本文主要是介绍大学物理-实验篇——用拉伸法测定金属丝的杨氏(弹性)模量(胡克定律、杨氏模量、平面反射镜、三角函数、螺旋测微器),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
预备知识
力学:胡克定律(Hooke's law)
材料力学:杨氏模量
光学:平面反射镜
数学:三角函数
螺旋测微器
实验目的
实验仪器
实验原理
1.拉伸法测杨氏弹性模量
2.光杠杆放大法测量微小伸长量
3.杨氏模量
实验步骤
1.测量金属丝直径d
2.调整支架位置,调节底座水平
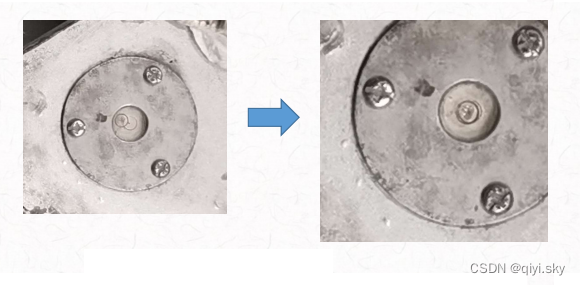
3.放置光杠杆镜架,调节镜面竖直
4.调整镜尺组,直到清晰看到标尺
5.增减砝码,记录望远镜内刻度读数
6.测量刻度尺到反射镜间距D
7.测量光杠杆转动半径 l
8.测量金属丝的长度L
预备知识
第一个预备知识是中学就学习过的胡克定律,简单看一下公式
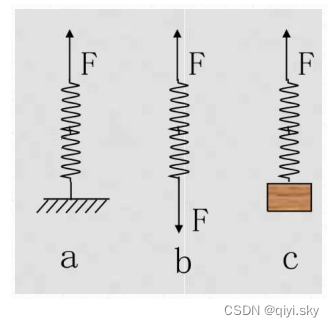
力学:胡克定律(Hooke's law)
- 弹性限度内
- 抵抗力
- 形变方向相反
材料力学:杨氏模量
第二个是材料力学的:杨氏模量Young's modulus(1807) (拉伸模量)
- 描述固体材料抵抗形变能力的物理量
- 外力作用下材料产生弹性形变/塑性形变
- 弹性形变下应变(形变)程度与外力成正比

- 以单位面积上承受的力表示,单位为
- 杨氏模量的大小标志了材料的刚性
- 测量:动态法/静态法
光学:平面反射镜
- 直线传播
- 反射角=入射角
- 光路可逆
- 镜面转动角度vs出射光线转动角度

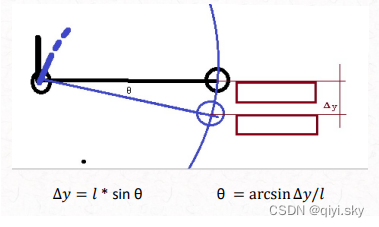
数学:三角函数
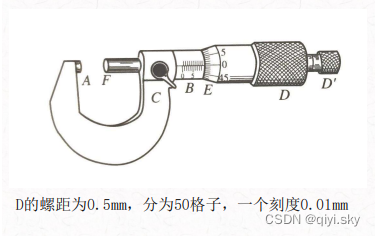
螺旋测微器
螺旋测微器的测砧A和固定刻度B固定在尺架C上;
可动刻度 E、旋钮微调旋钮D'是与测微螺杆 F 连在一起的,通过精密螺纹套在B上。
- 解除锁定
- 使用前,判断零误差
- 转动开口,略大于待测物
- 慢速转动D',直到听到"喀喀"的声音
- 锁定读数,杆上和螺旋读数
- 解锁松开,取下待测物
- 锁定 收回盒中
螺旋测微器的读数方法:
1.读出固定套筒上露出的刻线尺寸,一定要注意不能遗漏应读出的0.5mm刻线值。

2、读出微分筒上的尺寸,要看清微分筒圆周上哪一格与固定套筒的中线基准对齐,将格数乘0.01mm既得微分筒上的尺寸。

3、将上面的两个读数相加,即为螺旋测微器(千分尺)上测得尺寸。

实验目的
- 学习用拉伸法测杨氏模量的方法;
- 学习光杠杆放大法测微小长度变化的原理和方法;
- 掌握千分尺、望远镜的使用方法;
- 学习用逐差法处理数据;
- 学习正确选择测量仪器,从而体会误差理论对实验的指导意义。
实验仪器
- 杨氏模量测定仪
- 光杠杆
- 砝码
- 望远镜尺组
- 螺旋测微器
- 卷尺

实验原理
1.拉伸法测杨氏弹性模量
给物体施以力的作用,物体将发生形变,在弹性限度范围内应变与应力的大小成正比,其比例系数的倒数即为杨氏模量,又称弹性模量。
以长度为、横截面积为
的金属丝为例,在外力
的作用下,金属丝伸长量为
,在弹性限度范围内,则有

- E:金属丝的杨氏模量
- 单位:为
- 仅与材料的性质有关
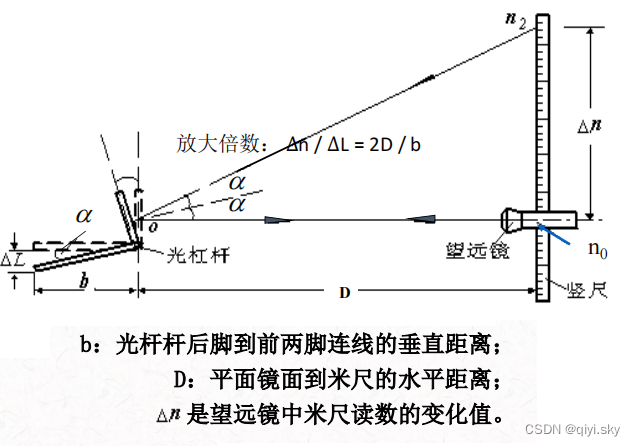
2.光杠杆放大法测量微小伸长量
光杠杆放大法是一种利用光学原理把微小长度的变化加以放大后,再进行测量的方法。
光杠杆放大法利用光杠杆放大装置将微小长度的变化放大为望远镜中标尺读数的变化。光杠杆放大装置包括光杠杆和镜尺组。
3.杨氏模量
将金属丝截面积代入,即可得到待测金属丝的杨氏模量公式为:
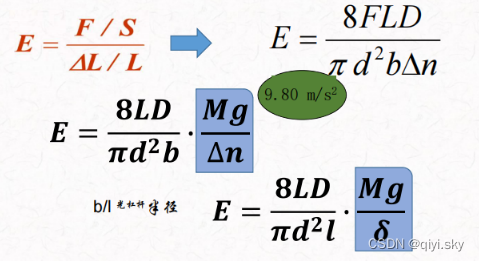
杨氏模量的金属丝,观测到的位置变化
满足:
实验步骤
1.测量金属丝直径d
上中下的位置测量各两个数据,读数格式:0.###mm
| d | 上 | 中 | 下 | 平均 | |||
|---|---|---|---|---|---|---|---|
| Mm | 1 | 2 | 1 | 2 | 1 | 2 | |
2.调整支架位置,调节底座水平
- 尽量远离实验台
- (杆平面)正对实验台
- 调平水平仪:气泡偏移的方向较高
3.放置光杠杆镜架,调节镜面竖直
- F2、F3卡槽
- 拉长尾杆,F1托台
- 镜前旋钮调反射镜竖直

4.调整镜尺组,直到清晰看到标尺
镜架位置及高度
- 正对支架,在中垂线上
- 望远镜下缘与支架中平台平齐
开灯(红色激光)
- 对准镜面,反射点落于尺上等高
- 光点在支架轴对侧
- 转镜筒调光点左右
- 微调平面镜调光点高度

开灯(无激光)
- 找绿光:微调望远镜方向
- 找刻度:调节焦距
调刻度尺高度
- 对0点:接近最佳
- 调刻度尺高度:确保7砝码的最大偏转刻度可读取
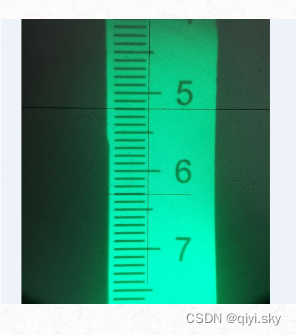
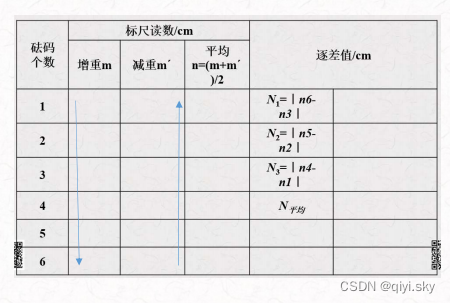
5.增减砝码,记录望远镜内刻度读数
砝码数: 0-1-2-3-4-5-6-7-6-5-4-3-2-1-0
注意:
- 勿碰触支架和镜架
- 砝码错位对放
- 砝码盘稳定后读数
- 砝码的质量精度 读数:± ##.# mm
M=1.000±0.001(Kg)
6.测量刻度尺到反射镜间距D
- 移除砝码后测量
- 镜面到镜架轴
- 卷尺水平拉直
读数: ####.# mm
| D | 左 | 上 | 右 | 平均 |
|---|---|---|---|---|
| Mm |
7.测量光杠杆转动半径 l
- 整体轻拿光杠杆
- 纸面拓印三点标记
- 规作图量垂距 l (计算F1到F2、F3连线的垂距)
读数: ##.# mm
| l | 左 | 上 | 右 | 平均 |
|---|---|---|---|---|
| Mm |
8.测量金属丝的长度L
- 上下夹线柱平面间距
- 拉直后测量(误差)
- 卷尺使用(卷尺抵紧一侧台面,卷尺拉直后读差值)
读数:####.# mm
| L | 左 | 上 | 右 | 平均 |
|---|---|---|---|---|
| Mm |
END
这篇关于大学物理-实验篇——用拉伸法测定金属丝的杨氏(弹性)模量(胡克定律、杨氏模量、平面反射镜、三角函数、螺旋测微器)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









