本文主要是介绍路径规划-快速搜索随机树(Rapid-exploration Random Tree),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本节介绍机器人路径规划领域的一个重要的方法,快速搜索随机树法,这种方法在机器人规划领域,尤其是高维环境(机械臂,飞行器)的规划中,占有重要的位置,是基于采样的规划方法的一种。
简介:
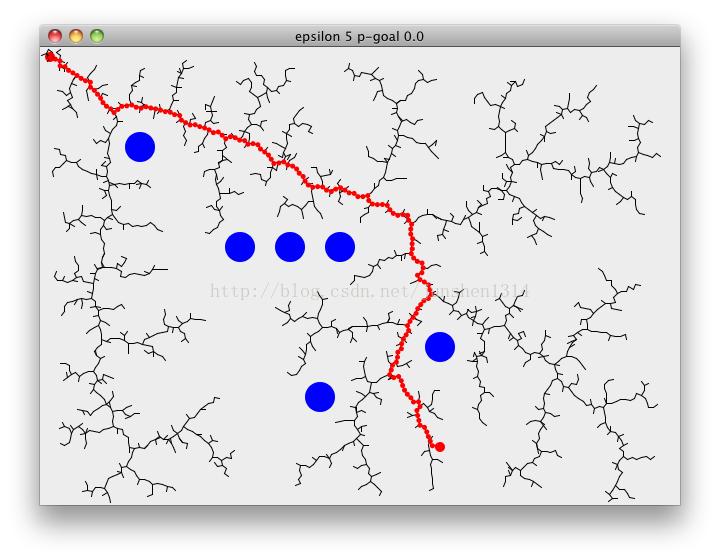
快速搜索随机树,就是在环境中随机撒一些点,这些点经过算法运算,最终可以连接起来,变成机器人可以运行的轨迹。
二 算法介绍:
1.基本算法流程
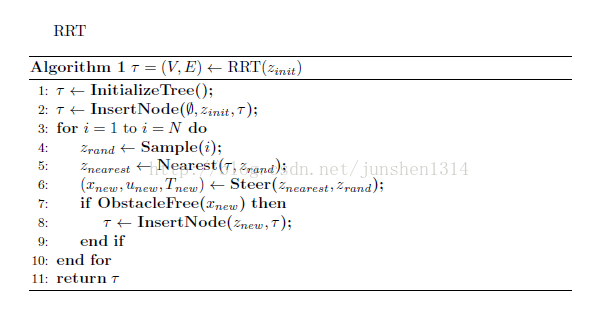
2.算法介绍
x_init-->x_new---->x_rand
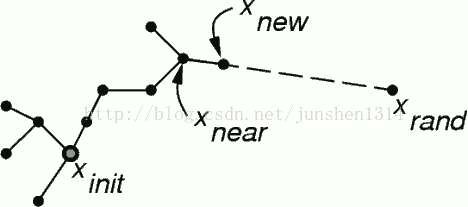
如图所示,为讲述方便,我们以二维环境为例。
开始:首先在环境中,我们有一个起始点,定义为Xinit, 然后我们在环境中随机撒一个点,得到点x_rand,如果x_rand不在障碍物区域,则连接起x_init和x_rand, 我们得到一条连线L,如果L整个不在障碍物里面,则沿着L,从x_init向x_rand的方向移动一定的距离,得到一个新的点,x_new,则x_init,x_new和他们之间的线段构成了一颗最简单的树.
树的扩展: 在开始的基础上,继续重复,在环境中撒点,得到无障碍物区域的点x_rand,然后在已经存在的树上找一个离x_rand最近的点x_near,连接两个点,如果这条线没有障碍物,则沿着这条线,从x_near到x_rand移动一定的距离,得到新的点,x_new, 该点被添加到已经存在的树上
规划: 重复上述过程,直到目标点(或其附近的点)被添加到树上,这时我们就可以在树上找到一条从起点到目标点的路径
三、代码资料
2018-10-29,可采用
https://github.com/zychaoqun/Implementation-of-nonholonomicRRT.git
代码进行简要基于非完整约束的机器人RRT算法测试。
这篇关于路径规划-快速搜索随机树(Rapid-exploration Random Tree)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




