本文主要是介绍基于stm32的寻迹,跟随,避障小车,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
这一篇博客在原理与硬件上和51的相同,但是与51相比,这里增加了转向的差速度。51只有两个定时器,分别给了舵机还有超声波传感器。32这里不受定时器的限制,,因此可以使用额外得定时器制造PWM波形成差速度,在拐弯的时候更加丝滑。硬件的简绍以及语音模块的配置可以参考我51的博客,http://t.csdnimg.cn/4mqbm,我就不细说这些了。我会给出接口的引脚,全部需要手写的程序,以及我遇到的问题,还有部分的讲解。
一、接口介绍
寻迹模块
左DO接PB3,右DO接PB4
跟随模块
左out接PA8,右out接PA9
超声波模块
Trig接PA10,Echo接PA11
舵机模块
橙黄色信号线接PB9
oled显示模块
SDA接PB7,SCL接PB6
2路L9110s模块
左轮:A-1A接PA7,A-1B接PA6
右轮:B-1A接PB1,B-1B接PB0
SU-03T语音模块
A25接PB13
A26接PB14
A27接PB15,电压一定要接5v,否则带不动
至于其余传感器的电压,我就不一个一个的说了,大家使用的时候自己看看传感器的手册,同时也可以结合面包板的性质来供电。下图是使用GPIO的配置

二、stm32cube及语音模块的配置
SYS,RCC照旧
TIM2要作为制作毫秒的定时器用,配置如下。PSC为71,ARR为65535,开启自动重装,对于72MHz的定时器2来说,这样的配置刚好定时1秒。

TIM3的通道1,2,3,4分别作为左轮和右轮的驱动通道,配置如下,PSC为71,ARR为20,开启自动重装;四个通道的配置一样。

TIM4的通道4配置如下
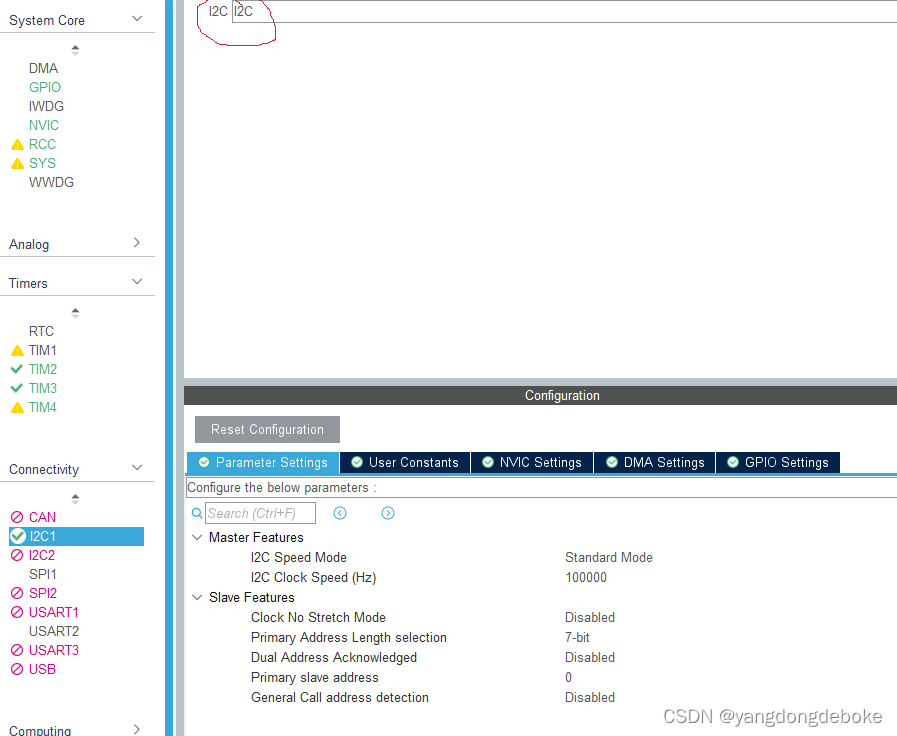
 I2C1的配置如下
I2C1的配置如下
SU-03T语音模块的配置
具体的步骤我就不写了,在51里写的和清楚,可以去看一看,我就给出重要的东西,细枝末节的可以回看51的博客,这是配置SU-03T语音模块的平台http://www.smartpi.cn/#/YzsM


三、代码部分
main.c
#include "sg90.h"
#include "sr04.h"
#include "motor.h"
#include "oled.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
#define MIDDLE 0
#define LEFT 1
#define RIGHT 2#define BZ 1
#define XJ 2
#define GS 3#define LeftWheel_Value_XJ HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_3)
#define RightWheel_Value_XJ HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4)#define LeftWheel_Value_GS HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_8)
#define RightWheel_Value_GS HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_9)#define A25 HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_13)
#define A26 HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14)
#define A27 HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_15)
/* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
char dir;void xunjiMode()
{if(LeftWheel_Value_XJ == GPIO_PIN_RESET && RightWheel_Value_XJ == GPIO_PIN_RESET)goForward();if(LeftWheel_Value_XJ == GPIO_PIN_SET && RightWheel_Value_XJ == GPIO_PIN_RESET)goLeft();if(LeftWheel_Value_XJ == GPIO_PIN_RESET && RightWheel_Value_XJ == GPIO_PIN_SET)goRight();if(LeftWheel_Value_XJ == GPIO_PIN_SET && RightWheel_Value_XJ == GPIO_PIN_SET)stop();
}void gensuiMode()
{if(LeftWheel_Value_GS == GPIO_PIN_RESET && RightWheel_Value_GS == GPIO_PIN_RESET)goForward();if(LeftWheel_Value_GS == GPIO_PIN_SET && RightWheel_Value_GS == GPIO_PIN_RESET)goRight();if(LeftWheel_Value_GS == GPIO_PIN_RESET && RightWheel_Value_GS == GPIO_PIN_SET)goLeft();if(LeftWheel_Value_GS == GPIO_PIN_SET && RightWheel_Value_GS == GPIO_PIN_SET)stop();
}void bizhangMode()
{double disMiddle;double disLeft;double disRight;if(dir != MIDDLE){sgMiddle();dir = MIDDLE;HAL_Delay(300);}disMiddle = get_distance();if(disMiddle > 35){//前进goForward();}else if(disMiddle < 10){goBack();}else{//停止stop();//测左边距离sgLeft();HAL_Delay(300);disLeft = get_distance();sgMiddle();HAL_Delay(300);sgRight();dir = RIGHT;HAL_Delay(300);disRight = get_distance();if(disLeft < disRight){goRight();HAL_Delay(150);stop();}if(disRight < disLeft){goLeft();HAL_Delay(150);stop();}}HAL_Delay(50);
}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */int mark = 0;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM4_Init();MX_TIM2_Init();MX_I2C1_Init();MX_TIM3_Init();/* USER CODE BEGIN 2 */HAL_NVIC_SetPriority(SysTick_IRQn,0,0);initSG90();HAL_Delay(1000);dir = MIDDLE;Oled_Init();Oled_Screen_Clear();Oled_Show_Str(2,2,"-----Ready----");/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///满足寻迹模式的条件if(A25 == 0 && A26 == 1 && A27 == 1){if(mark != XJ){Oled_Screen_Clear();Oled_Show_Str(2,2,"-----XunJi----");}mark = XJ;xunjiMode();}//满足跟随模式的条件if(A25 == 1 && A26 == 0 && A27 == 1){if(mark != GS){Oled_Screen_Clear();Oled_Show_Str(2,2,"-----GenSui----");}mark = GS;gensuiMode();}//满足避障模式的条件if(A25 == 1 && A26 == 1 && A27 == 0){if(mark != BZ){Oled_Screen_Clear();Oled_Show_Str(2,2,"-----BiZhang----");}mark = BZ;bizhangMode();}}HAL_Delay(50);/* USER CODE END 3 */
}sg90.c
#include "sg90.h"
#include "gpio.h"
#include "tim.h"void initSG90(void)
{HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4); //启动定时器4__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 17); //将舵机置为90度
}void sgMiddle(void)
{__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 17); //将舵机置为90度
}void sgRight(void)
{__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 12); //将舵机置为45度
}void sgLeft(void)
{__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 20); //将舵机置为135度
}
sr04.c
#include "sr04.h"
#include "gpio.h"
#include "tim.h"void TIM2_Delay_us(uint16_t n_us)
{/* 使能定时器2计数 */__HAL_TIM_ENABLE(&htim2);__HAL_TIM_SetCounter(&htim2, 0);while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );/* 关闭定时器2计数 */__HAL_TIM_DISABLE(&htim2);
}double get_distance(void)
{int cnt=0;//1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_SET);//拉高TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_RESET);//拉低//2. echo由低电平跳转到高电平,表示开始发送波//波发出去的那一下,开始启动定时器while(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_11) == GPIO_PIN_RESET);//等待输入电平拉高HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);//3. 由高电平跳转回低电平,表示波回来了while(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_11) == GPIO_PIN_SET);//等待输入电平变低//波回来的那一下,我们开始停止定时器HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间cnt = __HAL_TIM_GetCounter(&htim2);//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)return (cnt*340/2*0.000001*100); //单位:cm
}
motor.c
#include "motor.h"
#include "gpio.h"
#include "tim.h"void PWM_Start(void)
{HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_3);HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_4);
}void goForward(void)
{
PWM_Start();// 左轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, 20);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1,1);// 右轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_3, 20);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_4, 1);
}void goBack(void)
{PWM_Start();// 左轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, 1);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, 20);// 右轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_3, 1);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_4, 20);
}void goLeft(void)
{PWM_Start();// 左轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, 19);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, 6);// 右轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_3, 19);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_4, 1);
}void goRight(void)
{PWM_Start();// 左轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, 19);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, 1);// 右轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_3, 19);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_4, 6);
}void stop(void)
{PWM_Start();// 左轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, 0);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, 0);// 右轮__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_3, 0);__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_4, 0);
}
oled.c
#include "oled.h"
#include "i2c.h"
#include "oledfont.h"void Oled_Write_Cmd(uint8_t dataCmd)
{HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x00, I2C_MEMADD_SIZE_8BIT,&dataCmd, 1, 0xff);
}void Oled_Write_Data(uint8_t dataData)
{HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x40, I2C_MEMADD_SIZE_8BIT,&dataData, 1, 0xff);
}void Oled_Init(void){Oled_Write_Cmd(0xAE);//--display offOled_Write_Cmd(0x00);//---set low column addressOled_Write_Cmd(0x10);//---set high column addressOled_Write_Cmd(0x40);//--set start line address Oled_Write_Cmd(0xB0);//--set page addressOled_Write_Cmd(0x81); // contract controlOled_Write_Cmd(0xFF);//--128 Oled_Write_Cmd(0xA1);//set segment remap Oled_Write_Cmd(0xA6);//--normal / reverseOled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64)Oled_Write_Cmd(0x3F);//--1/32 dutyOled_Write_Cmd(0xC8);//Com scan directionOled_Write_Cmd(0xD3);//-set display offsetOled_Write_Cmd(0x00);//Oled_Write_Cmd(0xD5);//set osc divisionOled_Write_Cmd(0x80);//Oled_Write_Cmd(0xD8);//set area color mode offOled_Write_Cmd(0x05);//Oled_Write_Cmd(0xD9);//Set Pre-Charge PeriodOled_Write_Cmd(0xF1);//Oled_Write_Cmd(0xDA);//set com pin configuartionOled_Write_Cmd(0x12);//Oled_Write_Cmd(0xDB);//set VcomhOled_Write_Cmd(0x30);//Oled_Write_Cmd(0x8D);//set charge pump enableOled_Write_Cmd(0x14);//Oled_Write_Cmd(0xAF);//--turn on oled panel
}void Oled_Screen_Clear(void){char i,n;Oled_Write_Cmd (0x20); //set memory addressing modeOled_Write_Cmd (0x02); //page addressing modefor(i=0;i<8;i++){Oled_Write_Cmd(0xb0+i); Oled_Write_Cmd(0x00); Oled_Write_Cmd(0x10); for(n=0;n<128;n++)Oled_Write_Data(0x00); }
}void Oled_Show_Char(char row,char col,char oledChar){ //row*2-2unsigned int i;Oled_Write_Cmd(0xb0+(row*2-2)); //page 0Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //high for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}Oled_Write_Cmd(0xb0+(row*2-1)); //page 1Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //highfor(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}
}/******************************************************************************/
// 函数名称:Oled_Show_Str
/******************************************************************************/
void Oled_Show_Str(char row,char col,char *str){while(*str!=0){Oled_Show_Char(row,col,*str);str++;col += 8; }
}sg90.h
#ifndef __SG90_H__
#define __SG90_H__void initSG90(void);
void sgMiddle(void);
void sgRight(void);
void sgLeft(void);#endif
sr04.h
#ifndef __SR04_H__
#define __SR04_H__
void TIM2_Delay_us(uint16_t n_us);
double get_distance(void);#endif
motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__
void PWM_Start(void);
void goForward(void);
void goBack(void);
void goLeft(void);
void goRight(void);
void stop(void);#endif
oled.h
#ifndef __OLED_H__
#define __OLED_H__void Oled_Init(void);
void Oled_Screen_Clear(void);
void Oled_Show_Char(char row,char col,char oledChar);
void Oled_Show_Str(char row,char col,char *str);#endifoledfont.h
const unsigned char F8X16[]=
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 00x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 10x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 20x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 30x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 40xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 50x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 60x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 70x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 80x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 90x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 100x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 110x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 120x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 130x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 140x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 150x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 160x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 170x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 180x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 190x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 200x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 210x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 220x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 230x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 240x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 250x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 260x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 270x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 280x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 290x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 300x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 310xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 320x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 330x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 340xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 350x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 360x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 370x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 380xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 390x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 400x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 410x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 420x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 430x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 440x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 450x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 460xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 470x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 480xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 490x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 500x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 510x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 520x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 530x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 540xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 550x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 560x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 570x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 580x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 590x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 600x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 610x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 620x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 630x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 640x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 650x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 660x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 670x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 680x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 690x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 700x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 710x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 720x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 730x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 740x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 750x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 760x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 770x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 780x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 790x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 800x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 810x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 820x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 830x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 840x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 850x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 860x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 870x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 880x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 890x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 900x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 910x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 920x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 930x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};四、其它
1.在main.c里,main函数里面在while循环之前,把滴答定时器优先级提前,写上HAL_NVIC_SetPriority(SysTick_IRQn,0,0);在while循环的末尾加上延时函数HAL_Delay(50);否则程序极度容易死机。
2.在motor.c里,第一,想要开启pwm波,一定要记得调用HAL_TIM_PWM_Start函数,否则无法开启。第二,使用 __HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_4,1)的时候,我们在STM32Cube中选择的模式一,ARR的比较位上限是你设置的ARR最高位,下限一定不是0,最少你要写成1,函数里我已经用红色标记出来了;如果你要写0,还是会死机。第三你设置速度差的时候,同一个轮子的 __HAL_TIM_SetCompare函数的最后一位的差值稍微大一点,不然没有足够的电压差,带不动电机,这个需要自己调试。
3.在sr04.c里,我们需要自己设计微秒函数,因为HAL里有毫秒函数,没有微秒函数,所以我就把定时器2改成定时1毫秒
void TIM2_Delay_us(uint16_t n_us)
{
/* 使能定时器2计数 */
__HAL_TIM_ENABLE(&htim2);
__HAL_TIM_SetCounter(&htim2, 0);
while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );
/* 关闭定时器2计数 */
__HAL_TIM_DISABLE(&htim2);
}
这里面uint16_t n_us是多少,就延时多少毫秒,使用定时器之前,一定先使能
4.请注意,虽然TIM2也有PWM通道,但是我没有使用,因为在定时器里面,你把PSC和ARR的值固定了,在这个定时器里的功能都要使用一样的PSC和ARR。PWM波也可以使用和定时器一样的PSC,ARR,但是我不想混在一起,所以我就用定时器3做了PWM波的通道,并重新配置了PSC和ARR的值。
这篇关于基于stm32的寻迹,跟随,避障小车的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








