本文主要是介绍kaist数据集雷达和imu外参计算,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
跑lio-sam要计算imu和雷达外参
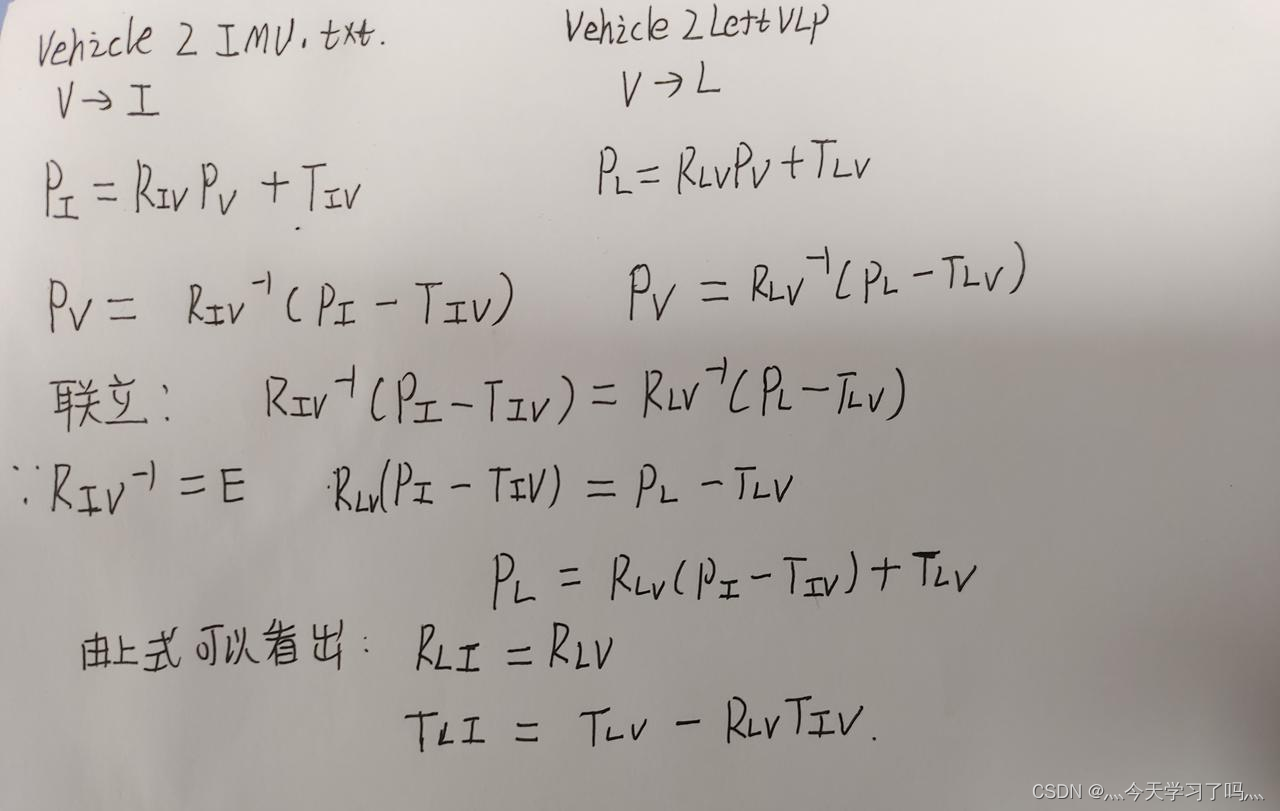
根据数据集提供的文件
 根据文件名确定旋转矩阵下标
根据文件名确定旋转矩阵下标
 得出结果:(将imu数据转到雷达坐标系下)
得出结果:(将imu数据转到雷达坐标系下)
T:[ 0.360723,-0.431236, 0.687047]
R:[-0.515105, -0.702383,-0.491249,
0.487008, -0.711468, 0.506593,
-0.70533, 0.0217062, 0.708547]
不知道这样算对不对?
这篇关于kaist数据集雷达和imu外参计算的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





