本文主要是介绍【VisionMaster】N点标定衍生之双相机融合测量,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 背景
在实际的项目中可能会出现一下情况,待检测产品较大,单个相机在满足精度要求的前提下无法覆盖完整的视野。这时,需要使用两个或多个相机进行拍摄,每个相机的视野仅覆盖待检测产品的一部分。最终,将检测结果映射到同一个物理坐标系下,并完成相关的检测要求。
2. 仿真
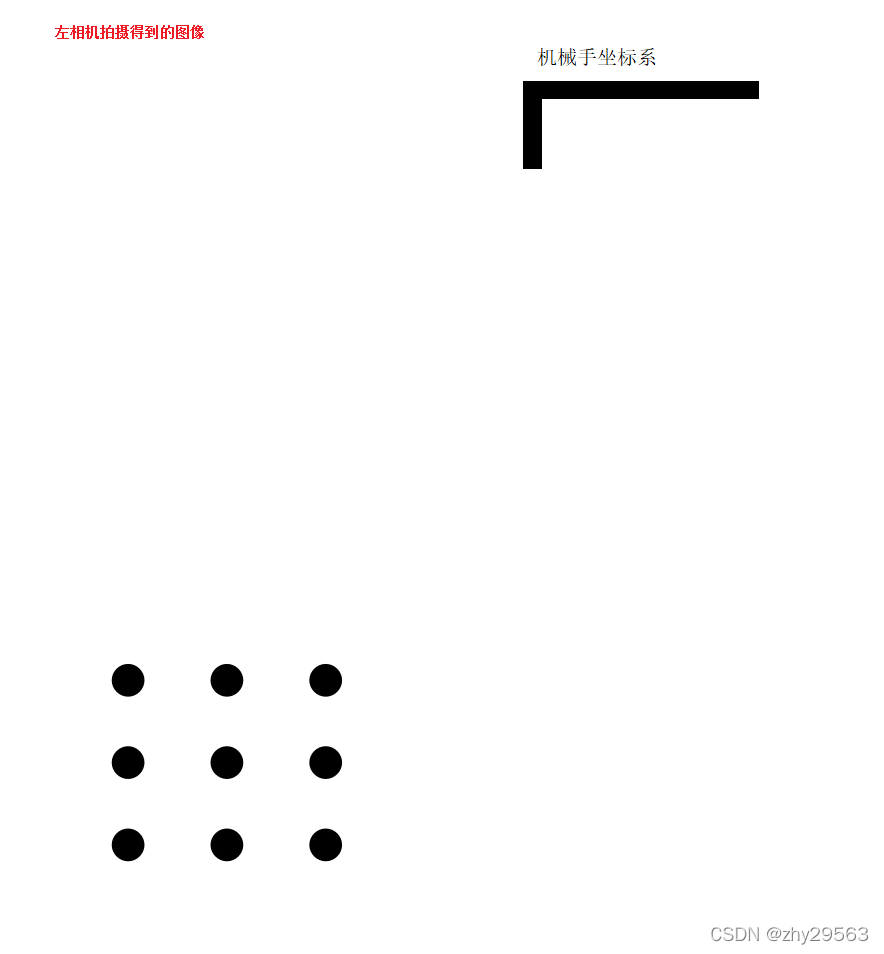
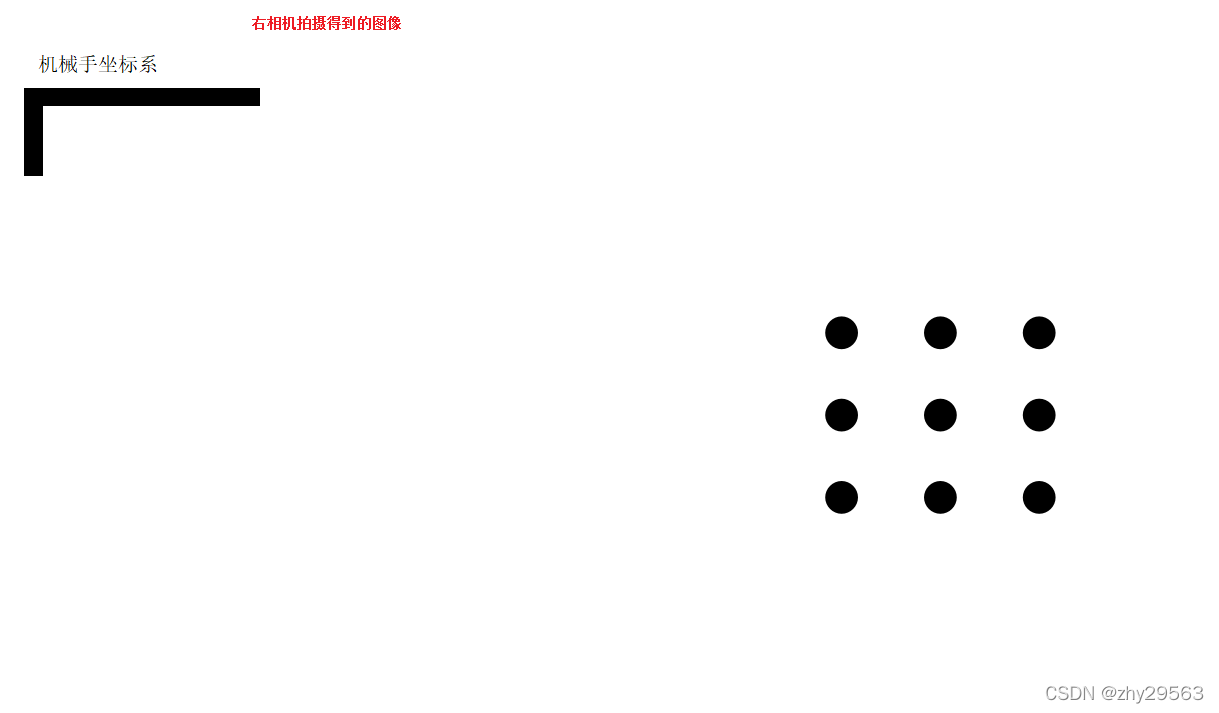
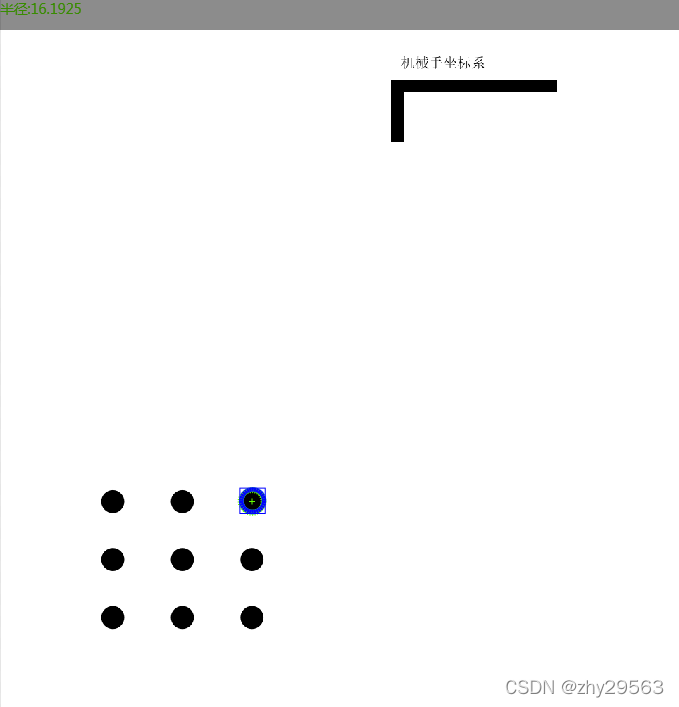
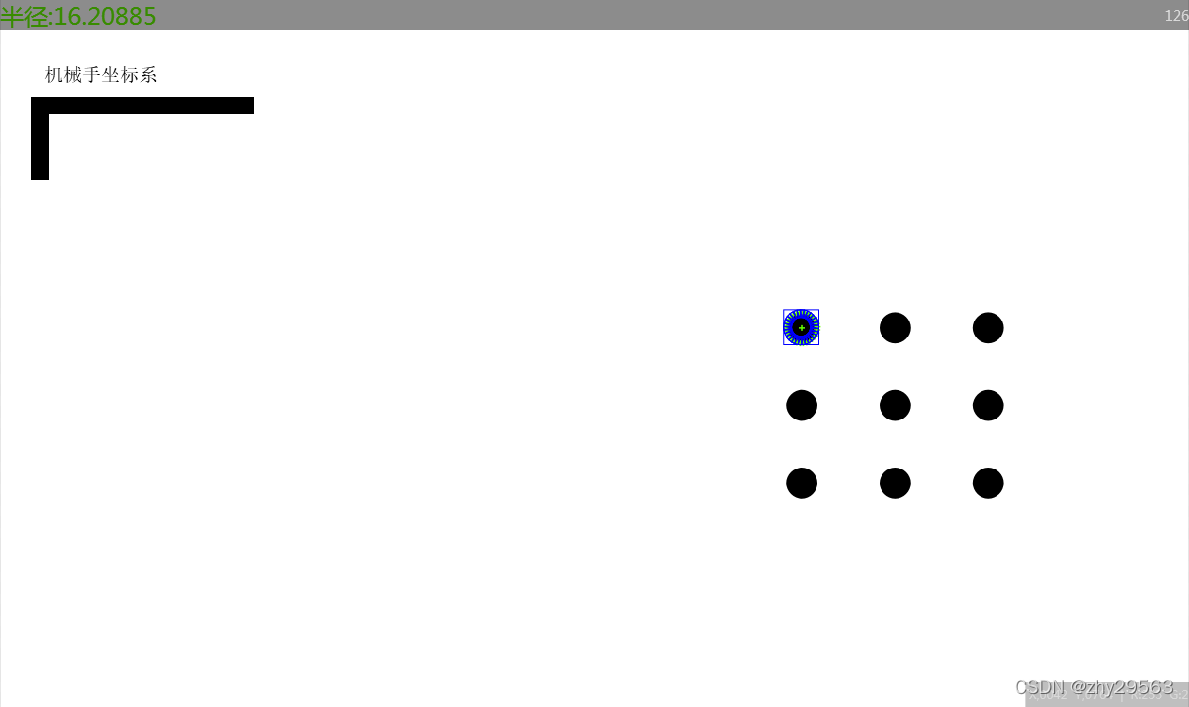
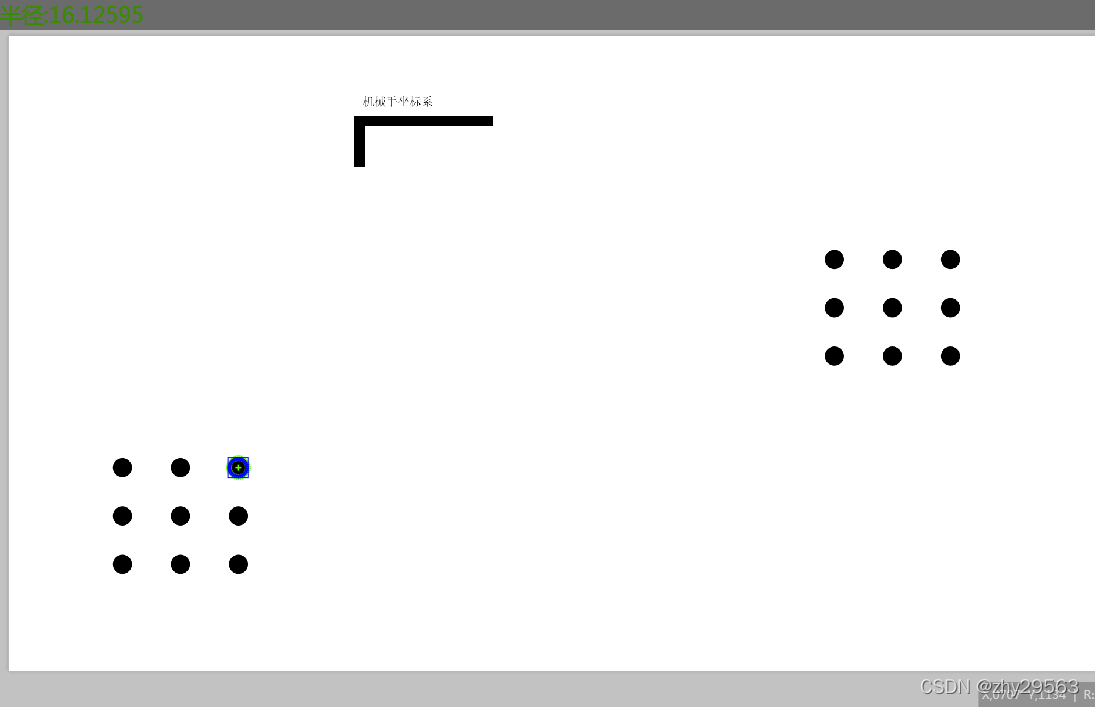
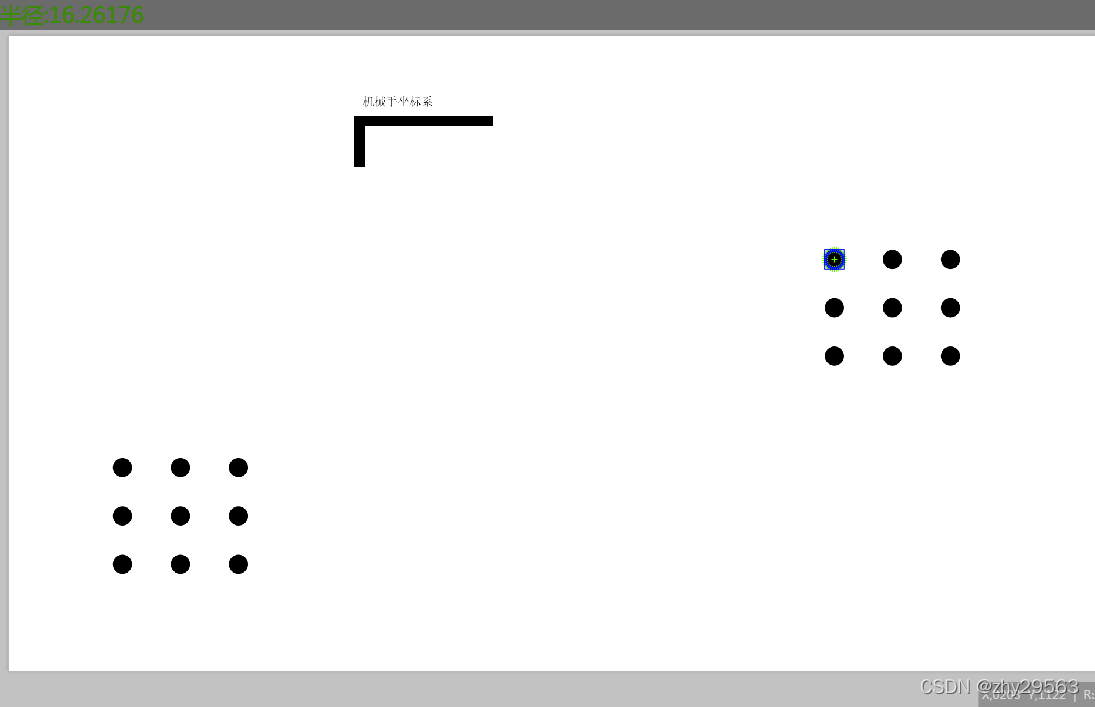
为模拟背景中所描述的情况,绘制了如下图像,目标是计算两个红色框标注出来的两个圆特征中心的距离。由于视野与精度的要求,这里使用左相机与右相机分别拍摄其中的一部分。
- 上侧的
L表示机械手坐标系(X轴向右,Y轴向下) - 左侧九个点是用于通过N点标定获取左相机的像素坐标系与机械手坐标系之间的映射关系的特征点
- 右侧九个点是用于通过N点标定获取右相机的像素坐标系与机械手坐标系之间的映射关系的特征点

3. 方案配置
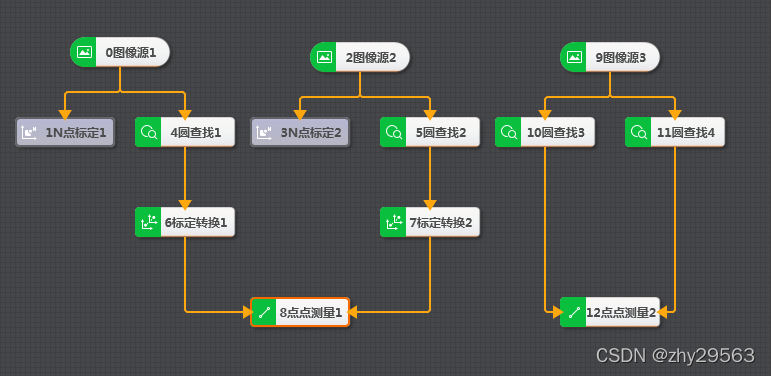
- 以
图像源1开始的流程模拟左相机的处理流程 - 以
图像源2开始的流程模拟右相机的处理流程 - 以
图像源3开始的流程用于结果的验证
4. 左流程
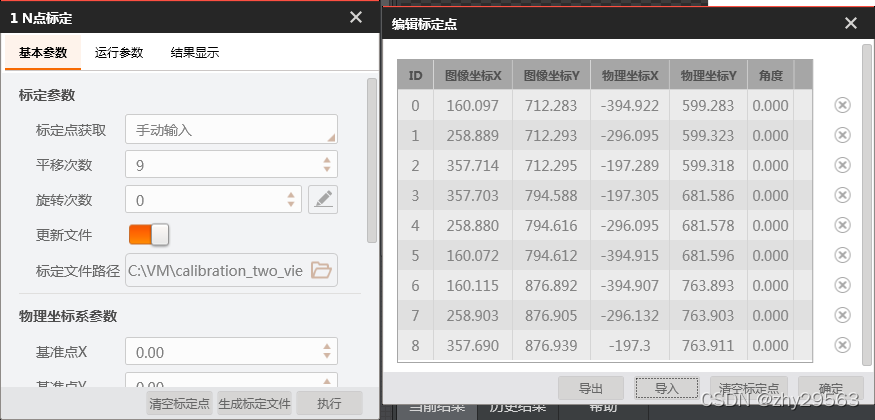
4.1 N点标定
4.2 圆查找
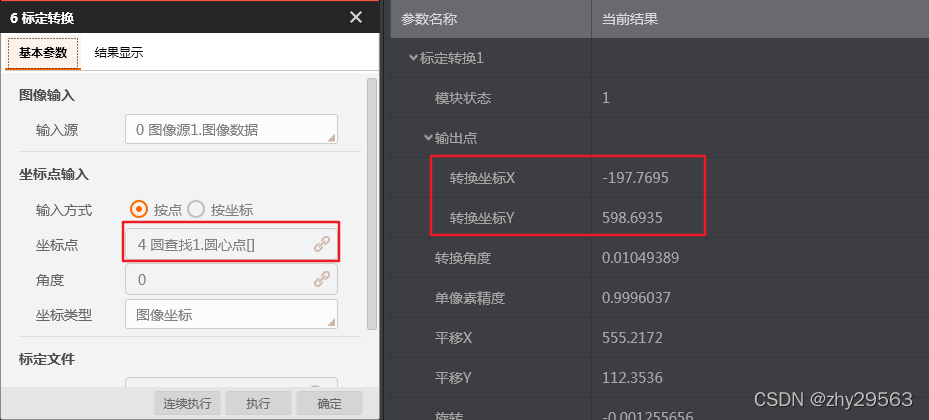
4.3 标定转换
5. 右流程
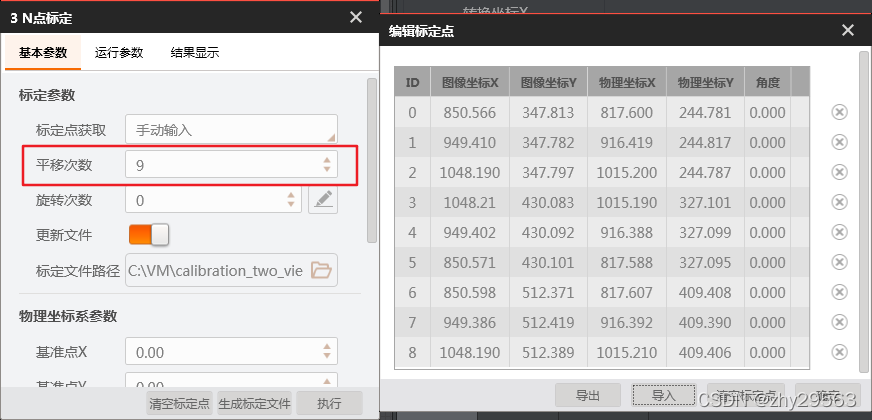
5.1 N点标定
5.2 圆查找
5.3 标定转换

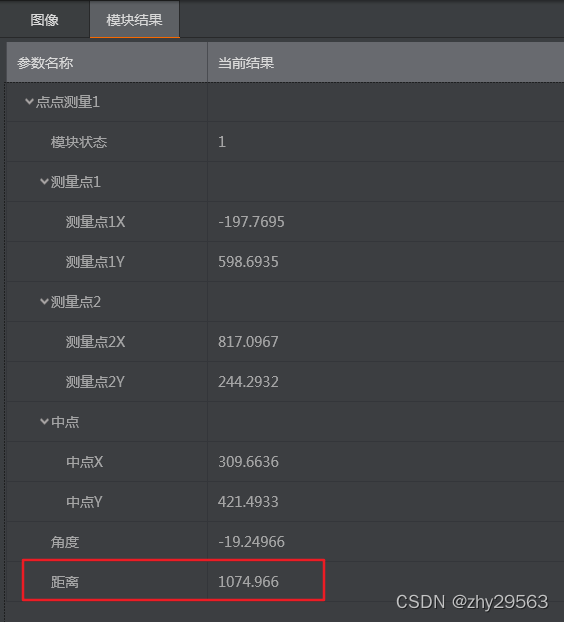
6. 点点测量
7. 验证流程
7.1 圆查找3
7.2 圆查找4
7.3 点点测量


这篇关于【VisionMaster】N点标定衍生之双相机融合测量的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!