本文主要是介绍其实弄清楚原理之后,我还可以用单摄像头做SLAM,用单摄像头返回坐标点,来实现无人机的定点。,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
其实弄清楚原理之后,我还可以用单摄像头做SLAM,用单摄像头返回坐标点,来实现无人机的定点。
可以自己灵活改动。
就不会局限于别人已有的方案或者只会copy别人现成的方案。
我看ROS上别人实现单摄像头的轨迹也挺不错的,之前B站上也看过。
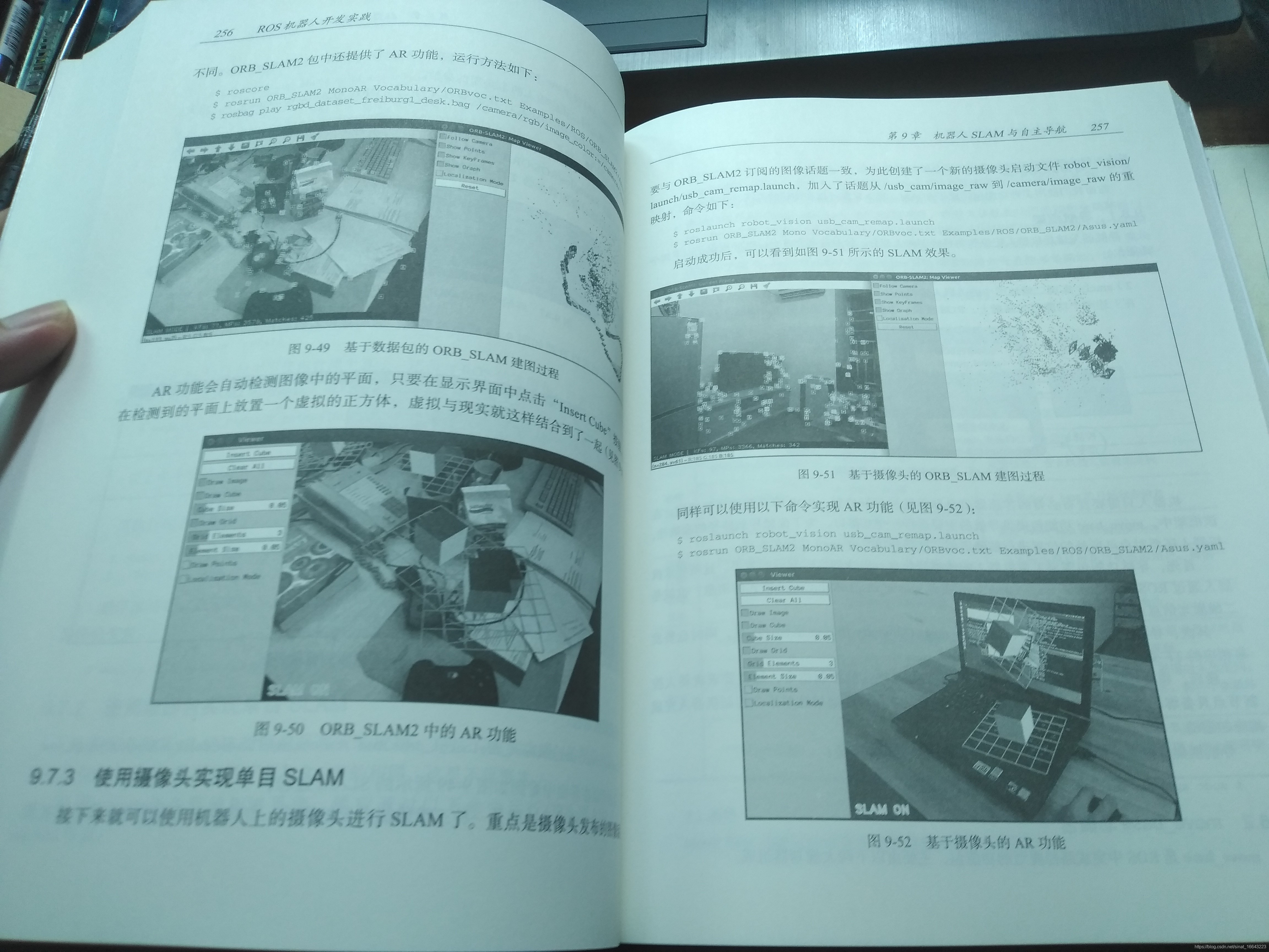
这是古月的《ROS机器人开发实践》刚买到手
这是之前B站看的视频

。
这篇关于其实弄清楚原理之后,我还可以用单摄像头做SLAM,用单摄像头返回坐标点,来实现无人机的定点。的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






