本文主要是介绍双自由度振动系统/车辆悬架的受力分析及建模——以1/4车辆悬架为例,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
引入
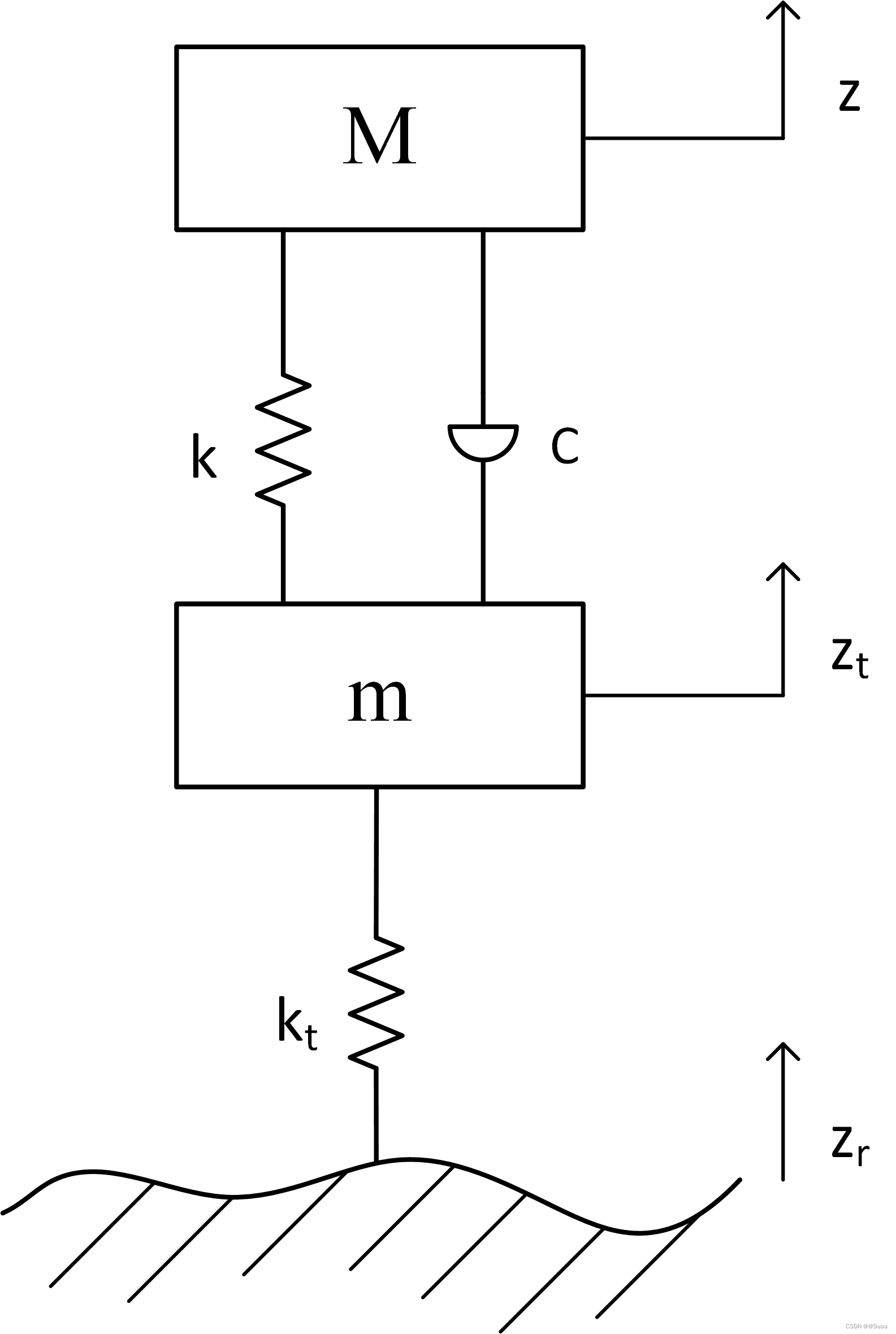
在做悬架垂向运动控制或动态力学计算时,双质量振动系统微分方程是所有工作的基础,常见如下形式:(注意分别是簧上质量、簧下质量、路面的垂向位移变化)
这里给出两种动力学方程:
(1)
(2)
仔细观察,这两个方程组是完全一样的。在研读论文时,可能会发现一个令人懊恼的问题:不同的论文有不同的写法,在我们试着读懂这些论文时,浪费了大量的时间在推导这一个小小的公式上,其实只是不同作者的思路不同罢了。在双自由度振动系统问题上,大致分为两类,而最后得出的动力学方程也不外乎以上“两种”形式。
下面分别给出这两种形式的推导过程。
(1)正常思维
首先假设 zr > zt > z , 也就是假设 路面位移 > 簧下质量位移 > 簧上质量位移 。(其实这个假设没有必要,因为这是事实。因为路面振动引起了簧下质量振动,又因为簧下质量振动引起了簧上质量振动,振动系统的目的就是要减震,上边的位移比下边小也很好理解。)
基于此,我们可以进行受力分析,然后利用牛顿定律得出方程。
受力分析:
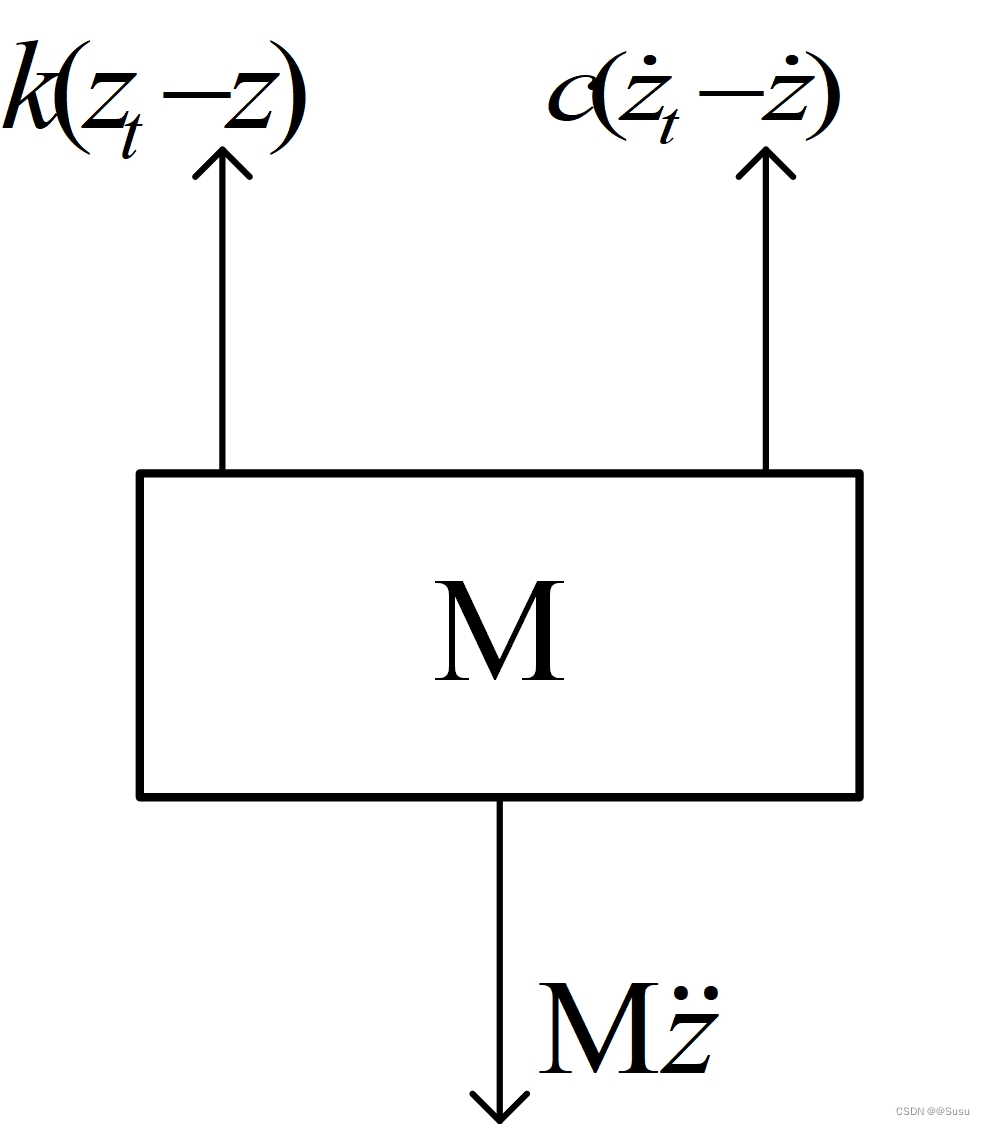
其中,惯性力和
的方向非常重要,记住:惯性力方向与加速度方向相反。
对于M,因为簧下质量位移 > 簧上质量位移,弹簧和阻尼都被压缩,所以k弹簧和阻尼力都向上;又因为在这种假设情况下,是簧下质量位移引起的簧上质量位移,故M具有向上运动趋势,惯性力向下。
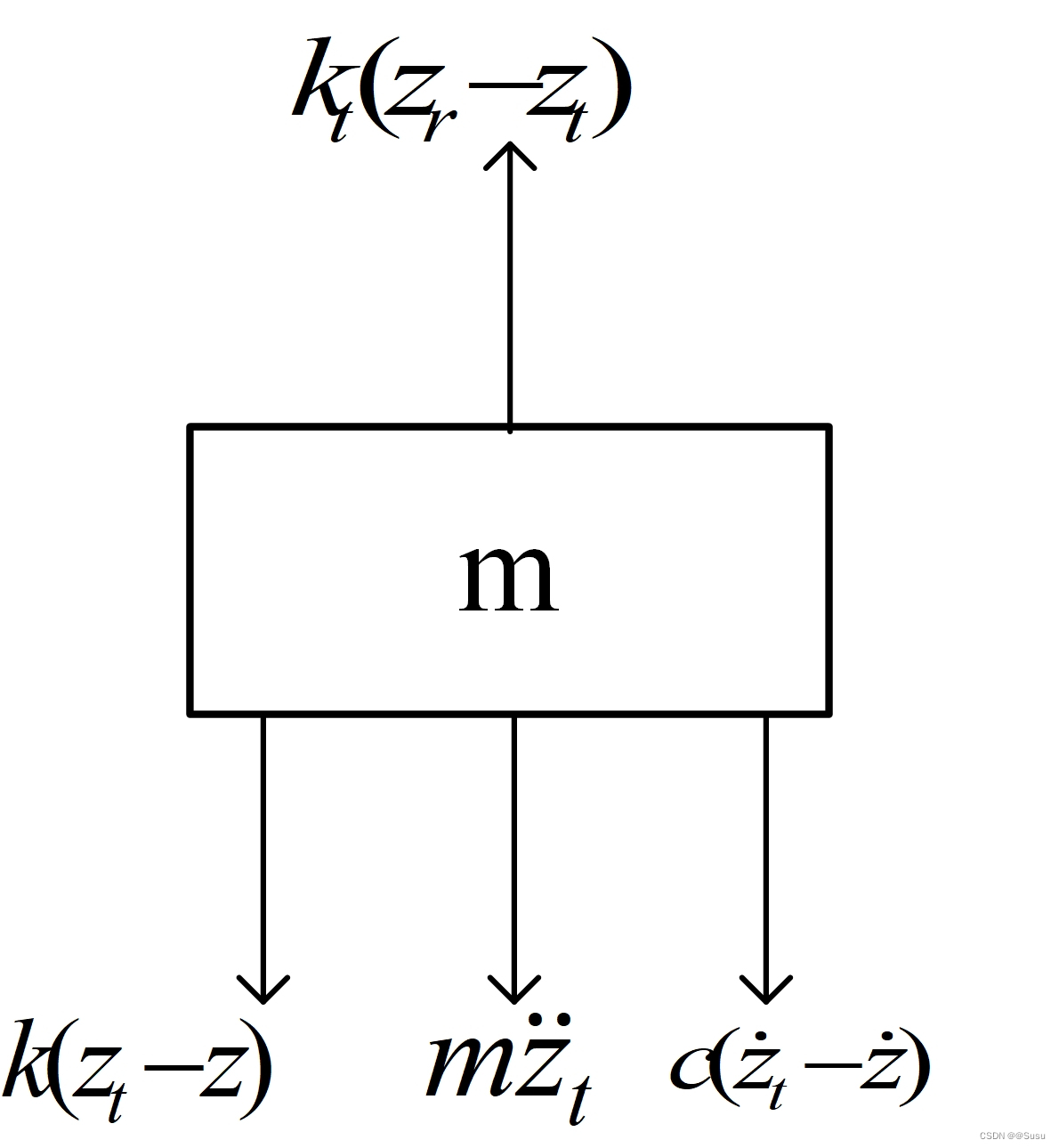
对于m,因为路面位移 > 簧下质量位移 > 簧上质量位移, 所以弹簧力向上, k弹簧和阻尼力方向与M所受这两个力方向相反,所以向下;又因为在这种假设情况下,是路面位移引起的簧下质量位移,故m有向上加速趋势,所以这里加速度方向向上,惯性力
方向向下。
根据受力分析结果以及牛顿定律不难得出(1)式。
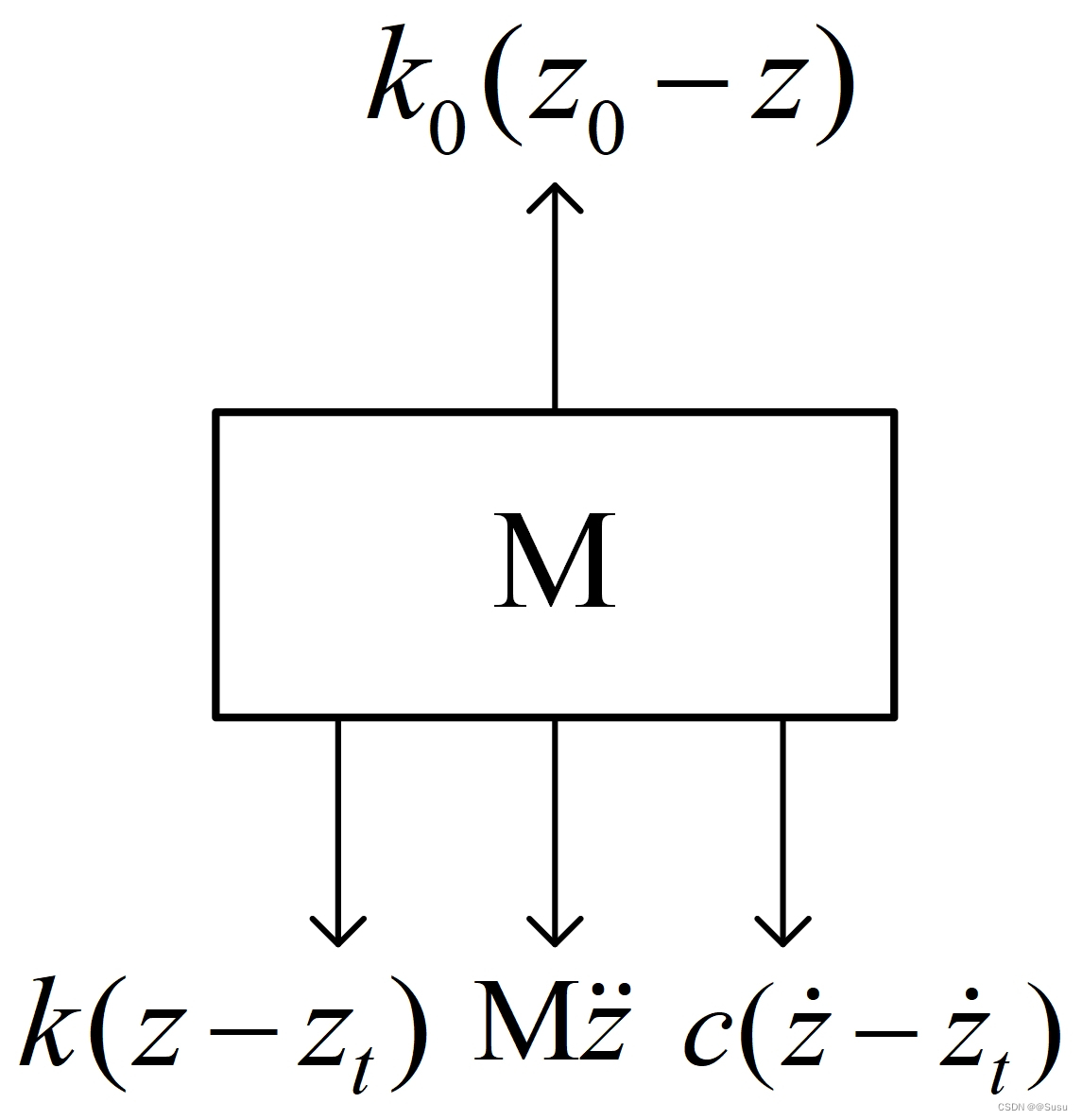
(2)逆向思维
不同的人考虑问题从不同角度出发,对于(2)式的推导,可以这样理解:
假设M之上存在一个 弹簧 或者 阻尼
(无关紧要)连接着M与天空,这同样是著名的天钩控制(sky-hook)理论的理想状态。模型如下:
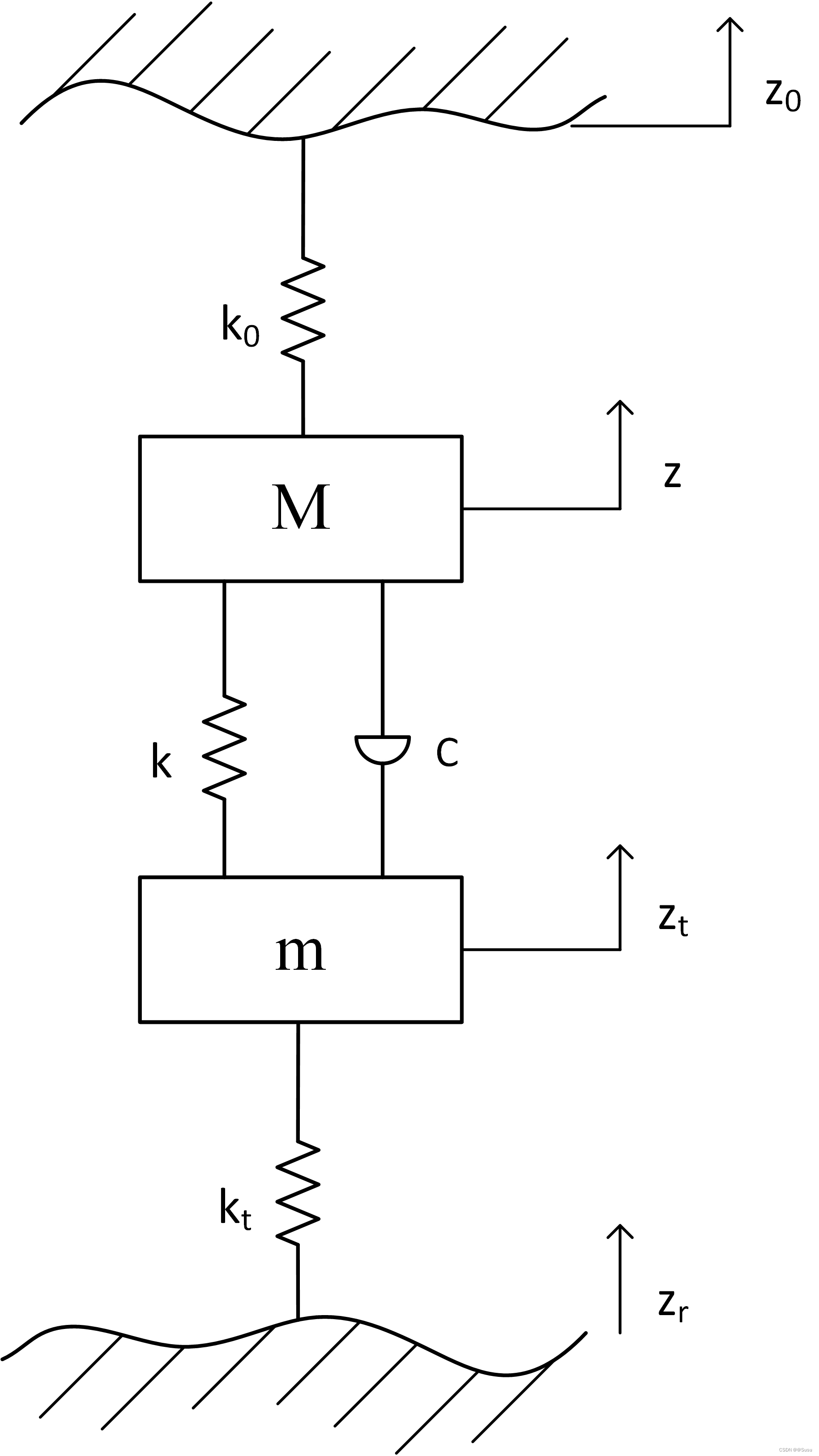
这里我们假设天空也存在一个位移 ,并且假设 天空位移 > 簧上质量位移 > 簧下质量位移 > 路面位移。基于此,
受力分析:

相信通过对(1)式的理解学习,第(2)种情况的受力分析就不难理解了。
对于M,因为 簧上质量位移 > 簧下质量位移,弹簧 k 和阻尼都被拉伸,所以k弹簧和阻尼力都向下,弹簧 被拉伸,
弹簧力向上;又因为这种假设情况下,是簧上质量位移引起的簧下质量位移,故M具有向上运动趋势,惯性力
向下。
对于m,因为簧上质量位移 > 簧下质量位移 > 路面位移, 弹簧被拉伸,所以
弹簧力向下,k弹簧和阻尼力方向与 M所受这两个力 方向相反,所以向上;又因为在这种假设情况下,是簧下质量位移引起的路面位移,故m有向上加速趋势,所以这里加速度方向向上,惯性力
方向向下。
可以得到以下方程:
(3)
这里多了 ,因为实际上不存在这样一个弹簧连接天空和M,所以可以令
=0,消去这一项,从而得到(2)式。
可以发现,两种情况下,M和m的惯性力方向都是向下的,因为无论是收到推力还是拉力,合力方向向上,加速度方向向上,惯性力方向也就向下了。
无论是 认为 地面位移引起振动 还是 认为M位移引起振动,最后得到的微分方程是一样的,或许放这样两张图更容易理解:


 总之,不论在哪种情况下,最后得出的方程肯定是一样的,码字不易,你懂的。
总之,不论在哪种情况下,最后得出的方程肯定是一样的,码字不易,你懂的。
这篇关于双自由度振动系统/车辆悬架的受力分析及建模——以1/4车辆悬架为例的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







