本文主要是介绍双极性单项桥式PWM逆变(simulink仿真),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
控制方法:
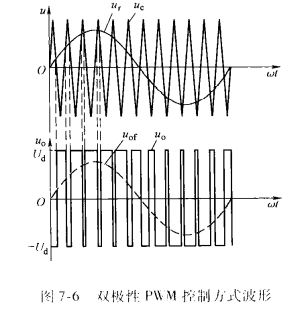
和单极性PWM控制方式相对应的是双极性控制方式。单相桥式逆变电路在采用双极性控制方式时的波形如下图所示。采用双极性方式时,在Ur的半个周期内,三角波载波不再是单极性的,而是有正有负,所得的PWM波也是有正有负。在Ur的一个周期内,输出的PWM波只有±Ud两种电平,而不像单极性控制时还有零电平。仍然在调制信号Ur和载波信号Uo的交点时刻控制各开关器件的通断。在Ur的正负半周,对各开关器件的控制规律相同。即当Ur>Uo时,给V1和V4以导通信号,给V2和V3以关断信号,这时如io>0,则V1和V4通,如io<0,则VD1和VD4通,不管哪种情况都是输出电压Uo=Ud当Ur<Uc时,给V2和V3以导通信号,给V1和V4以关断信号,这时如io<0,则V2和V3通,如io>0,则VD2和 VD3通,不管哪种情况都是Uo= -Ud。
simulink仿真电路图:
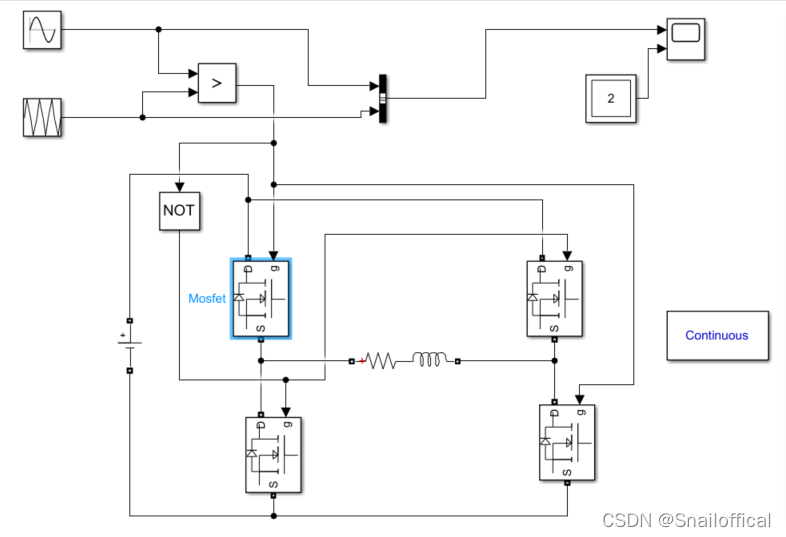
仿真原理:
正弦波发生器与三角波发生器通过关系比较器进行比较,得到PWM调制信号,将调制信号给V1,V3作为触发,将调制信号的互补信号给V2,V4作为触发,从而得到相应的PWM逆变信号。
使用元件:
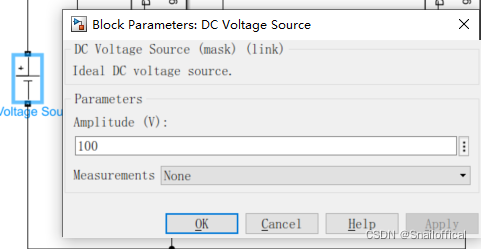
1.直流电源
2.正弦波发生器:
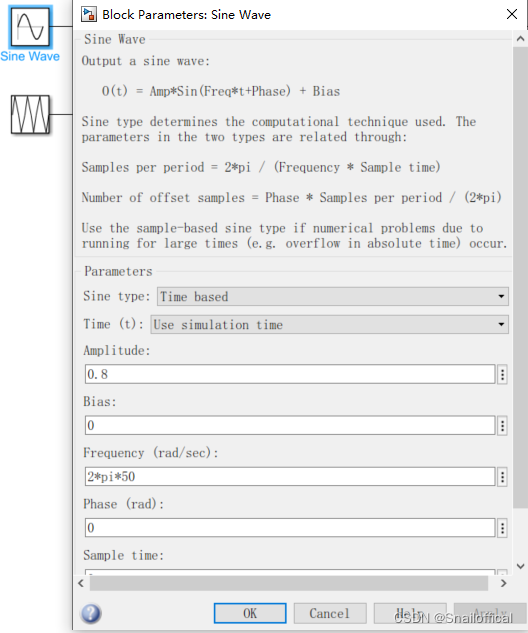
设置频率为50hz,幅度为0.8V。
3.三角波发生器:
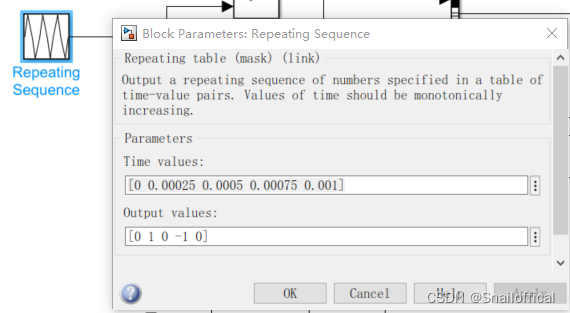
设置载波为1KHZ的三角波,幅度为1V(根据调制法原理,三角波的波形应该比正弦波大)Time values设置为一个三角波周期的时间,频率为1k,所以时间为1e-3一周期,Output values为幅度,设置为-+1V的幅度,两者结合取5个点。
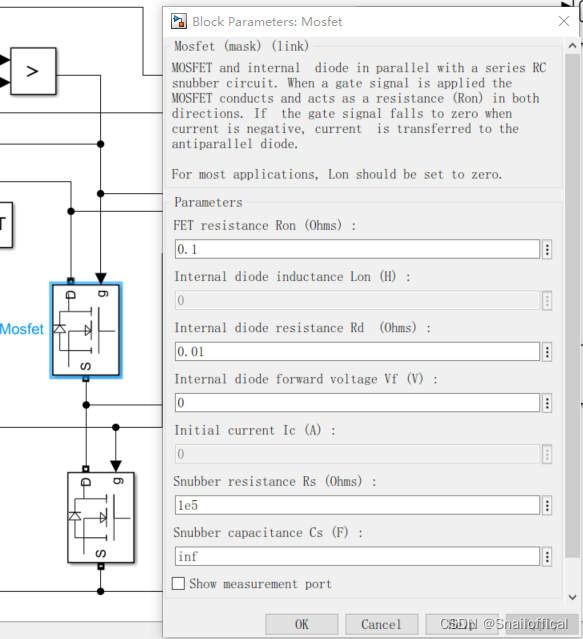
4.Mosfet
5.关系运算
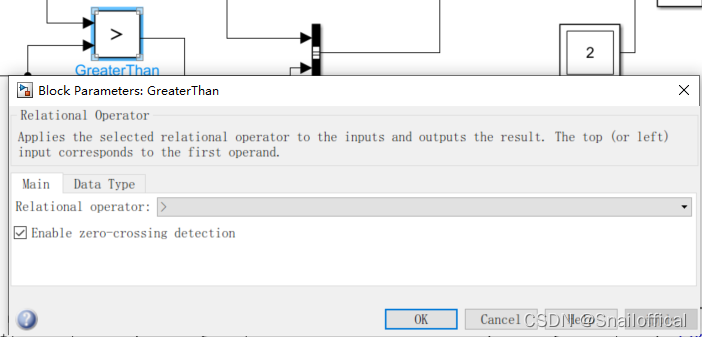
因为关系运算符有严格的第一第二输入量比较之分,所以关系运算符的连线极度需要注意,在本实验体现不明显,在单极性时比较连线的错误会导致波形有问题。
6.逻辑运算符
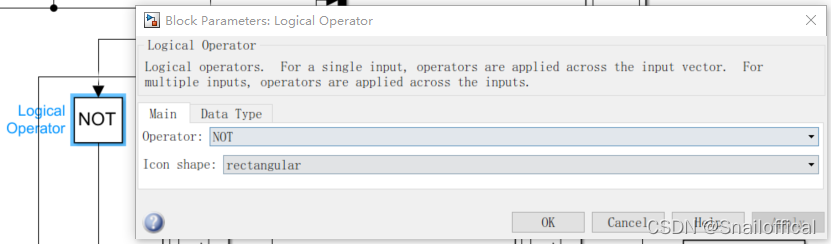
V1V2状态互补需要用到
7.阻感负载
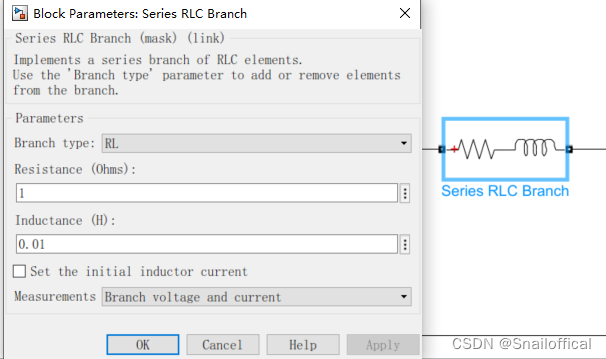
打开电压电流的测量选项,后期用万有表测量波形。
8.万有表
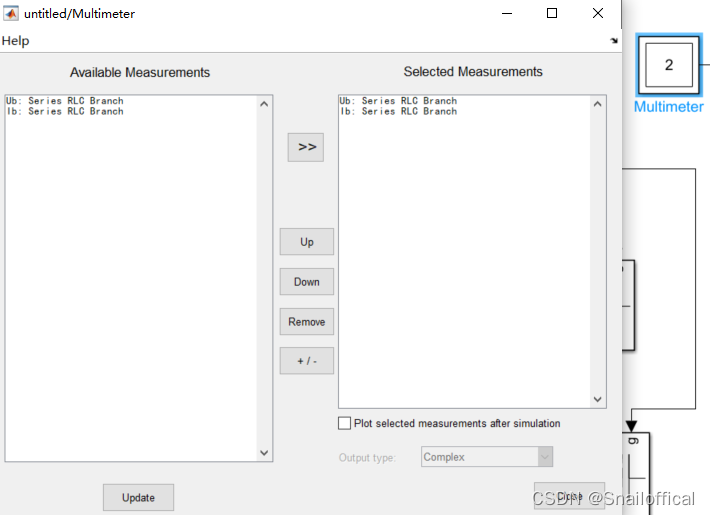
导入阻感负载的电流量电压量
9.powergui
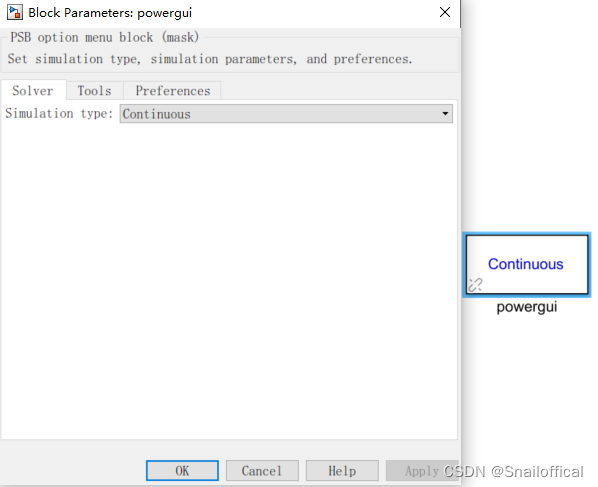
用于显示电压电流波形
仿真波形:
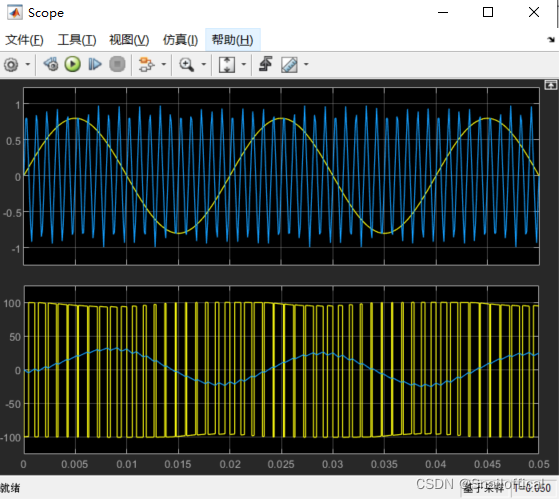
仿真问题:
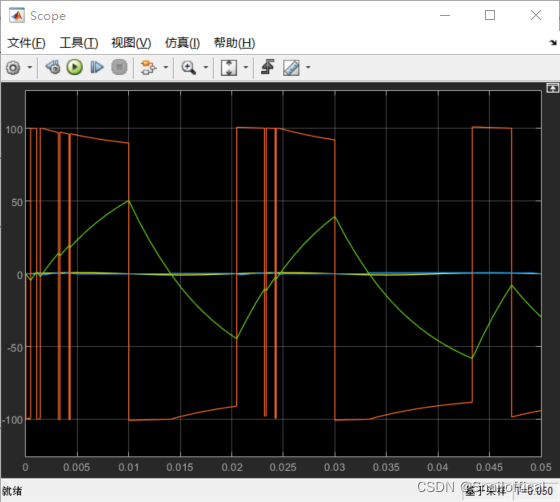
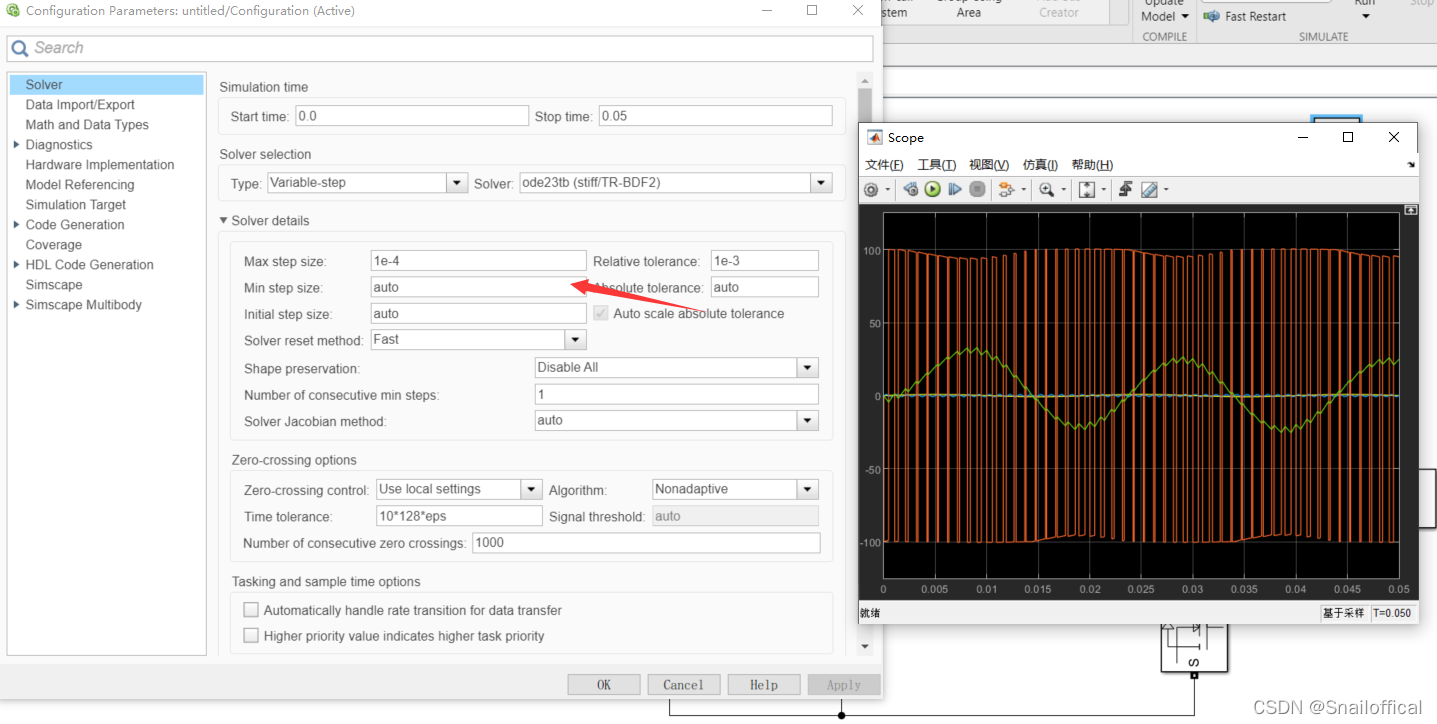
如果仿真中出现仿真波形不完整的情况(如下图),请在model settings中更改设置。
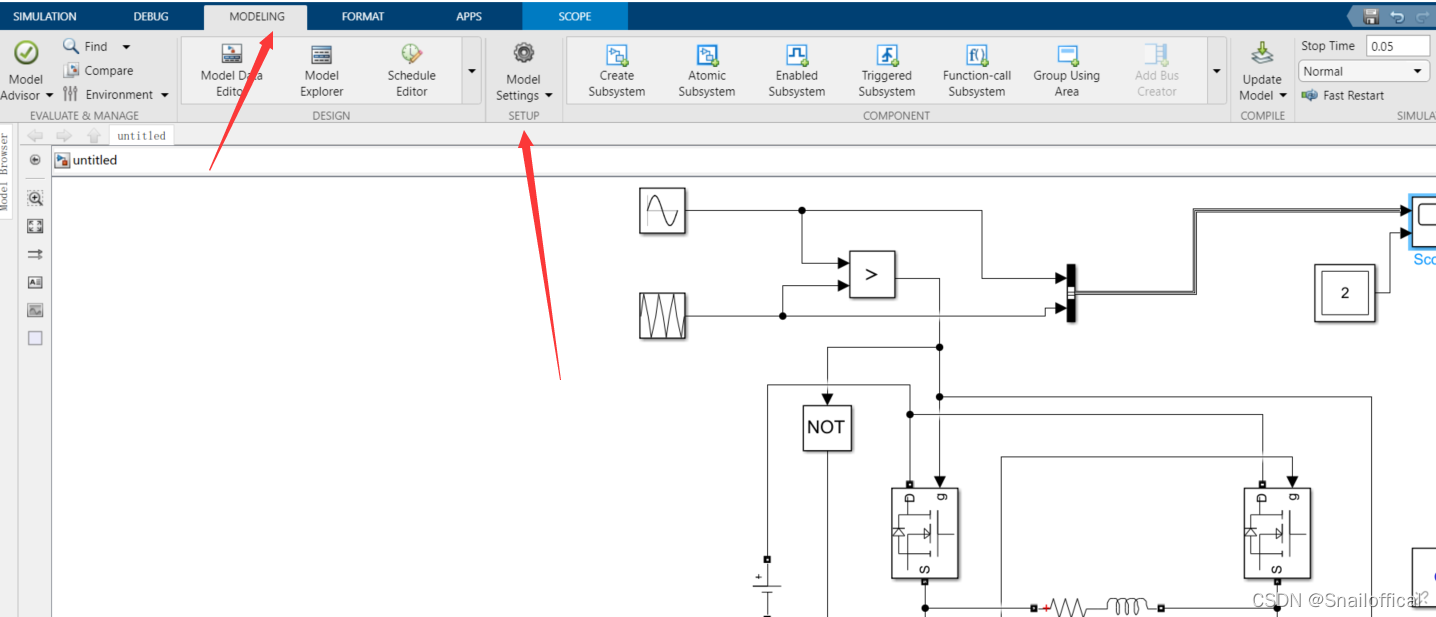
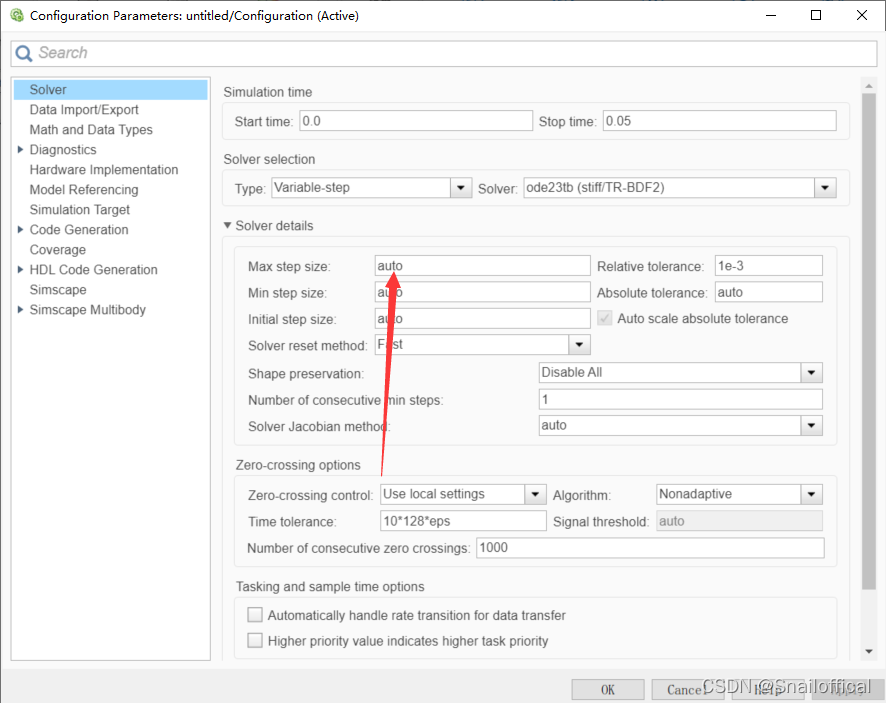
将最大步长改短
这篇关于双极性单项桥式PWM逆变(simulink仿真)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








