本文主要是介绍手势识别4:C/C++实现手部检测和手势识别(含源码下载),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
手势识别4:C/C++实现手部检测和手势识别(含源码下载)
目录
手势识别4:C/C++实现手部检测和手势识别(含源码下载)
1. 前言
2. 手势识别模型(YOLOv5)
(1)手势识别模型训练
(2)将Pytorch模型转换ONNX模型
(3)将ONNX模型转换为TNN模型
3. 手势识别模型C++部署
(1)项目结构
(2)配置开发环境(OpenCV+OpenCL+base-utils+TNN)
(3)部署TNN模型
(4)CMake配置
(5)main源码
(6)源码编译和运行
4. 手势识别检测效果
5. 项目源码下载
6. 手势识别Android版本
7.项目推荐:手部关键点检测
1. 前言
这是手势识别项目系列之《C/C++实现手部检测和手势识别》;本篇主要分享将Python训练后的YOLOv5的手势识别模型转写成C/C++代码。我们将开发一个简易的、可实时运行的手势识别C/C++ Demo,支持one,two,ok等18种常见的通用手势动作识别,也可以根据业务需求自定义训练的手势识别的类别。C/C ++版本手势识别模型推理支持CPU和GPU加速,在GPU(OpenCL)加速下,可以达到实时的检测效果,基本满足业务的性能需求。

先展示一下手势识别检测的效果:
|
|  |
【尊重原创,转载请注明出处】https://blog.csdn.net/guyuealian/article/details/134690422
更多手势识别,手部关键点检测的系列文章请参考:
- 手势识别1:HaGRID手势识别数据集使用说明和下载
- 手势识别2:基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)
- 手势识别3:Android实现手部检测和手势识别(可实时运行,含Android源码)
- 手势识别4:C/C++实现手部检测和手势识别(含源码下载)
- 手部关键点检测1:手部关键点(手部姿势估计)数据集(含下载链接)
- 手部关键点检测2:YOLOv5实现手部检测(含训练代码和数据集)
- 手部关键点检测3:Pytorch实现手部关键点检测(手部姿势估计)含训练代码和数据集
- 手部关键点检测4:Android实现手部关键点检测(手部姿势估计)含源码 可实时检测
- 手部关键点检测5:C++实现手部关键点检测(手部姿势估计)含源码 可实时检测

2. 手势识别模型(YOLOv5)
(1)手势识别模型训练
考虑到手机端CPU/GPU性能比较弱鸡,直接部署yolov5s运行速度十分慢,所以这里Android部署仅仅考虑yolov5s05模型,yolov5s05即是在yolov5s的基础上做了模型轻量化处理,其channels通道数全部都减少一半,并且模型输入由原来的640×640降低到320×320。从性能来看,yolov5s05比yolov5s快5多倍,而mAP下降了5%(0.87605→0.82706),对于手机端,这精度还是可以接受。
官方YOLOv5: GitHub - ultralytics/yolov5: YOLOv5 🚀 in PyTorch > ONNX > CoreML > TFLite
下面是yolov5s05和yolov5s的参数量和计算量对比:
| 模型 | input-size | params(M) | GFLOPs | 手势识别mAP(0.5:0.95) |
| yolov5s | 640×640 | 7.2 | 16.5 | 0.87605 |
| yolov5s05 | 320×320 | 1.7 | 1.1 | 0.82706 |
yolov5s05和yolov5s训练过程完全一直,仅仅是配置文件不一样而已;碍于篇幅,本篇博客不在赘述,详细训练过程请参考:《基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)》
(2)将Pytorch模型转换ONNX模型
训练好yolov5s模型后,你需要先将Pytorch模型转换为ONNX模型,并使用onnx-simplifier简化网络结构,Python版本的已经提供了ONNX转换脚本,终端输入命令如下:
# 转换yolov5s05模型
python export.py --weights "data/model/yolov5s05_320/weights/best.pt" --img-size 320 320# 转换yolov5s模型
python export.py --weights "data/model/yolov5s_640/weights/best.pt" --img-size 640 640GitHub: https://github.com/daquexian/onnx-simplifier
Install: pip3 install onnx-simplifier
(3)将ONNX模型转换为TNN模型
目前在C++端上,CNN模型有多种部署方式,可以采用TNN,MNN,NCNN,以及TensorRT等部署工具,鄙人采用TNN进行Android端上部署
TNN转换工具:
- (1)将ONNX模型转换为TNN模型,请参考TNN官方说明:TNN/onnx2tnn.md at master · Tencent/TNN · GitHub
- (2)一键转换,懒人必备:一键转换 Caffe, ONNX, TensorFlow 到 NCNN, MNN, Tengine (可能存在版本问题,这个工具转换的TNN模型可能不兼容,建议还是自己build源码进行转换,2022年9约25日测试可用)
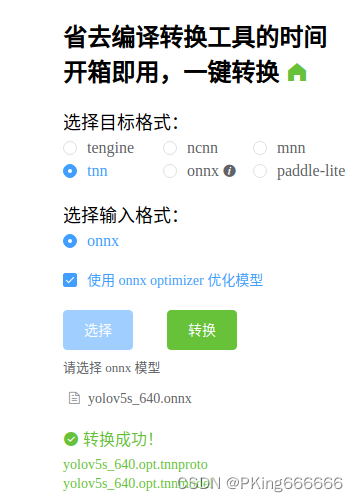
转换成功后,会生成两个文件(*.tnnproto和*.tnnmodel) ,下载下来后面会用到
3. 手势识别模型C++部署
项目IDE开发工具使用CLion,相关依赖库主要有OpenCV,base-utils以及TNN和OpenCL(可选),其中OpenCV必须安装,OpenCL用于模型加速,base-utils以及TNN已经配置好,无需安装;
项目仅在Ubuntu18.04进行测试,Windows系统下请自行配置好开发环境。
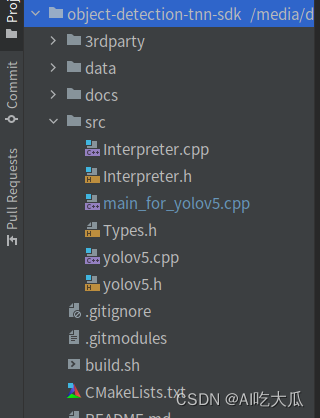
(1)项目结构
(2)配置开发环境(OpenCV+OpenCL+base-utils+TNN)
项目仅在Ubuntu18.04进行测试,Windows系统下请自行配置和编译
- 安装OpenCV:图像处理
图像处理(如读取图片,图像裁剪等)都需要使用OpenCV库进行处理
安装教程:Ubuntu18.04安装opencv和opencv_contrib
OpenCV库使用opencv-4.3.0版本,opencv_contrib库暂时未使用,可不安装
- 安装OpenCL:模型加速
安装教程:Ubuntu16.04 安装OpenCV&OpenCL
OpenCL用于模型GPU加速,若不使用OpenCL进行模型推理加速,纯C++推理模型,速度会特别特别慢
- base-utils:C++库
GitHub:https://github.com/PanJinquan/base-utils (无需安装,项目已经配置了)
base_utils是个人开发常用的C++库,集成了C/C++ OpenCV等常用的算法
- TNN:模型推理
GitHub:https://github.com/Tencent/TNN (无需安装,项目已经配置了)
由腾讯优图实验室开源的高性能、轻量级神经网络推理框架,同时拥有跨平台、高性能、模型压缩、代码裁剪等众多突出优势。TNN框架在原有Rapidnet、ncnn框架的基础上进一步加强了移动端设备的支持以及性能优化,同时借鉴了业界主流开源框架高性能和良好拓展性的特性,拓展了对于后台X86, NV GPU的支持。手机端 TNN已经在手机QQ、微视、P图等众多应用中落地,服务端TNN作为腾讯云AI基础加速框架已为众多业务落地提供加速支持。
(3)部署TNN模型
项目模型推理采用TNN部署框架(支持多线程CPU和GPU加速推理);图像处理采用OpenCV库,模型加速采用OpenCL,在普通电脑设备即可达到实时处理。
如果你想在这个 C++ Demo部署你自己训练的模型,你可以将训练好的Pytorch模型转换ONNX ,再转换成TNN模型,然后把原始的模型替换成你自己的TNN模型即可。
(4)CMake配置
这是CMakeLists.txt,其中主要配置OpenCV+OpenCL+base-utils+TNN这四个库,Windows系统下请自行配置和编译
cmake_minimum_required(VERSION 3.5)
project(Detector)add_compile_options(-fPIC) # fix Bug: can not be used when making a shared object
set(CMAKE_CXX_FLAGS "-Wall -std=c++11 -pthread")
#set(CMAKE_CXX_FLAGS_RELEASE "-O2 -DNDEBUG")
#set(CMAKE_CXX_FLAGS_DEBUG "-g")if (NOT CMAKE_BUILD_TYPE AND NOT CMAKE_CONFIGURATION_TYPES)# -DCMAKE_BUILD_TYPE=Debug# -DCMAKE_BUILD_TYPE=Releasemessage(STATUS "No build type selected, default to Release")set(CMAKE_BUILD_TYPE "Release" CACHE STRING "Build type (default Debug)" FORCE)
endif ()# opencv set
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS} ./src/)
#MESSAGE(STATUS "OpenCV_INCLUDE_DIRS = ${OpenCV_INCLUDE_DIRS}")# base_utils
set(BASE_ROOT 3rdparty/base-utils) # 设置base-utils所在的根目录
add_subdirectory(${BASE_ROOT}/base_utils/ base_build) # 添加子目录到build中
include_directories(${BASE_ROOT}/base_utils/include)
include_directories(${BASE_ROOT}/base_utils/src)
MESSAGE(STATUS "BASE_ROOT = ${BASE_ROOT}")# TNN set
# Creates and names a library, sets it as either STATIC
# or SHARED, and provides the relative paths to its source code.
# You can define multiple libraries, and CMake builds it for you.
# Gradle automatically packages shared libraries with your APK.
# build for platform
# set(TNN_BUILD_SHARED OFF CACHE BOOL "" FORCE)
if (CMAKE_SYSTEM_NAME MATCHES "Android")set(TNN_OPENCL_ENABLE ON CACHE BOOL "" FORCE)set(TNN_ARM_ENABLE ON CACHE BOOL "" FORCE)set(TNN_BUILD_SHARED OFF CACHE BOOL "" FORCE)set(TNN_OPENMP_ENABLE ON CACHE BOOL "" FORCE) # Multi-Thread#set(TNN_HUAWEI_NPU_ENABLE OFF CACHE BOOL "" FORCE)add_definitions(-DTNN_OPENCL_ENABLE) # for OpenCL GPUadd_definitions(-DTNN_ARM_ENABLE) # for Android CPUadd_definitions(-DDEBUG_ANDROID_ON) # for Android Logadd_definitions(-DPLATFORM_ANDROID)
elseif (CMAKE_SYSTEM_NAME MATCHES "Linux")set(TNN_OPENCL_ENABLE ON CACHE BOOL "" FORCE)set(TNN_CPU_ENABLE ON CACHE BOOL "" FORCE)set(TNN_X86_ENABLE OFF CACHE BOOL "" FORCE)set(TNN_QUANTIZATION_ENABLE OFF CACHE BOOL "" FORCE)set(TNN_OPENMP_ENABLE ON CACHE BOOL "" FORCE) # Multi-Threadadd_definitions(-DTNN_OPENCL_ENABLE) # for OpenCL GPUadd_definitions(-DDEBUG_ON) # for WIN/Linux Logadd_definitions(-DDEBUG_LOG_ON) # for WIN/Linux Logadd_definitions(-DDEBUG_IMSHOW_OFF) # for OpenCV showadd_definitions(-DPLATFORM_LINUX)
elseif (CMAKE_SYSTEM_NAME MATCHES "Windows")set(TNN_OPENCL_ENABLE ON CACHE BOOL "" FORCE)set(TNN_CPU_ENABLE ON CACHE BOOL "" FORCE)set(TNN_X86_ENABLE ON CACHE BOOL "" FORCE)set(TNN_QUANTIZATION_ENABLE OFF CACHE BOOL "" FORCE)set(TNN_OPENMP_ENABLE ON CACHE BOOL "" FORCE) # Multi-Threadadd_definitions(-DTNN_OPENCL_ENABLE) # for OpenCL GPUadd_definitions(-DDEBUG_ON) # for WIN/Linux Logadd_definitions(-DDEBUG_LOG_ON) # for WIN/Linux Logadd_definitions(-DDEBUG_IMSHOW_OFF) # for OpenCV showadd_definitions(-DPLATFORM_WINDOWS)
endif ()
set(TNN_ROOT 3rdparty/TNN)
include_directories(${TNN_ROOT}/include)
include_directories(${TNN_ROOT}/third_party/opencl/include)
add_subdirectory(${TNN_ROOT}) # 添加外部项目文件夹
set(TNN -Wl,--whole-archive TNN -Wl,--no-whole-archive)# set TNN library
MESSAGE(STATUS "TNN_ROOT = ${TNN_ROOT}")# Detector
include_directories(src)
set(SRC_LISTsrc/yolov5.cppsrc/Interpreter.cpp)
add_library(dmcv SHARED ${SRC_LIST})
target_link_libraries(dmcv ${OpenCV_LIBS} base_utils)
MESSAGE(STATUS "DIR_SRCS = ${SRC_LIST}")#add_executable(Detector src/main.cpp)
#add_executable(Detector src/main_for_detect.cpp)
add_executable(Detector src/main_for_yolov5.cpp)
target_link_libraries(Detector dmcv ${TNN} -lpthread)(5)main源码
主程序src/main_for_yolov5.cpp中提供行手势识别的Demo,支持图片,视频和摄像头测试
//
// Created by Pan on 2018/6/24.
//#include <iostream>
#include <string>
#include <vector>
#include "file_utils.h"
#include "yolov5.h"
#include "image_utils.h"using namespace dl;
using namespace vision;
using namespace std;const int num_thread = 1;
DeviceType device = GPU; // 使用GPU运行,需要配置好OpenCL
//DeviceType device = CPU; // 使用CPU运行// 测试YOLOv5s_640
string proto_file = "../data/tnn/yolov5/yolov5s_640.opt.tnnproto";
string model_file = "../data/tnn/yolov5/yolov5s_640.opt.tnnmodel";
YOLOv5Param model_param = YOLOv5s_640;//模型参数// 测试YOLOv5s05_320
//string proto_file = "../data/tnn/yolov5/yolov5s05_320_anchor.opt.tnnproto";
//string model_file = "../data/tnn/yolov5/yolov5s05_320_anchor.opt.tnnmodel";
//YOLOv5Param model_param = YOLOv5s05_320;//模型参数// 设置检测阈值
const float scoreThresh = 0.3;
const float iouThresh = 0.3;
YOLOv5 *detector = new YOLOv5(model_file,proto_file,model_param,num_thread,device);/**** 测试图片文件* @return*/
int test_image_file() {// 测试图片string image_dir = "../data/test_image";vector<string> image_list = get_files_list(image_dir);for (string image_path:image_list) {cv::Mat bgr_image = cv::imread(image_path);if (bgr_image.empty()) continue;FrameInfo resultInfo;// 开始检测detector->detect(bgr_image, &resultInfo, scoreThresh, iouThresh);// 可视化代码detector->visualizeResult(bgr_image, &resultInfo);}printf("FINISHED.\n");return 0;
}/**** 测试视频文件* @return*/
int test_video_file() {string video_file = "../data/video/video-test.mp4"; //视频文件cv::VideoCapture cap;bool ret = get_video_capture(video_file, cap);cv::Mat frame;while (ret) {cap >> frame;if (frame.empty()) break;FrameInfo resultInfo;// 开始检测detector->detect(frame, &resultInfo, scoreThresh, iouThresh);// 可视化代码detector->visualizeResult(frame, &resultInfo, 30);}cap.release();delete detector;detector = nullptr;printf("FINISHED.\n");return 0;
}/**** 测试摄像头* @return*/
int test_camera() {int camera = 0; //摄像头ID号(请修改成自己摄像头ID号)cv::VideoCapture cap;bool ret = get_video_capture(camera, cap);cv::Mat frame;while (ret) {cap >> frame;if (frame.empty()) break;FrameInfo resultInfo;// 开始检测detector->detect(frame, &resultInfo, scoreThresh, iouThresh);// 可视化代码detector->visualizeResult(frame, &resultInfo, 10);}cap.release();delete detector;detector = nullptr;printf("FINISHED.\n");return 0;}int main() {//test_image_file();test_video_file();//test_camera();return 0;
}
(6)源码编译和运行
编译脚本,或者直接:bash build.sh
#!/usr/bin/env bash
if [ ! -d "build/" ];thenmkdir "build"
elseecho "exist build"
fi
cd build
cmake ..
make -j4
sleep 1
./Detector- 如果你要测试CPU运行的性能,请修改src/main_for_yolov5.cpp
DeviceType device = CPU;
- 如果你要测试GPU运行的性能,请修改src/main_for_yolov5.cpp (需配置好OpenCL)
DeviceType device = GPU; //默认使用GPU
纯C++推理模式需要耗时几秒的时间,而开启OpenCL加速后,GPU模式耗时仅需十几毫秒,性能极大的提高。
4. 手势识别检测效果
C++版本手势识别的检测效果与Python版本的检测效果几乎一致:

5. 项目源码下载
源码下载:C/C++实现手部检测和手势识别(含源码下载)
内容包含:
提供快速版yolov5s05手势识别,在普通手机可实时检测识别,CPU(4线程)约30ms左右,GPU约25ms左右
提供高精度版本yolov5s手势识别,CPU(4线程)约250ms左右,GPU约100ms左右
C/C++项目源码支持图片,视频,摄像头测试
项目配置好了base-utils和TNN,而OpenCV和OpenCL需要自行编译安装
6. 手势识别Android版本
【Android APP体验】https://download.csdn.net/download/guyuealian/86666991
APP在普通Android手机上可以达到实时的手势识别效果,CPU(4线程)约30ms左右,GPU约25ms左右 ,基本满足业务的性能需求。
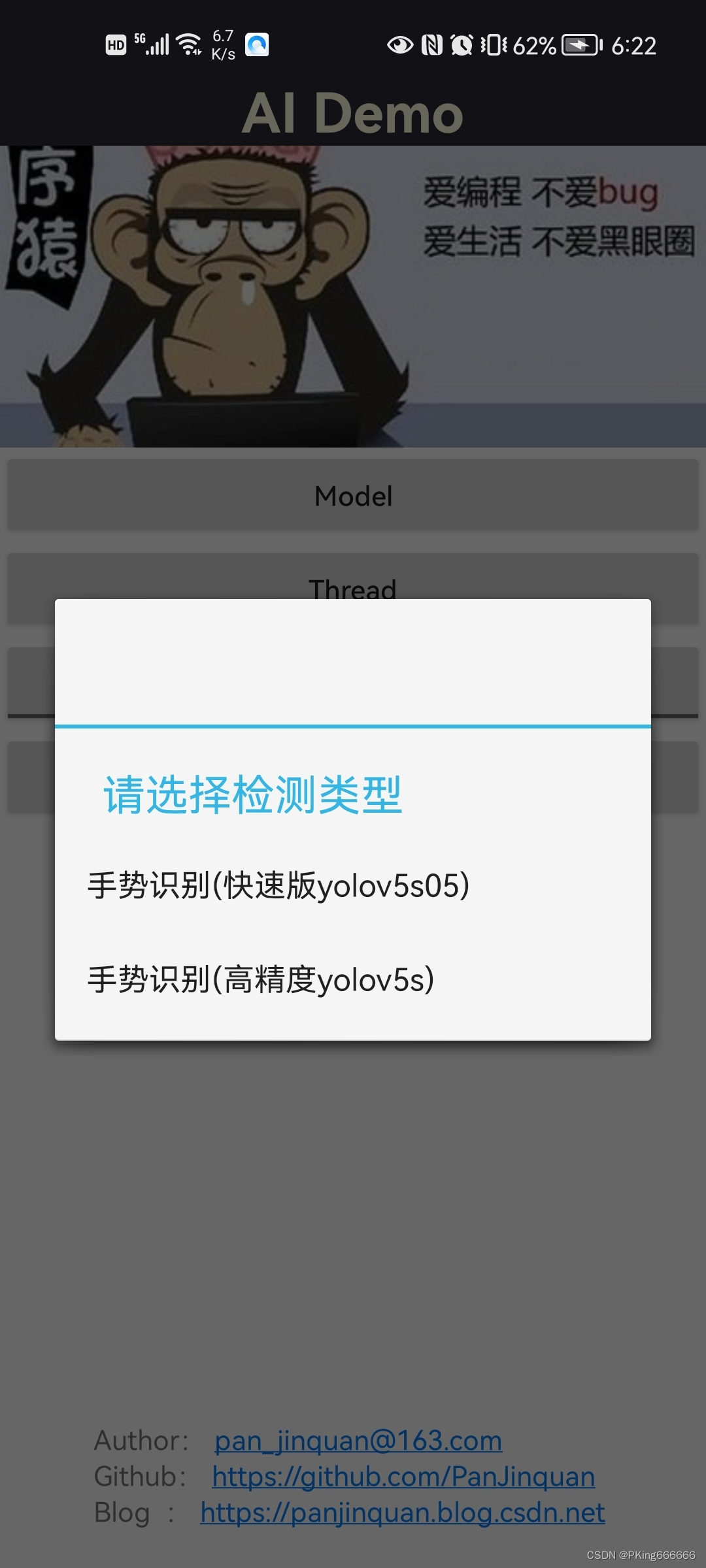 | 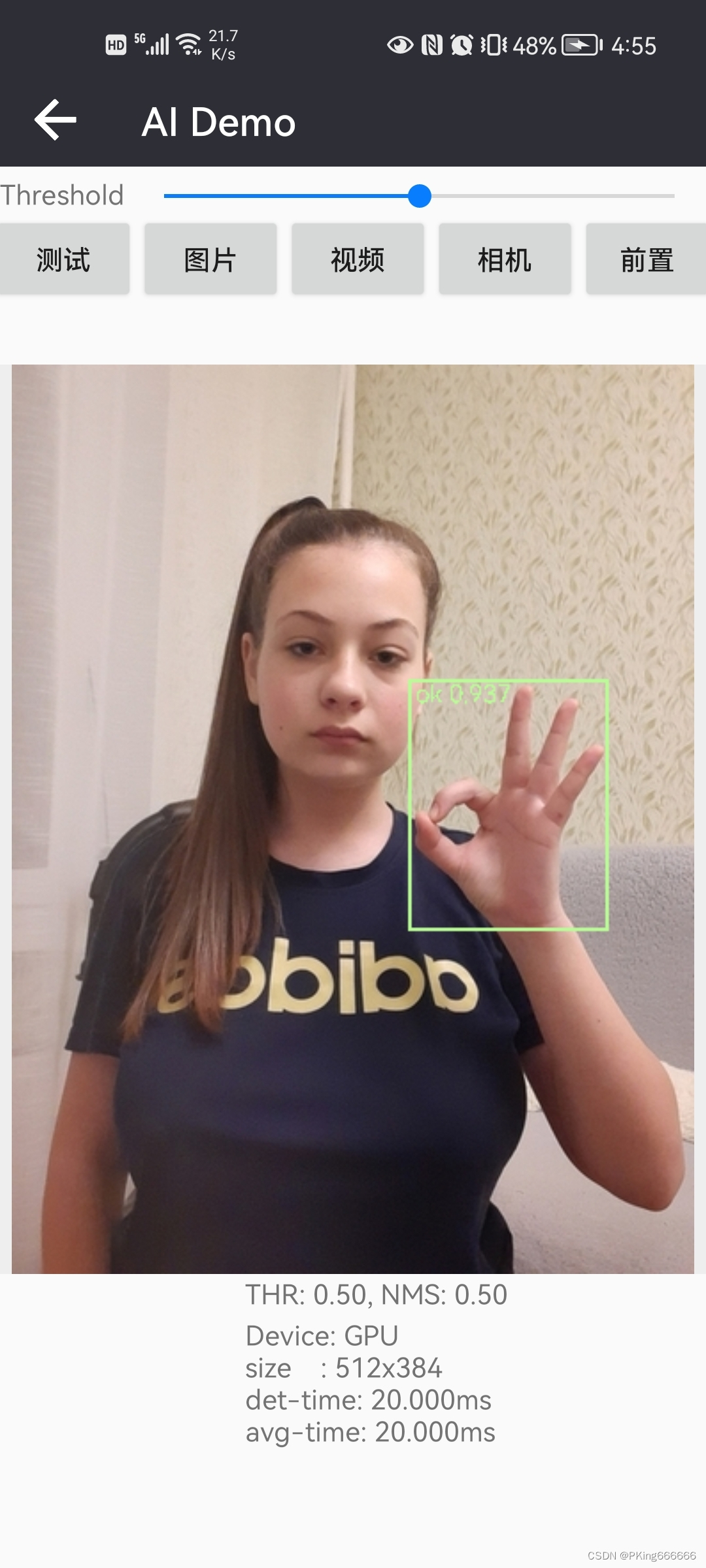 |  |
7.项目推荐:手部关键点检测
更多项目《手部关键点检测(手部姿势估计)》系列文章请参考:
- 手部关键点检测1:手部关键点(手部姿势估计)数据集(含下载链接)
- 手部关键点检测2:YOLOv5实现手部检测(含训练代码和数据集)
- 手部关键点检测3:Pytorch实现手部关键点检测(手部姿势估计)含训练代码和数据集
- 手部关键点检测4:Android实现手部关键点检测(手部姿势估计)含源码 可实时检测
- 手部关键点检测5:C++实现手部关键点检测(手部姿势估计)含源码 可实时检测




![]()
这篇关于手势识别4:C/C++实现手部检测和手势识别(含源码下载)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





