本文主要是介绍关于发那科机器人走modbus 通讯,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一.机器人IP设置。
1.按Menu,找到设置中的主机通讯,进入。
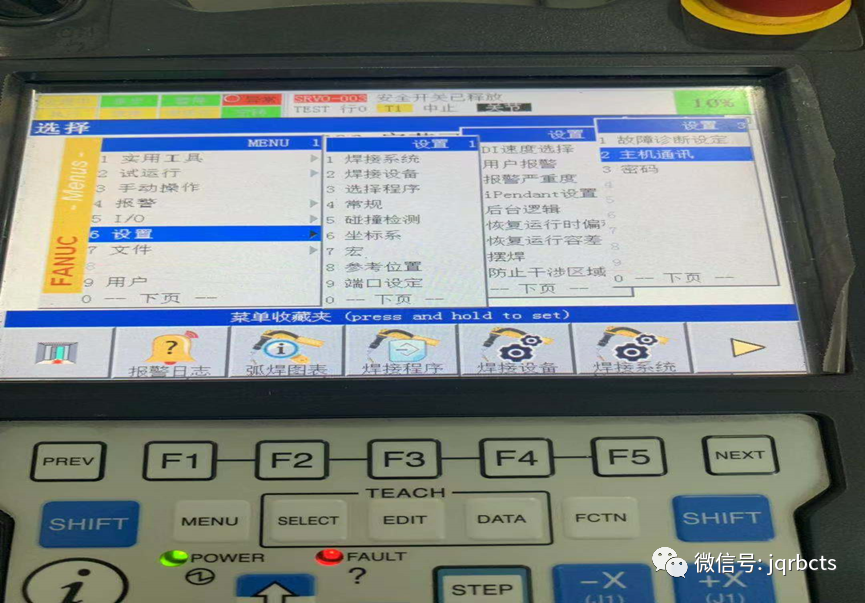
2.选择TCP/IP,Enter进入,修改IP地址。
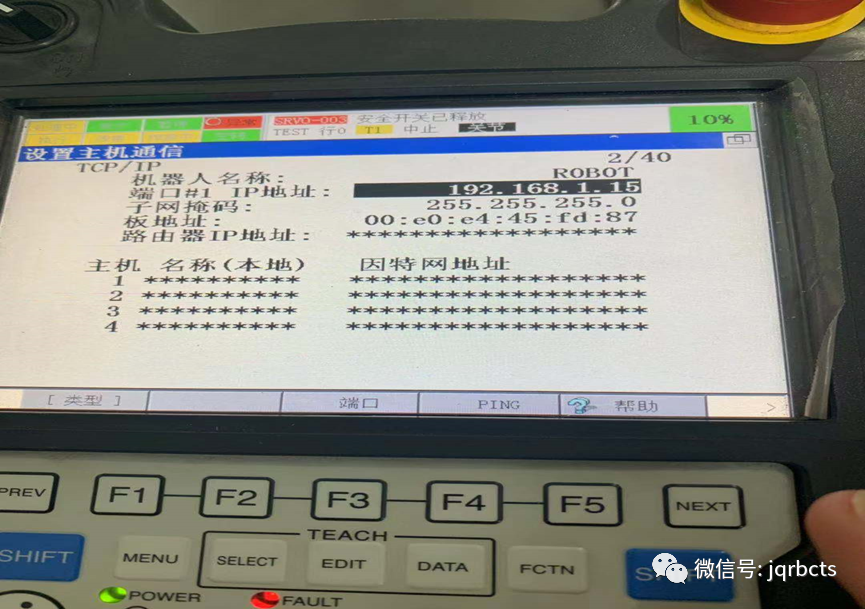
PLC的IP临时设置为19.168.1.88
机器人的ip设置为192.168.1.15
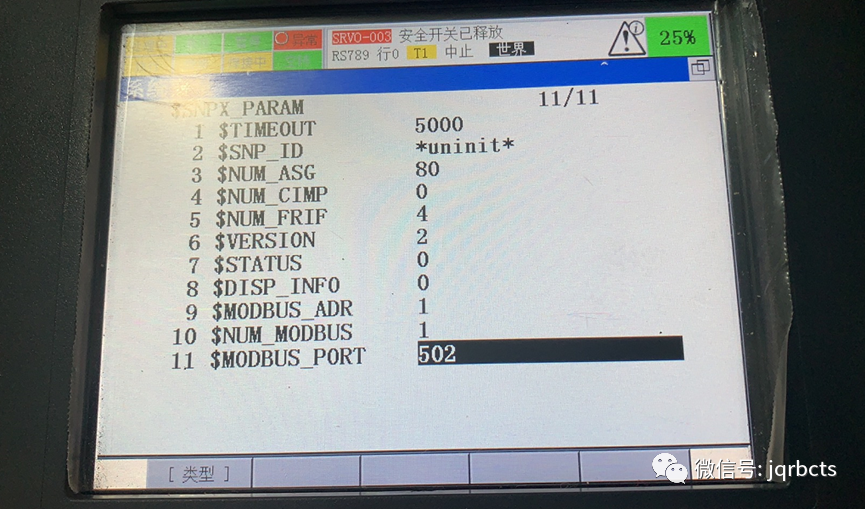
二.Modbus端口号设置。(默认502,一般不用设置)
1.按Menu找到系统变量,Enter进入。
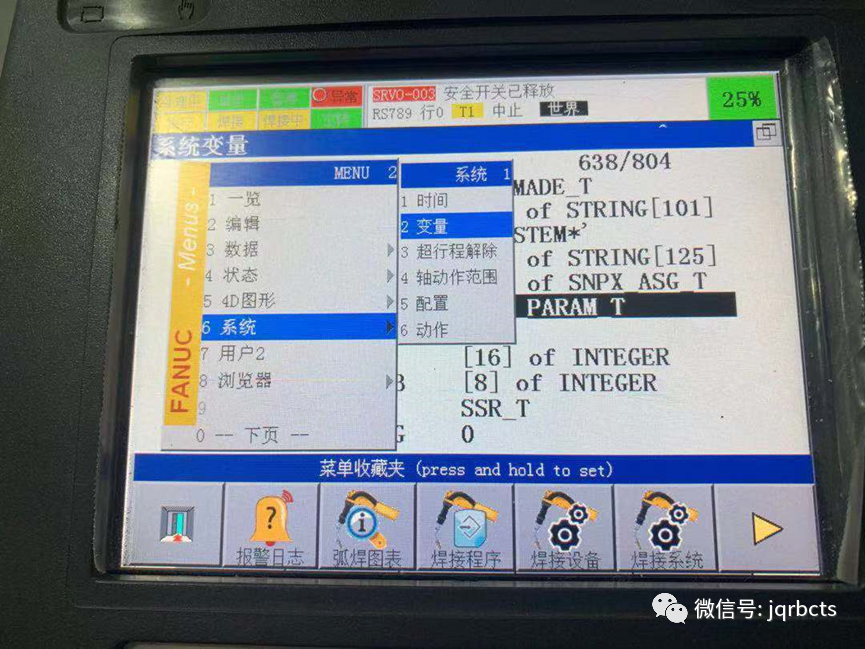
2.到大概638行左右找到SNPX_PARAM,Enter进入。
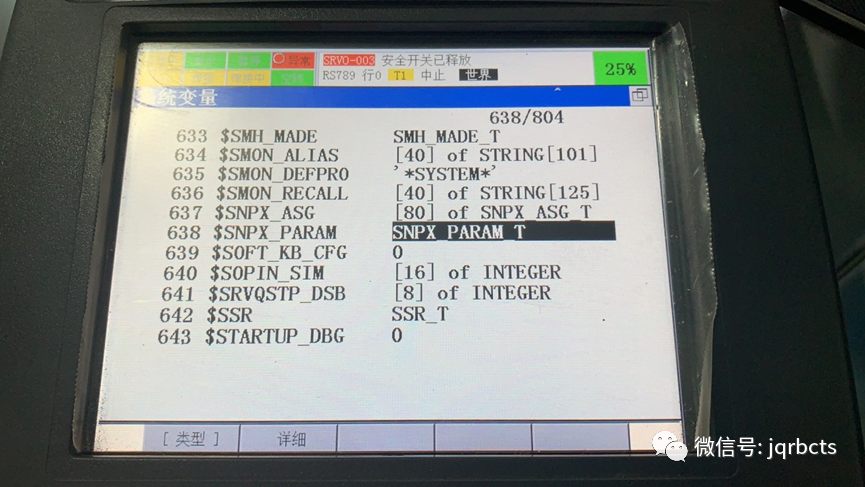
3.默认端口号502。
三.专用信号设置。
1.按Menu找到I/O,选择UOP,进入下面画面,可以查看机器人专用信号。

按F3 IN/OUT可以在输入输出之间切换。(输入中1,3,8三个信号必须ON,机器人才会启动。)
2.按F2 分配进行设置。

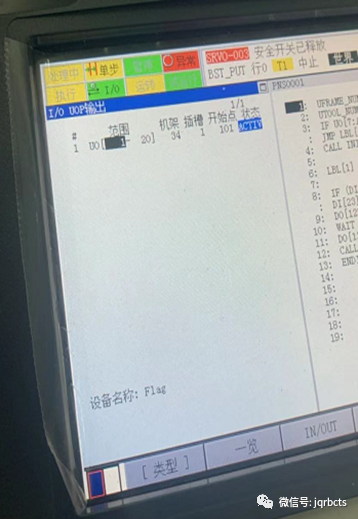
按图设置即可,F3 IN/OUT可以进行输出输出切换。
四.通用信号设置。
按Menu找到I/O,选择数字,进入,可以查看机器人专用信号,按F2 分配进行地址设置。
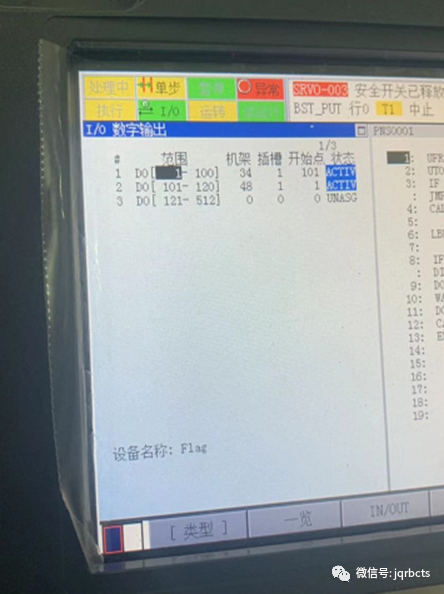

如图设置即可。
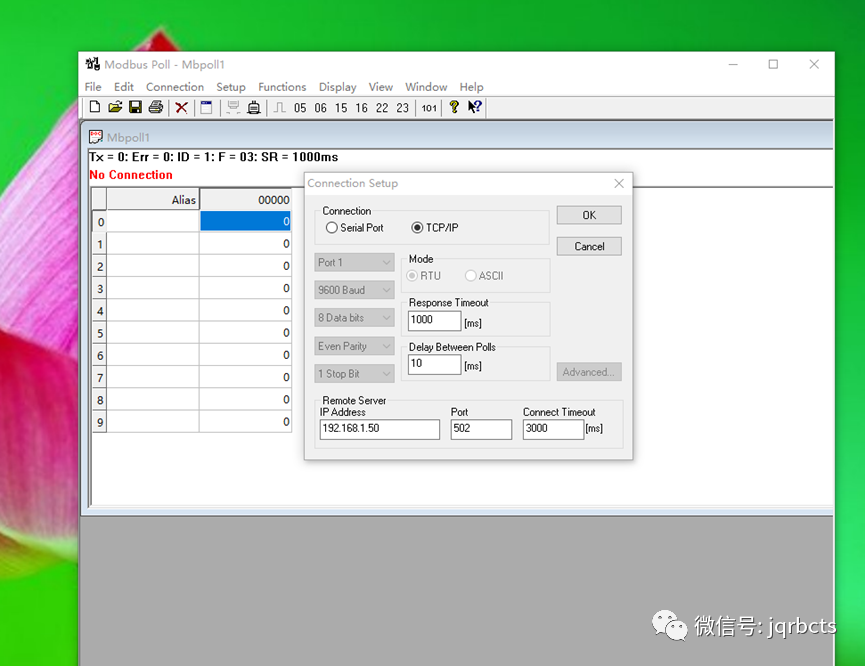
Modbus poll 为主站软件 Modbus slave 为从站软件
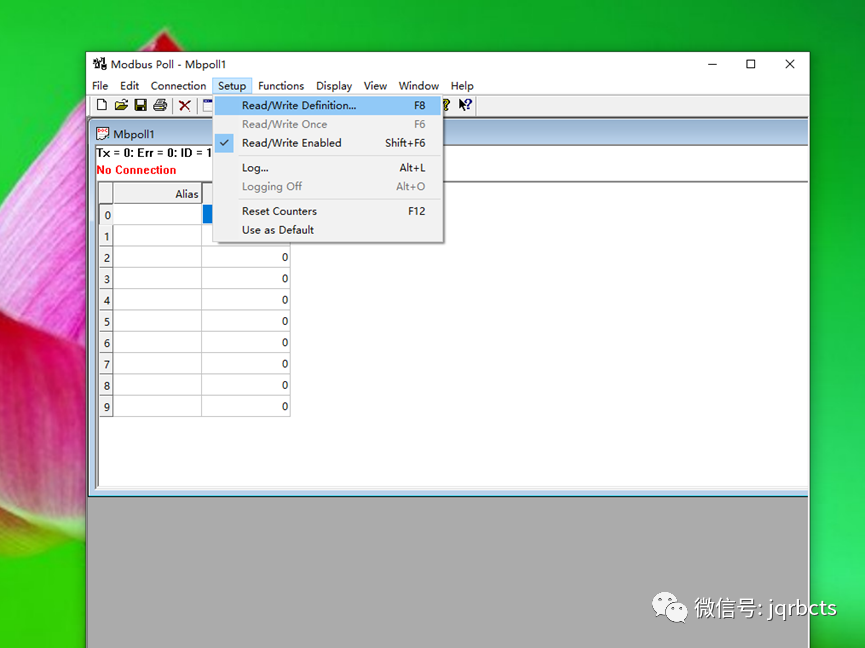
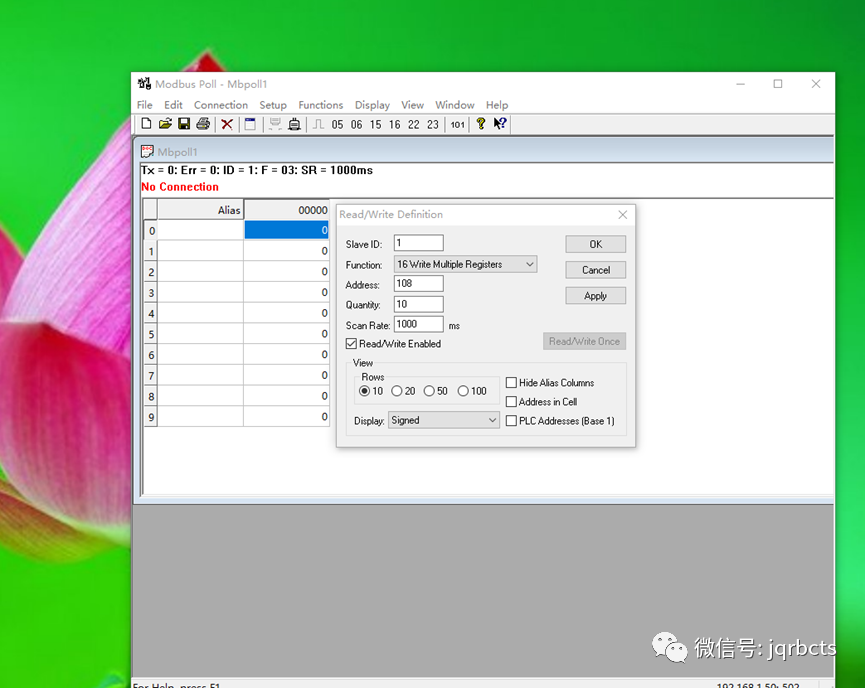
可以用modbus 软件测试

设置需要通讯的ip地址和端口
这篇关于关于发那科机器人走modbus 通讯的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








