本文主要是介绍路径规划算法:基于野狗优化的机器人路径规划算法- 附matlab代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
⛄ 内容介绍
室内环境栅格法建模步骤
1.栅格粒大小的选取
栅格的大小是个关键因素,栅格选的小,环境分辨率较大,环境信息存储量大,决策速度慢。
栅格选的大,环境分辨率较小,环境信息存储量小,决策速度快,但在密集障碍物环境中发现路径的能力较弱。
2.障碍物栅格确定
当机器人新进入一个环境时,它是不知道室内障碍物信息的,这就需要机器人能够遍历整个环境,检测障碍物的位置,并根据障碍物位置找到对应栅格地图中的序号值,并对相应的栅格值进行修改。自由栅格为不包含障碍物的栅格赋值为0,障碍物栅格为包含障碍物的栅格赋值为1.
3.未知环境的栅格地图的建立
通常把终点设置为一个不能到达的点,比如(-1,-1),同时机器人在寻路过程中遵循“下右上左”的原则,即机器人先向下行走,当机器人前方遇到障碍物时,机器人转向右走,遵循这样的规则,机器人最终可以搜索出所有的可行路径,并且机器人最终将返回起始点。
备注:在栅格地图上,有这么一条原则,障碍物的大小永远等于n个栅格的大小,不会出现半个栅格这样的情况。
野狗优化算法
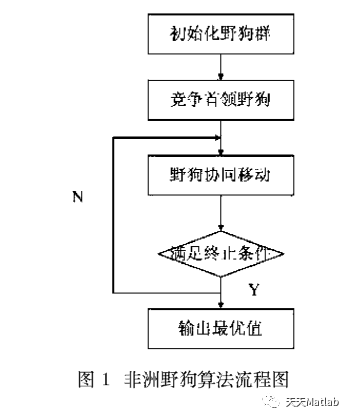
非洲野狗主要生活在非洲的干燥草原和半荒漠地带,活跃于草原、稀树草原和幵阔的干燥灌木丛.它们通常群居,领土范围大小在200到2000平方公里之间,通过叫声进行定位.采取群体合作方式猎杀中型有蹄动物,追击时速可达45千米.每个群落大约有40名成员.一般每个群落的成年成员大约是7-15只,由一对首领统治.它们善于协作,合作狩猎时,由雄性首领率领,在领地内游猎.非洲野狗狩猎依赖视觉而非嗅觉,它们发现猎物后会紧紧追逐,直到猎物疲惫不堪.非洲野狗用各种不同的方式进行彼此之间的联系,它们使用气味(嗅觉),声音和姿势(身体语言)进行沟通.它们具有非常强的气味,这样就可以很容易地对远处的其他组成员进行检测.在捕猎时,群体中的非洲野狗通过叫声进行定位.群体成员用发音来帮助协调行动并追踪,其语音特点类似鸟声,是一个不寻常低吼声或唧唧声,直到狩猎成功.非洲猎狗算法(awda)m就是模拟猎狗的这种行为提出的,它以迭代的方式来模拟群体捕猎行为,即寻找最优值.非洲野狗通过初始化猎狗的位置,竞争首领野狗,野狗群协同移动几个步骤来实现求解最优化问题.算法流程图如图1所示
基于野狗优化的机器人路径规划算法基本思想和步骤
-
问题建模:将机器人路径规划问题转化为数学模型,定义目标函数和约束条件。目标函数可以是路径长度最短、时间最短、能耗最低等,约束条件可以包括避开障碍物、遵守限制速度等。
-
野狗群体初始化:随机生成一定数量的野狗个体,每个个体表示一种路径规划方案。每个个体包含表示路径的一组状态或坐标。
-
适应度评估:根据目标函数和约束条件,评估每个野狗个体的适应度,即衡量其路径规划方案的优劣程度。
-
野狗移动:根据野狗群体中个体的适应度,通过模拟野狗的行为进行移动。每个野狗个体都会根据当前的位置和适应度,选择移动到下一个位置。
-
适应度更新:根据野狗移动后的新位置,重新评估各个个体的适应度,并更新最优路径。
-
终止条件:根据预设的终止条件(如达到最大迭代次数、适应度达到要求等),判断是否终止算法。
-
最优路径提取:在算法终止后,选择适应度最好的个体作为最优路径规划方案,并提取其中的路径。
-
可选的后处理:对最优路径进行后处理,如平滑路径、优化路径等,以得到更优的机器人路径规划结果。
需要注意的是,野狗优化算法中的野狗个体移动过程可以通过调整位置或状态来实现,具体实现方式可以根据具体问题进行设计。此外,优化算法的性能还受到参数设置、种群大小等因素的影响,需要进行合理调整和实验验证。
⛄ 部分代码
%_________________________________________________________________________%% Dingo Optimization Algorithm (DOA) source code %% %% Developed in MATLAB 9.4.0.813654 (R2018a) %% %% Author: Dr. Hernan Peraza-Vazquez %% MTA. Gustavo Echavarria-Castillo %% %% e-mail: hperaza@ipn.mx gechavarriac1700@alumno.ipn.mx %% %% Programmer: Dr. Hernan Peraza-Vazquez %% Main paper: %% A Bio-Inspired Method for Engineering Design Optimization Inspired by %% Dingoes Hunting Strategies. %% Mathematical Problems in Engineering. (2021). Hindawi. % %% DOI: doi.org/10.1155/2021/9107547 %%_________________________________________________________________________%function [ o ] = survival_rate( fit, min, max )for i=1:size(fit,2)o(i)= (max-fit(i))/(max-min);endend%_________________________________________________________________________%%[Improves the algorithm by replacing vectors with low survival value with values generated by Eq.6 ]%[The fitness value is normalized]
%_________________________________________________________________________%% Dingo Optimization Algorithm (DOA) source code %% %% Developed in MATLAB 9.4.0.813654 (R2018a) %% %% Author: Dr. Hernan Peraza-Vazquez %% MTA. Gustavo Echavarria-Castillo %% %% e-mail: hperaza@ipn.mx gechavarriac1700@alumno.ipn.mx %% %% Programmer: Dr. Hernan Peraza-Vazquez %% Main paper: %% A Bio-Inspired Method for Engineering Design Optimization Inspired by %% Dingoes Hunting Strategies. %% Mathematical Problems in Engineering. (2021). Hindawi. % %% DOI: doi.org/10.1155/2021/9107547 %%_________________________________________________________________________%function [ vAttack ] = vectorAttack( SearchAgents_no,na )c=1;vAttack=[];while(c<=na)idx =round( 1+ (SearchAgents_no-1) * rand());if ~findrep(idx, vAttack)vAttack(c) = idx;c=c+1;endend%_________________________________________________________________________%%[Used in the Strategy 1: Group Attack, Eq. 2, Section 2.2.1]%
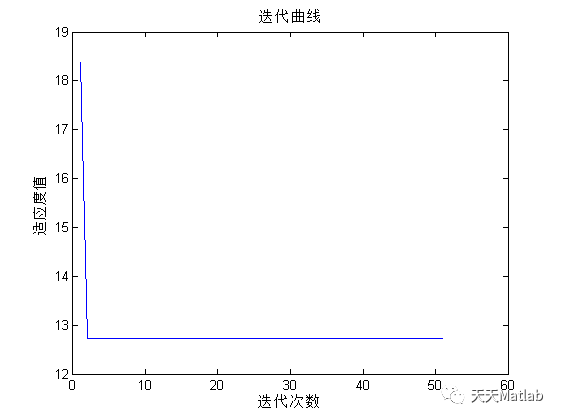
⛄ 运行结果

⛄ 参考文献
[1] 王菁华,张翠敏.智能机器人综合路径规划算法在Matlab中的实现[J].天津工程师范学院学报, 2006, 16(3):4.DOI:10.3969/j.issn.2095-0926.2006.03.012.
[2] 吴宪祥,郭宝龙,王娟.基于粒子群三次样条优化的移动机器人路径规划算法[J].机器人, 2009, 31(6):5.DOI:10.3321/j.issn:1002-0446.2009.06.013.
[3] 张毅,刘杰.一种基于优化混合蚁群算法的机器人路径规划算法:CN201711121774.X[P].CN107917711A[2023-07-10].
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
🍅 仿真咨询
1.卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
2.图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
3.旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划
4.无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
5.传感器部署优化、通信协议优化、路由优化、目标定位
6.信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号
7.生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化
8.微电网优化、无功优化、配电网重构、储能配置
9.元胞自动机交通流 人群疏散 病毒扩散 晶体生长
这篇关于路径规划算法:基于野狗优化的机器人路径规划算法- 附matlab代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







