本文主要是介绍[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-9阈值选取-机器视觉中应用正态分布和6-sigma,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-数学基础Ch0-9阈值选取-机器视觉中应用正态分布和6-sigma
5M1E——造成产品质量波动的六因素
人 Man Manpower
机器 Machine
材料 Material
方法 Method
测量 Measurment
环境 Envrionment
DMAIC —— 6σ管理中的流程改善
定义 Define
测量 Measure
分析 Analyse
改善 Improve
控制 Control
随机变量与正态分布 Normal Distribution
X = ( μ , σ 2 ) X=\left( \mu ,\sigma ^2 \right) X=(μ,σ2)
μ \mu μ : 期望(平均值), σ 2 \sigma ^2 σ2:方差

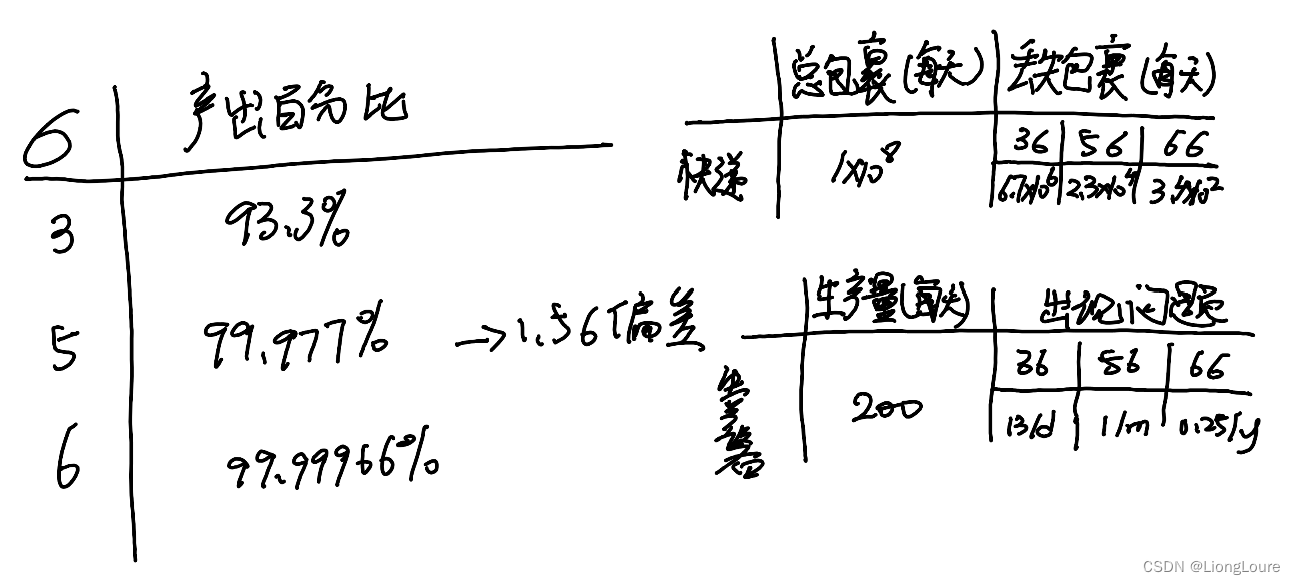
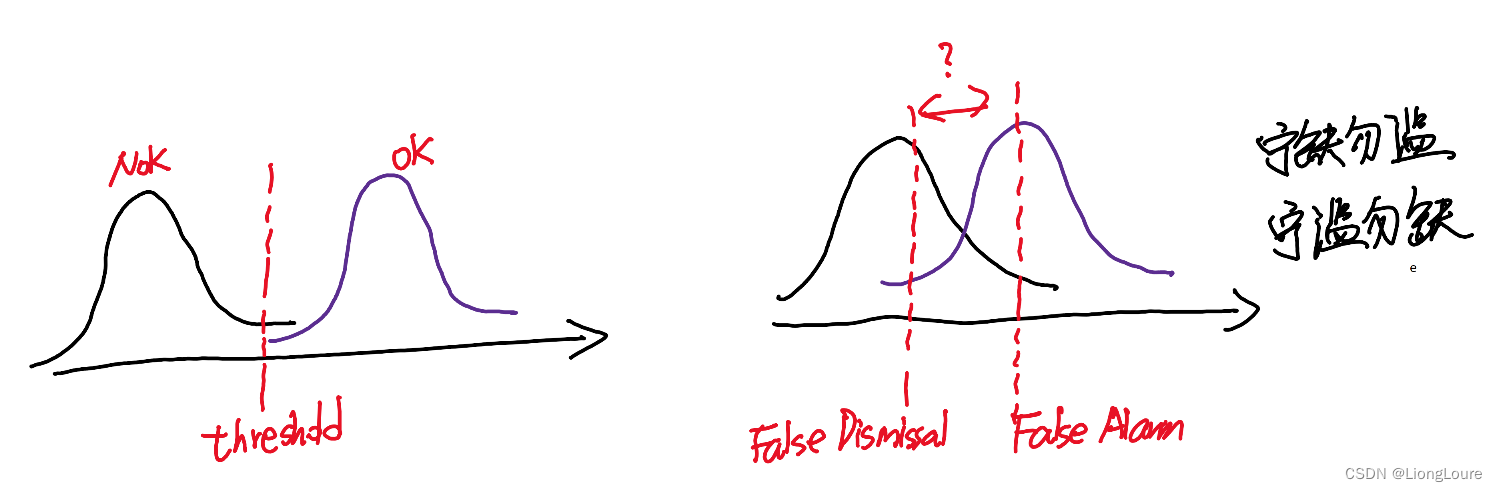
6σ与实际应用
这篇关于[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-9阈值选取-机器视觉中应用正态分布和6-sigma的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




