本文主要是介绍SHI-TOMASI角点检测-opencv goodFeaturesToTrack函数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
知道了什么是Harris角点检测,后来有大佬在论文《Good_Features_to_Track》中提出了它的改进版——Shi-Tomasi角点检测,Shi-Tomasi方法在很多情况下可以得到比Harris算法更好的结果。
Harris角点检测中每个窗口的分数公式是将矩阵M的行列式与M的迹相减:
![]()
由于Harris角点检测算法的稳定性和k值有关,而k是个经验值,不好设定最佳值。
Shi-Tomasi发现,角点的稳定性其实和矩阵M的较小特征值有关,于是直接用较小的那个特征值作为分数。这样就不用调整k值了。
所以Shi-Tomasi将分数公式改为如下形式:
![]()
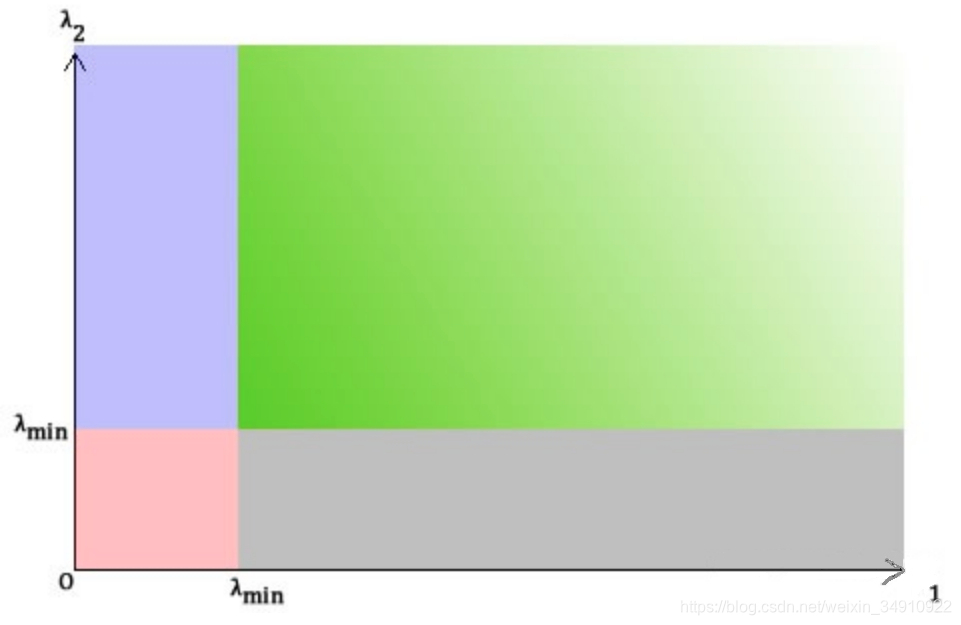
和Harris一样,如果该分数大于设定的阈值,我们就认为它是一个角点。我们可以把它绘制到λ1~λ2空间中,就会得到下图:
OpenCV提供了Shi-Tomasi的函数:cv2.goodFeaturesToTrack(),来获取图像中前N个最好的角点。函数原型如下:
goodFeaturesToTrack(image, maxCorners, qualityLevel, minDistance[, corners[, mask[, blockSize[, useHarrisDetector[, k]]]]])其中的参数如下:
image:输入灰度图像,float32类型;
maxCorners:返回角点的最大数目,值为0表表示没有设置最大值限制,返回所有检测到的角点;
qualityLevel:质量系数(小于1.0的正数,一般在0.01-0.1之间),表示可接受角点的最低质量水 平。该系数乘以最好的角点分数(也就是上面较小的那个特征值),作为可接受的最小分数;例如,如果最好的角点分数值为1500且质量系数为0.01,那么所有质量分数小于15的角都将被忽略;
minDistance:角之间最小欧式距离,忽略小于此距离的点;
corners:输出角点坐标;
mask:可选的感兴趣区域,指定想要检测角点的区域;
blockSize:默认为3,角点检测的邻域大小(窗口尺寸);
useHarrisDetector:用于指定角点检测的方法,如果是true则使用Harris角点检测,false则使用Shi Tomasi算法。默认为False;
k:默认为0.04,Harris角点检测时使用。
设定好这些参数,函数就能在图像上找到角点。所有低于质量水平的角点都会被忽略,然后再把合格角点按角点质量进行降序排列。
然后保留质量最高的一个角点,将它附近(最小距离之内)的角点都删掉(类似于非极大值抑制),按这样的方式最后得到 N 个最佳角点。
python代码测试:
import cv2
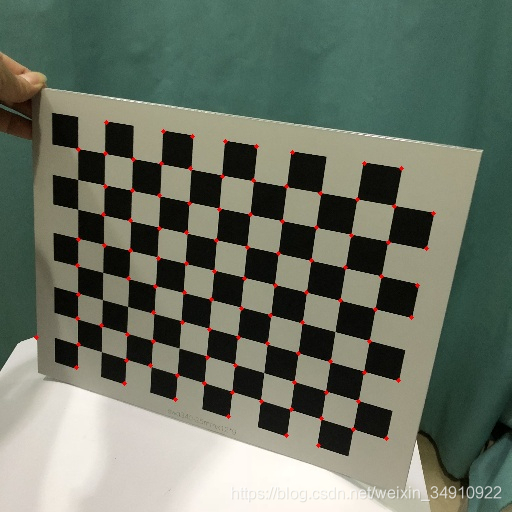
import numpy as npdef test():max_corners = 100quality_level = 0.01min_distance = 10img = cv2.imread('test.jpg')img = cv2.resize(img, (512, 512))gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)corners = cv2.goodFeaturesToTrack(gray, max_corners, quality_level, min_distance)corners = np.int0(corners)for i in corners:x, y = i.ravel()cv2.circle(img, (x, y), 2, (0, 0, 255), -1)cv2.imwrite('out3.jpg', img)结果:
Harris和Shi-Tomasi都是基于梯度计算的角点检测方法,Shi-Tomasi的效果要好一些。基于梯度的检测方法有一些缺点: 计算复杂度高,图像中的噪声可以阻碍梯度计算。
想要提高检测速度的话,可以考虑基于模板的方法:FAST角点检测算法。该算法原理比较简单,但实时性很强。
相关链接:
1、harris角点检测算法实现
2、harris角点检测算法实现
1、扩展阅读-OpenCV——角点检测原理分析(Harris,Shi-Tomasi、亚像素级角点检测)
https://blog.csdn.net/zhu_hongji/article/details/81235643
这篇关于SHI-TOMASI角点检测-opencv goodFeaturesToTrack函数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





