本文主要是介绍【数学建模】清风视频笔记2、TOPSIS法(优劣解距离法),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
TOPSIS法(优劣解距离法)
例子
小明和同学第一学期高数成绩
| 姓名 | 成绩 | 排名 | 修正后的排名 | 评分 |
|---|---|---|---|---|
| 小明 | 89 | 2 | 3 | 3/10=0.3 |
| 小王 | 4 | 1 | 1/10=0.1 | |
| 小张 | 74 | 3 | 2 | 2/10=0.2 |
| 清风 | 1 | 4 | 4/10=0.4 |
只要排名不变评分就不会变
最高成绩max:99
最低成绩min:60
| 姓名 | 成绩 | 未归一化的评分 | 归一化评分 |
|---|---|---|---|
| 小明 | 89 | (89-60)/(99-60)=0.74 | 0.74/2.1=0.35 |
| 小王 | 60 | (60-60)/(99-60)=0 | 0/2.1=0 |
| 小张 | 74 | (74-60)/(99-60)=0.36 | 0.36/2.1=0.17 |
| 清风 | 99 | (99-60)/(99-60)=1 | 1/2.1=0.48 |
x − m i n m a x − m i n \frac{x-min}{max-min} max−minx−min
原因:
1、比较对象一般远大于两个
2、比较的指标往往不只是一方面的
3、很多指标不存在理论上的最大值和最小值
| 姓名 | 成绩 | 争吵次数 |
|---|---|---|
| 小明 | 89 | 2 |
| 小王 | 60 | 0 |
| 小张 | 74 | 1 |
| 清风 | 99 | 3 |
成绩是越高越好,这样的指标称为极大型指标(效益型指标)
争吵是越少越好,这样的指标称为极小型指标(成本型指标)
**指标正向化:**把所有的指标转化为极大型。 m a x − x max-x max−x
为了消去不同指标量纲的影响,需要对已经正向化的矩阵进行标准化处理
z i j = x i j ∑ i = 1 n x i j 2 z_{ij}=\frac{x_{ij}}{\sqrt{\sum_{i=1}^{n}x_{ij}^2}} zij=∑i=1nxij2xij
当只有一个指标的时候可看作:
x 与 最 小 值 的 距 离 x 与 最 大 值 的 距 离 + x 与 最 小 值 的 距 离 \frac{x与最小值的距离}{x与最大值的距离+x与最小值的距离} x与最大值的距离+x与最小值的距离x与最小值的距离
如何计算得分
| 姓名 | 正向化后的成绩 | 正向化后的争吵次数 |
|---|---|---|
| 小明 | 0.5437 | 0.2673 |
| 小王 | 0.3665 | 0.8018 |
| 小张 | 0.4520 | 0.5345 |
| 清风 | 0.6048 | 0 |
最 大 值 : [ 0.6048 , 0.8018 ] , 最 小 值 : [ 0.3665 , 0 ] 最大值:[0.6048,0.8018],最小值:[0.3665,0] 最大值:[0.6048,0.8018],最小值:[0.3665,0]
D 小 明 + = ( 6048 − 0.5437 ) 2 + ( 0.8018 − 0.2673 ) 2 = 0.5380 D_{小明}^+=\sqrt{(6048-0.5437)^2+(0.8018-0.2673)^2}=0.5380 D小明+=(6048−0.5437)2+(0.8018−0.2673)2=0.5380
D 小 明 − = ( 0.3665 − 0.5437 ) 2 + ( 0 − 0.2673 ) 2 = 0.3206 D_{小明}^-=\sqrt{(0.3665-0.5437)^2+(0-0.2673)^2}=0.3206 D小明−=(0.3665−0.5437)2+(0−0.2673)2=0.3206
D 小 王 + = ( 0.6048 − 0.3665 ) 2 + ( 0.8018 − 0.8018 ) 2 = 0.2382 D_{小王}^+=\sqrt{(0.6048-0.3665)^2+(0.8018-0.8018)^2}=0.2382 D小王+=(0.6048−0.3665)2+(0.8018−0.8018)2=0.2382
D 小 王 − = ( 0.3665 − 0.3665 ) 2 + ( 0.8018 − 0 ) 2 = 0.8018 D_{小王}^-=\sqrt{(0.3665-0.3665)^2+(0.8018-0)^2}=0.8018 D小王−=(0.3665−0.3665)2+(0.8018−0)2=0.8018
总结
步骤:
1、将所有数据极大化
- 极小型: m a x − x max-x max−x
- 中间型: M = m a x { ∣ x i − x b e s t ∣ } , x i ‘ = 1 − ∣ x i − x b e s t ∣ M M=max\left\{|x_i-x_{best}|\right\},x_i^`=1-\frac{|x_{i}-x_{best}|}{M} M=max{∣xi−xbest∣},xi‘=1−M∣xi−xbest∣
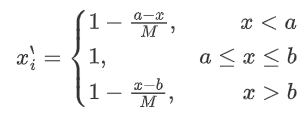
- 区间型: M = m a x { a − m i n { x i } , m a x { x i } − b } M=max\left\{a-min\left\{x_i\right\},max\left\{x_i\right\}-b\right\} M=max{a−min{xi},max{xi}−b}
2、正向化矩阵标准化
3、计算得分并归一化
这篇关于【数学建模】清风视频笔记2、TOPSIS法(优劣解距离法)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






