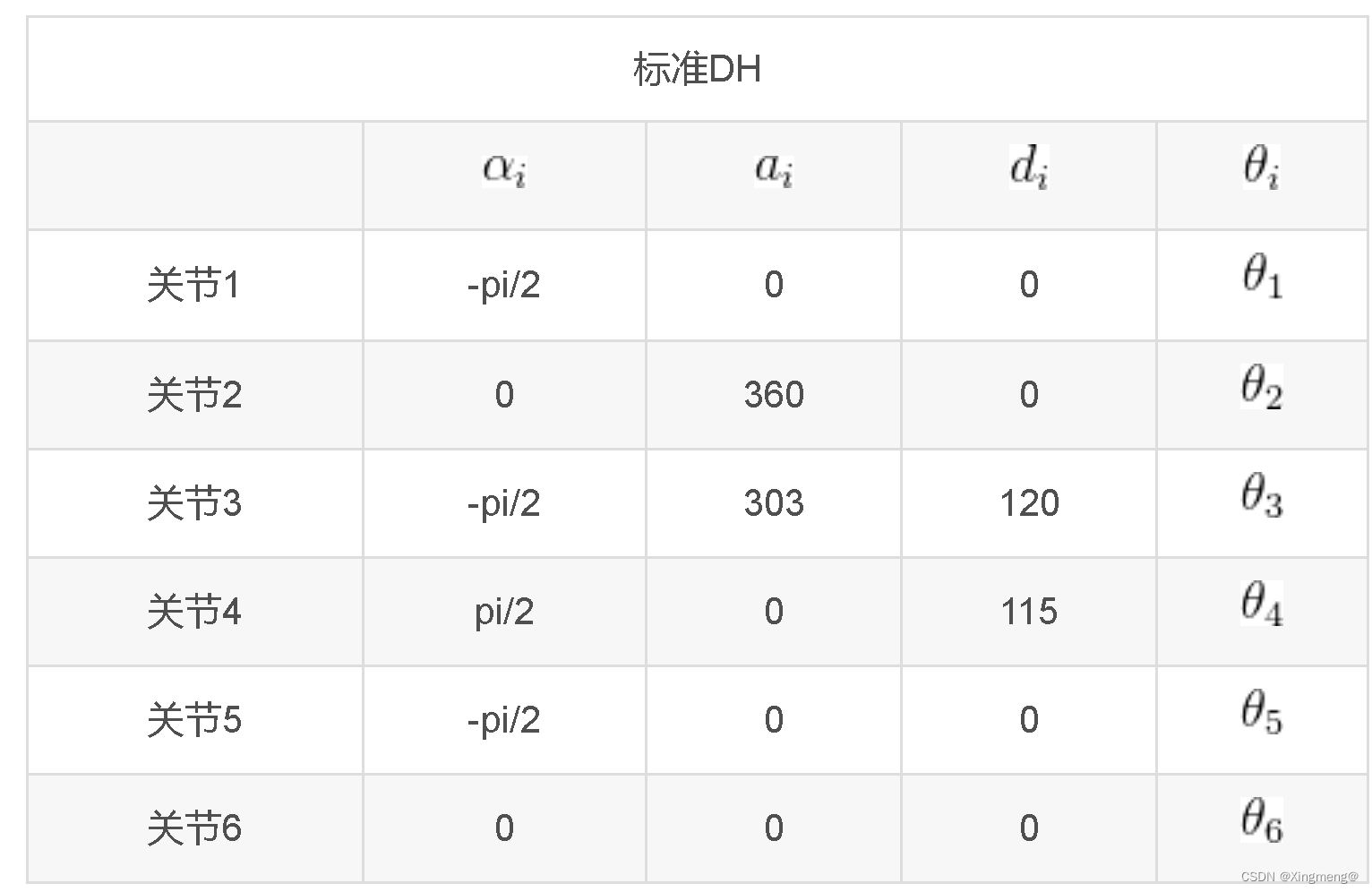
- 对于标准DH参数,根据DH参数表,连乘得到的是末端工具坐标系到机器人基坐标系的齐次变换矩阵;
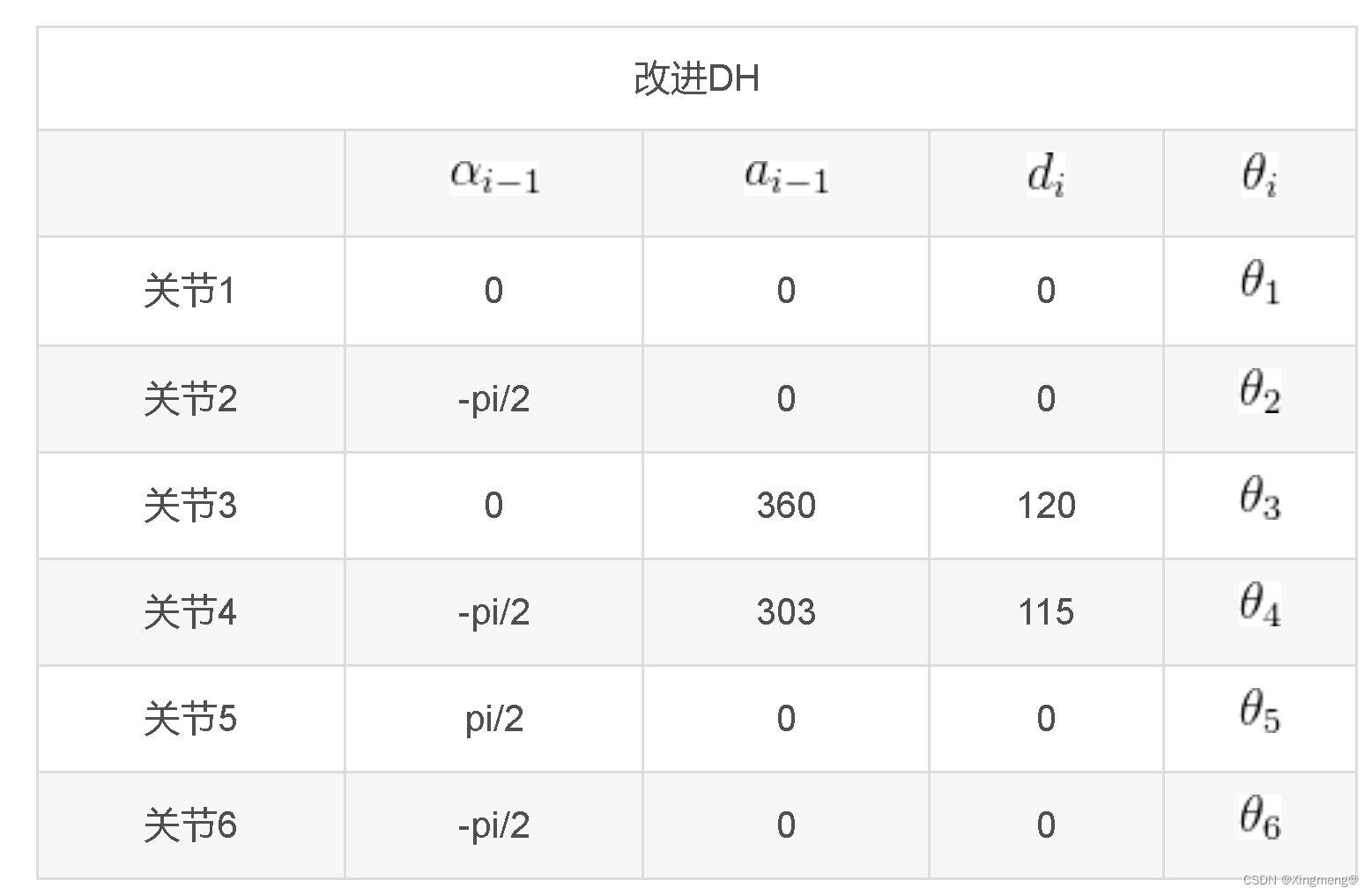
- 对于修正DH参数,根据DH参数表,连乘得到的是最后一个驱动关节上的坐标系到机器人基坐标系的齐次变换矩阵,变换到末端工具坐标系还需增加一个变换(通常为平移变换)。
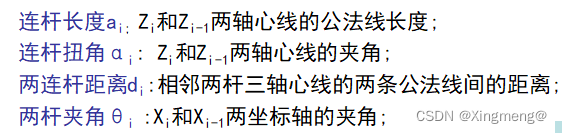
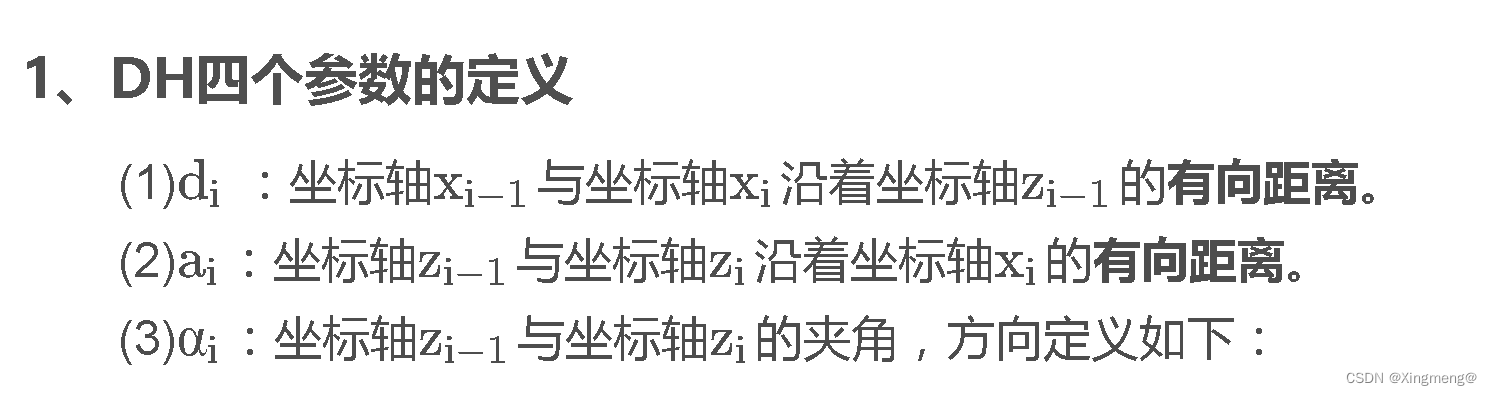
- θ i \theta_i θi和 d i d_i di在SDH和MDH中一样,只有 α \alpha α和 a a a不同,具体可以参考博客,表述如下:
标准DH和改进型DH参数表的相互转换
这篇关于机器人DH建模的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








