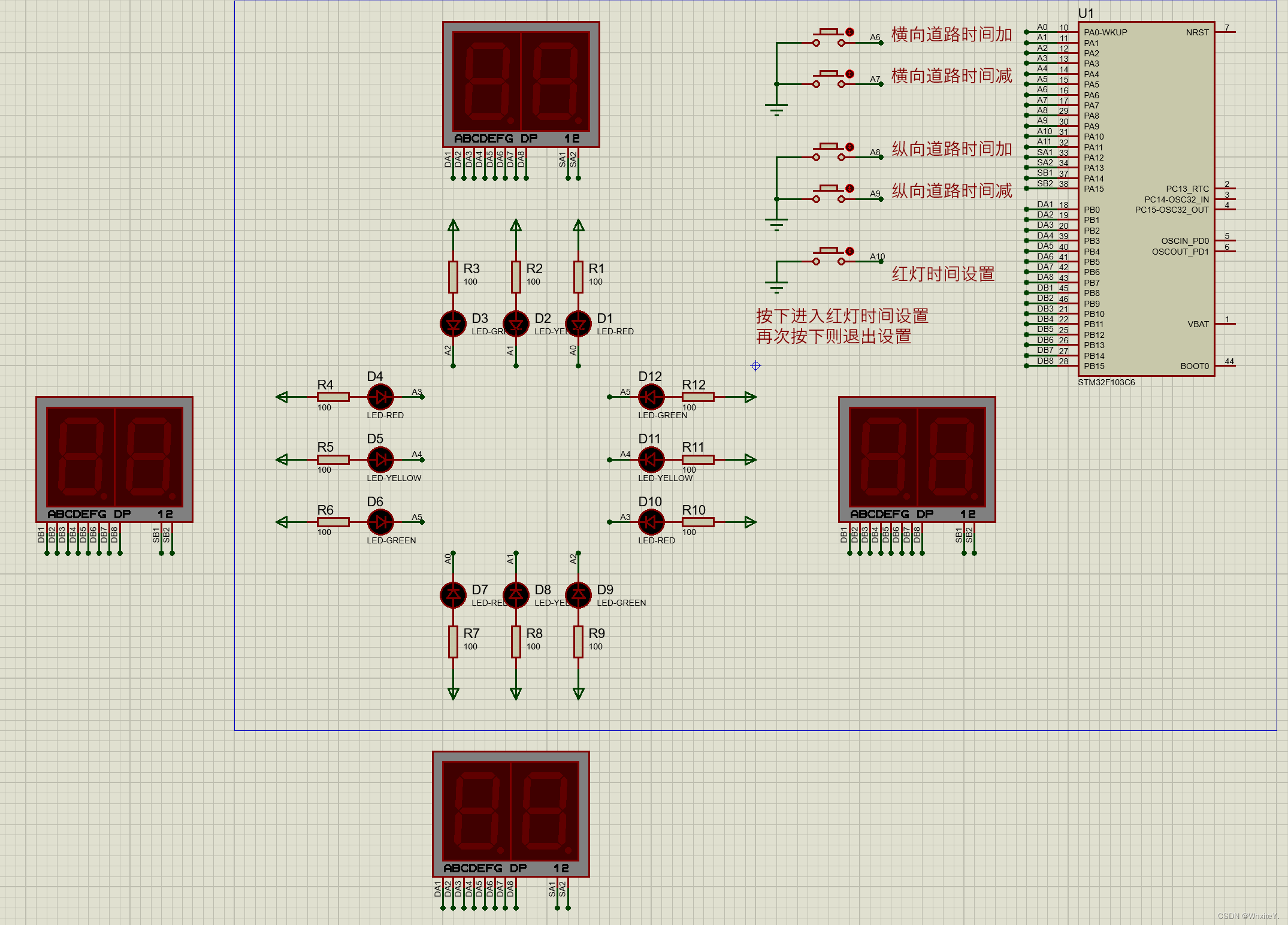
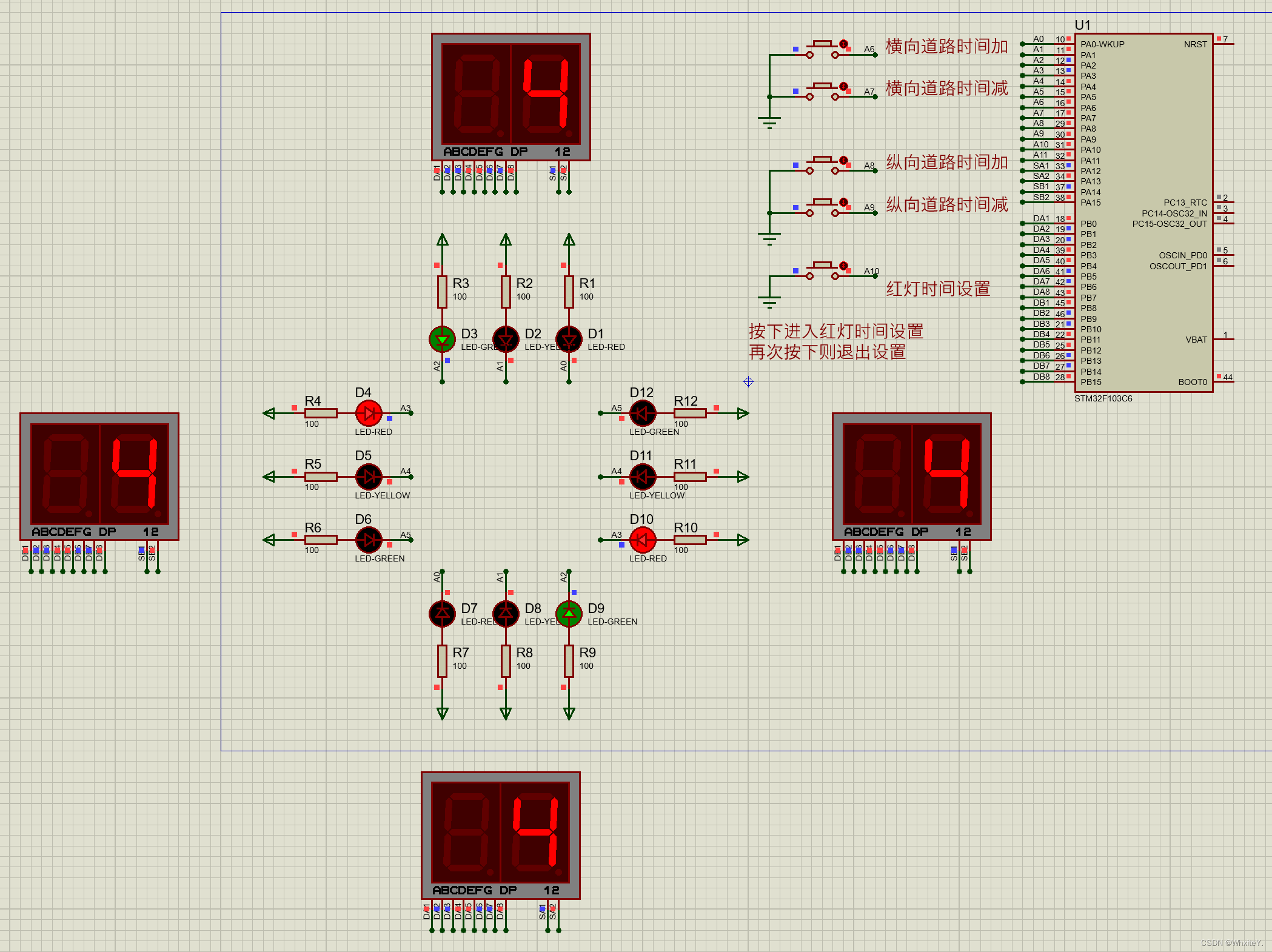
本文主要是介绍Proteus仿真——基于STM32设计的交通灯(可分别修改纵向与横向道路的红灯时间,含仿真文件及代码),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
最近在整理资料,偶然找到了一个曾经帮某位学妹做的STM32大作业,当时说好的请我喝果茶呢,后来不了了之,被白嫖了,可恶!
由于当时时间匆忙,这个交通灯项目里没有写亮黄灯的代码,即在运行时,红灯将会直接跳转为绿灯,没有黄灯过渡时间。如有相关需求,可根据需要,自行魔改代码(代码和仿真文件见文末)。
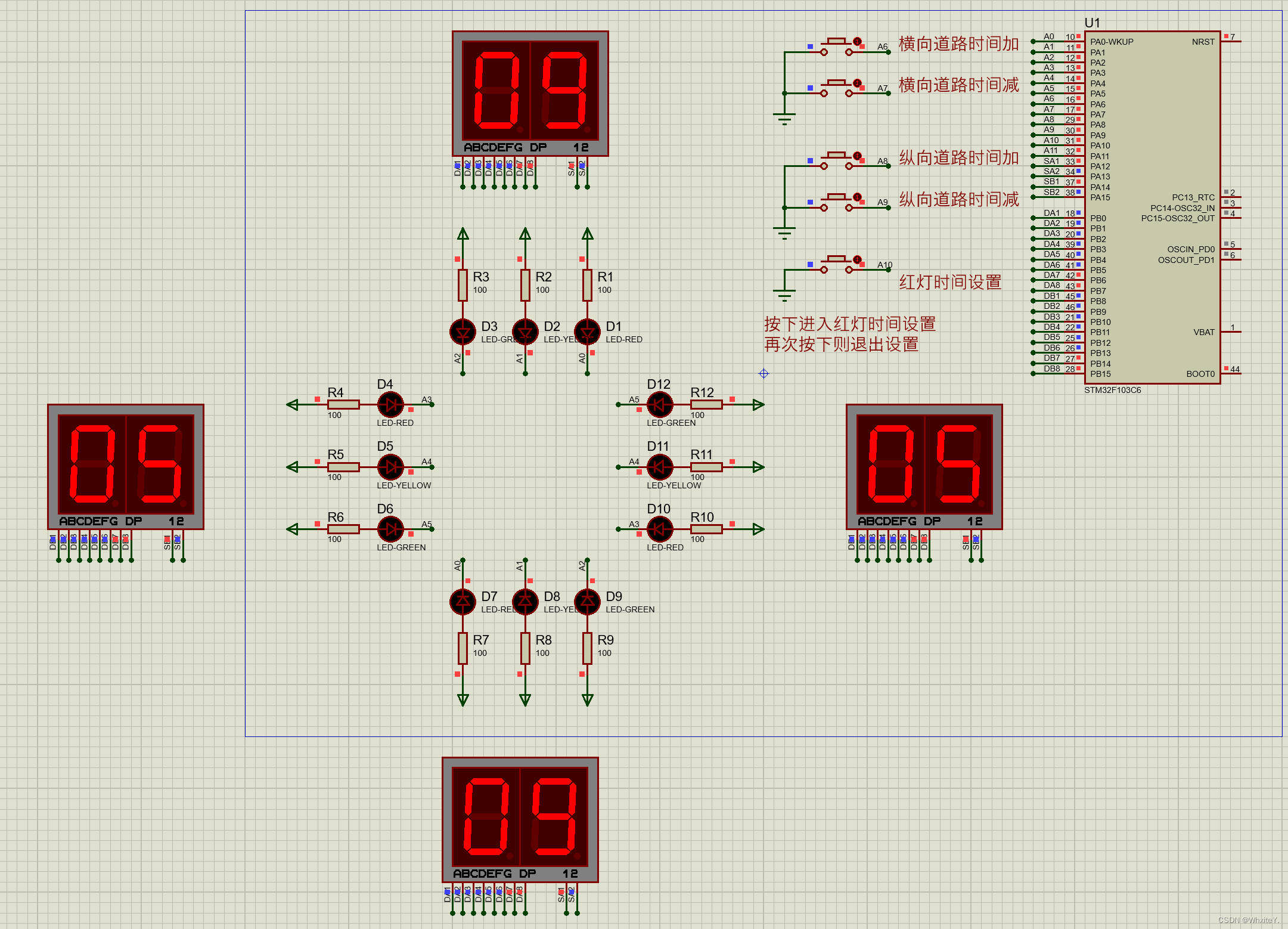
按下红灯时间设置按钮,进入红灯时间设置状态,此时点击横/纵向时间加/减即可分别设置横向或纵向道路的红灯时间,再次按下则保存退出设置,并立即生效。
运行图如下:
注意:项目所使用的Proteus版本为8.9,低于该版本可能导致无法打开仿真图。
资料已经永久共享,如下自取。
链接:https://pan.baidu.com/s/13_HXpIUpitxDud1flJnrbA
提取码:tvlp
这篇关于Proteus仿真——基于STM32设计的交通灯(可分别修改纵向与横向道路的红灯时间,含仿真文件及代码)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






