本文主要是介绍ros2智能小车中STM32地盘需要用到PWM的模块,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
我做的地盘比较简单,使用了一下模块:
4个直流减速电机,(每个模块用到了一个PWM)---这会通过L298N的ENA,ENB来实现控制
光电对射测速模块(不用PWM)
超声波测距模块(不用PWM,只需要测量时间)
sg90转向模块(用到了一个PWM)
其他什么红外测距什么的,蓝牙,WiFi都没用。我也没有用4个超声波测距哈哈,不知道安装100个是不是可当雷达用了
所以一共需要用到5个PWM,PA0----PA3用于控制4个电机,PB0用于控制sg90舵机
PA0------TIM2+CHANNEL1;这里更好的一个办法是直接电机引脚,启动相应的PWM,例如
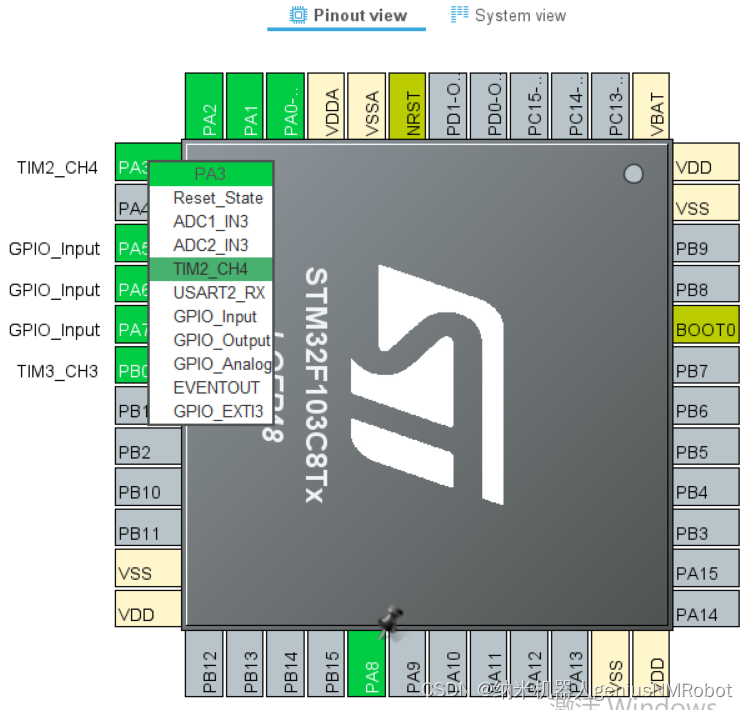
PA1------TIM2+CHANNEL2;
PA2------TIM2+CHANNEL3;
PA3------TIM2+CHANNEL4;
PB0-------TIM3+CHANNEL3;
这篇关于ros2智能小车中STM32地盘需要用到PWM的模块的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






