本文主要是介绍【小黑嵌入式系统第十二课】μC/OS-III程序设计基础(二)——系统函数使用场合、时间管理、临界区管理、使用规则、互斥信号量,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
上一课:
【小黑嵌入式系统第十一课】μC/OS-III程序设计基础(一)——任务设计、任务管理(创建&基本状态&内部任务)、任务调度、系统函数
文章目录
- 一、系统函数使用场合
- 1.1 时间管理
- 1.1.1 控制任务的执行周期
- 1.1.2 控制任务的运行节奏
- 1.1.3 状态查询
- 1.2 资源同步
- 1.2.1 “资源同步”图解
- 1.2.2 “资源同步” 实现方式
- 1.3 行为同步
- 1.3.1 行为同步
- 1.3.2 数据通信
- 二、时间管理
- 2.1 概述
- 2.2 `OSTimeDly()`
- 2.3 `OSTimeDlyHMSM()`
- 2.4 `OSTimeDlyResume()`
- 2.5 `OSTimeGet()`、`OSTimeSet()`
- 三、临界区管理
- 3.1 进入然后退出临界区
- 3.2 禁止然后允许调度
- 四、事件的一般使用规则
- 4.1 相似性
- 4.2 先创建后使用
- 4.3 配对使用
- 4.4 在ISR中使用
- 五、互斥信号量
- 5.1 简介
- 5.2 资源同步
一、系统函数使用场合
1.1 时间管理
1.1.1 控制任务的执行周期
在任务函数的代码中可以通过插入延时函数来控制任务周期性运行,定时闲置CPU一段时间,供其它任务使用。

注意:延时函数OSTimeDly()是以系统节拍数为参数,而延时函数OSTimeDlyHMSM()是以实际时间值为参数,但在执行过程中仍然转换为系统节拍数。如果实际时间不是系统节拍的整数倍,将进行四舍五入处理。设系统节拍为50毫秒,调用OSTimeDly(20)的效果是延时1秒钟,调用OSTimeDlyHMSM(0,1,27,620)的实际时间是延时1分27秒600毫秒。
1.1.2 控制任务的运行节奏
在任务函数的代码中也可以通过插入延时函数来控制任务的运行节奏。

1.1.3 状态查询
查询过程是一个无限循环过程,只有当希望的状态出现以后才能退出这个无限循环,这种情况在实时操作系统管理下是不允许的,它将剥夺低优先级任务的运行机会。解决这个问题的办法是“用定时查询代替连续查询” 。

1.2 资源同步
1.2.1 “资源同步”图解

1.2.2 “资源同步” 实现方式
- 使用关中断:通过调用禁止中断函数
OS_CRITICAL_ENTER()和允许中断函数OS_CRITICAL_EXIT()实现的。 - 使用关调度:通过调用禁止任务调度函数
OSSchedLock()和允许任务调度函数OSSchedUnlock()实现的,因为禁止调度违背了多任务的初衷,所以不建议用户使用。 - 使用信号量与互斥信号量:通过等待信号量和发送信号量实现共享资源的独享。
1.3 行为同步
1.3.1 行为同步
一个任务的运行过程需要和其它任务的运行配合,才能达到预定的效果,任务之间的这种动作配合和协调关系称为“行为同步”。

1.3.2 数据通信

注意:尽管指针可能是局部变量,但只要指针指向的变量是全局变量,操作指针指向的变量时也需要当作全局变量来处理。
二、时间管理
2.1 概述
μC/OS-III提供了若干个时间管理服务函数,可以满足任务在运行过程中对时间管理的需求。在使用时间管理服务函数时,必须十分清楚一个事实:时间管理服务函数是以系统节拍为处理单位的,实际的时间与希望的时间是有误差的,最坏的情况下误差接近一个系统节拍。因此时间管理服务函数只能用在对时间精度要求不高的场合,或者时间间隔较长的场合。
2.2 OSTimeDly()
系统延时函数OSTimeDly()调用图解:

下面我们设计一个任务,让一个LED以50个时钟节拍为单位闪烁,说明OSTimeDly()函数的用途。由于篇幅关系,只给出任务主要处理代码。

注意:上面的设计是OSTimeDly() 控制任务的周期性执行,还可以用它来控制任务的运行节拍。
2.3 OSTimeDlyHMSM()
μC/OS-III提供了OSTimeDlyHMSM()系统延时函数,这个函数是以小时(H)、分(M)、秒(S)和毫秒(m)四个参数来定义延时时间的,函数在内部把这些参数转换为时钟节拍,再通过单次或多次调用OSTimeDly()进行延时和任务调度,所以延时原理和调用延时函数OSTimeDly()是一样的。
为了说明OSTimeDlyHMSM()函数的使用方法,下面我们设计一个任务,让一个LED以2Hz的频率闪烁。下面给出任务主要处理代码。

注意:上面的设计是**OSTimeDlyHMSM()**控制任务的周期性执行,还可以用它来控制任务的运行节拍。
2.4 OSTimeDlyResume()
µC/OS-III允许用户结束任务正处于的延时期,延时的任务可以不等待延时期满,而是通过其它任务取消其延时来使其处于就绪态,通过调用OSTimeDlyResume()和指定要恢复的任务来完成。

为了说明OSTimeDlyResume()函数的使用方法,我们设计一个系统。TaskLED任务让一个LED以0.5Hz的频率闪烁;按键任务处理按键事件,每按键一次,LED状态立即翻转一次。下面是两个任务的处理流程。

TaskLED任务代码如下:

TaskKEY任务的代码如下:

2.5 OSTimeGet()、OSTimeSet()
无论时钟节拍何时发生,µC/OS-III都会将一个32位的计数器加1,这个计数器在用户调用OSStart()初始化多任务时和4,294,967,295个节拍执行完一遍的时候从0开始计数。

用户可以通过调用OSTimeGet()来获得该计数器的当前值, OSTimeGet()的详细信息见下表。


用户可以通过调用OSTimeSet()来改变计数器的值,OSTimeSet()的详细信息见下表。


为了说明OSTimeGet()函数的使用方法,我们设计一个任务,计算两次按键的时间间隔放在全局变量ktime中。下面是任务的处理流程。

TaskKEY任务代码如下:

三、临界区管理
3.1 进入然后退出临界区
进入然后退出临界段是“资源同步”的方法之一,能够在访问共享资源时保障信息的可靠性和完整性。

为了说明它在”资源同步”时的使用,我们设计一个系统,假设有两个任务,它们都对全局变量sum1和sum2操作。低优先级任务让这两个变量始终相等,并不断在计数;高优先级任务不断的判断这两个变量是否相等,不相等则点亮LED,下面是两个任务的处理流程。

TaskLED任务代码如下:

TaskAdd任务代码如下:

3.2 禁止然后允许调度
给调度器上锁OSSchedlock()函数用于禁止任务调度,直到任务完成后调用给调度器开锁OSSchedUnlock()函数为止。使用它有3点需要注意。
OSSchedlock()和OSSchedUnlock()必须成对使用,也可以嵌套使用;OSSchedlock()只是禁止了任务的调度,而没有禁止中断,此时如果允许中断,中断到来时还是会执行对应的中断服务程序;- 调用
OSSchedLock()以后,用户的应用程序不得使用任何能将现行任务挂起的系统调用,直到配对的OSSchedUnlock()调用为止。
注意:对于用户来说,极少使用禁止然后允许调度的方法。不过,很多操作系统内部和驱动程序使用它来减少中断响应时间。
四、事件的一般使用规则
4.1 相似性
事件管理函数是μC/OS-III中最多的系统函数,而且每种事件具有的管理函数数目不同。但是所有的事件都有类似的4个函数,它们是所有事件的基本功能,其函数名类似,使用方法也类似,详细函数见下表。

4.2 先创建后使用
任何一个事件,必须先创建后使用。创建事件是通过调用函数OS???Create()实现的,其中???为事件的类型。创建事件可以在main()函数中,但更多的是在任务初始化部分。使用方法如下。

一般来说,在嵌入式系统中,事件是静态使用的,即创建后永远不删除。但有时候需要动态使用,即根据需要创建和删除事件,此时创建事件就是在任务的事件执行代码中,使用方法如下。

4.3 配对使用
下面给出一个示例,假设Task0为高优先级任务,Task1为低优先级任务。 Task0代码如下。

Task1代码如下:

4.4 在ISR中使用
要掌握事件函数在中断服务程序中的调用规则,我们必须清楚中断服务有哪些特点。
- 中断与所有的任务异步
- 中断服务程序总体是顺序结构
- 中断服务程序需要尽快退出
- 中断服务程序不能等待
下面给出事件在中断服务程序中使用方法,假设Task0任务接收ISR发送的消息,任务代码如下。

ISR中的代码如下:

注意:
- 中断服务程序一般不会调用建立和删除事件函数,否则要么没有起到事件的作用,要么程序很复杂;
- 中断服务程序不能调用等待事件的函数,否则可能造成程序崩溃。
五、互斥信号量
5.1 简介
在日常生活中,出租车是一种常用的共享资源,当出租车载客时,从外面可以看到标识为载客;当空闲时,标识为空车。这样等车的人就可以根据标识知道出租车的当前状态,判断是否能够座上这辆车。这个标识牌就是一个二值信号量。由于这种二值信号量可以实现对共享资源的独占式处理,所以叫做互斥信号量。

互斥信号量也称为mutex,专用于资源同步。互斥信号量具有一些特性:占用一个空闲优先级,以便解决优先级反转问题。
假设任务1和任务3共享一个资源,任务2为优先级介于任务1和任务3之间的一个与该共享资源无关任务,分析优先级反转问题。

此时,只要任务3没有释放共享资源,即使任务1比任务2优先级更高,但却在任务2之后运行,这种现象就是优先级反转。
并且在任务1等待共享资源期间,任务2就绪时可剥夺任务3的运行,导致额外增加了任务1的等待时间,这被称为无界优先级反转,因任何一个(介于任务1、3之间的)中等优先级的任务都可以延长任务1的等待时间。
假设任务1和任务3共享一个资源,使用互斥信号量进行资源同步,任务2为优先级介于任务1和任务3之间的一个与该共享资源无关任务,通过互斥信号量解决优先级反转问题。
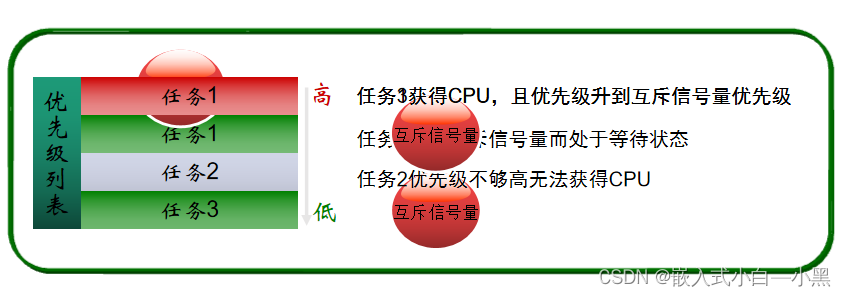
此时,任务2无法在任务1之前得到运行,不发生优先级反转
综上所述,可以说能防止优先级反转现象的信号就是互斥信号量。
使用互斥信号量有以下3点需要注意:
-
在嵌入式系统中,经常使用互斥信号量访问共享资源来实现资源同步。而用来实现资源同步的互斥信号量在创建时初始化,这是由
OSMutexCreate ()函数来实现的; -
OSMutexPost ()发送互斥信号量函数与OSMutexPend ()等待互斥信号量函数必须成对出现在同一个任务调用的函数中,因此我们需要编写一个公共的库函数,因为有多个任务可能调用这个函数 ; -
信号量最好在系统初始化的时候创建,不要在系统运行的过程中动态地创建和删除。在确保成功地创建信号量之后,才可对信号量进行接收和发送操作。
5.2 资源同步
为了说明使用互斥信号量访问共享资源实现资源同步,设计两个任务,它们在不同的音符按键按下期间让DAC输出不同的音符声音,要求这两个任务不会互相干扰。下面是两个任务的处理流程。

为了实现资源同步,我们需要保证OSMutexPost()与OSMutexPend()成对出现在同一个任务函数中,所以我们编写一个库函数DAC()供两个任务调用,代码如下。

下面给出两个DAC任务的主要处理代码:

使用互斥信号量做共享资源的管理,可参考示例程序:“Micrium_CY8CKIT-050B_uCOS-III-LCDMutex_GNU(PSoC Creator 4.0).rar”
这篇关于【小黑嵌入式系统第十二课】μC/OS-III程序设计基础(二)——系统函数使用场合、时间管理、临界区管理、使用规则、互斥信号量的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





