本文主要是介绍QMI8658 - 姿态传感的零偏(常值零偏)标定,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 零偏
理论上在静止状态下三轴输出为0,0,0,但实际上输出有一个小的偏置,这是零偏的静态分量(也称固定零偏)。
陀螺生产出来后就一直固定不变的零偏值。对于传统的高性能惯性器件来说,该误差在出厂标定时往往就被补偿干净了,因此不会标注这个指标;
但对于低端MEMS IMU芯片来说,则不可能做逐个的标定和补偿,因此常会存在deg/s(也就是几千deg/h)量级的常值零偏。这看上去巨大无比,但我们在实际使用中很容易对付,例如在初始启动过程中利用几秒钟的静态数据求平均即可扣掉大部分。
2. QMI8658 姿态传感器标定前后数据对比
标定条件
1) 下面的数据是将 QMI8658 姿态传感 Z 轴向上,静止放置在水平桌面上
2) 采集1分钟的数据
3) 加速度计的量程为 ±8g; ODR 500Hz
4) 陀螺仪的量程为 ±2048dps; ODR 500Hz
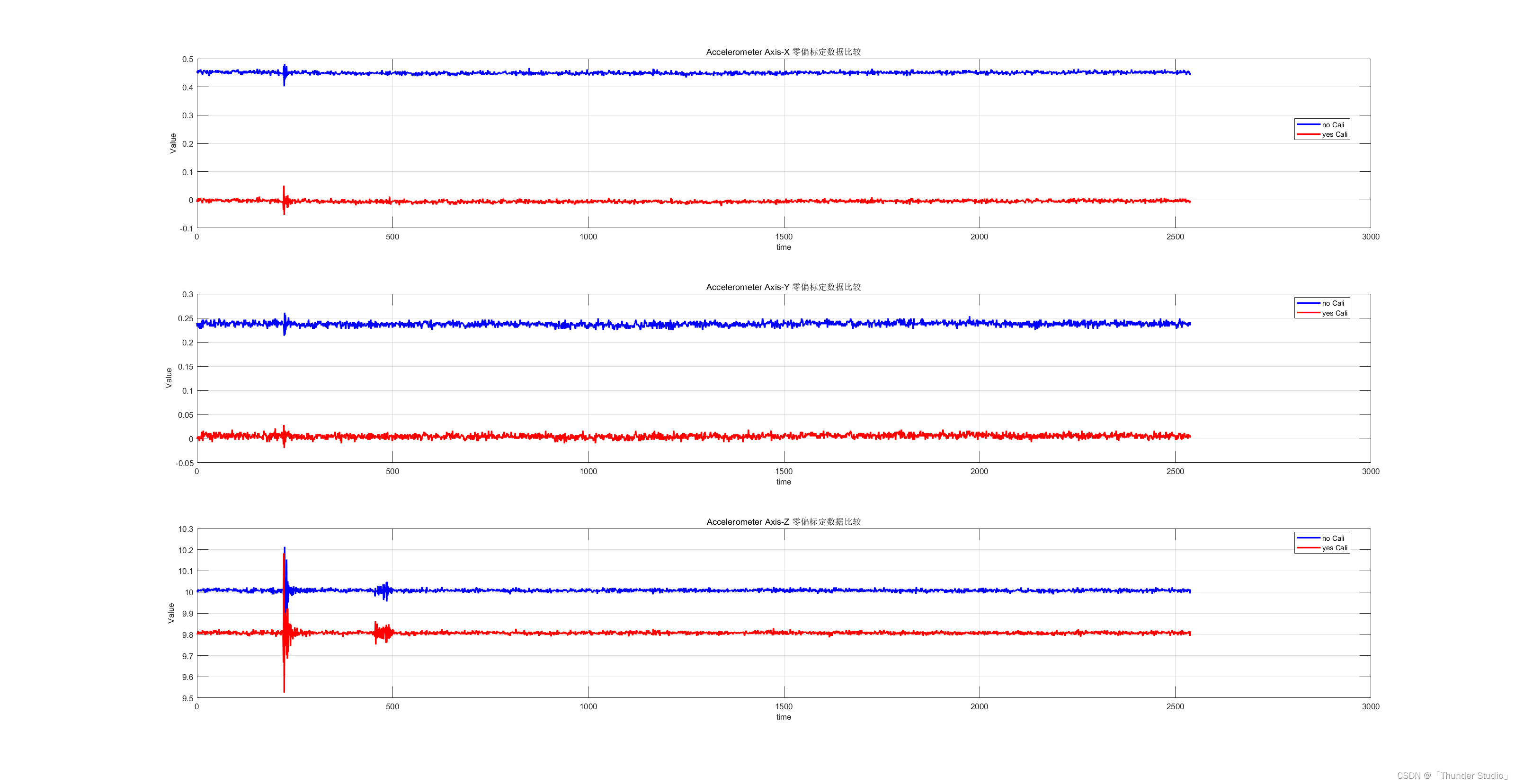 上图是加速度计标定前后数据对比,蓝色曲线是未进行标定的,单位为 m/S^2 的原始数据;蓝色曲线标定过后的数据
上图是加速度计标定前后数据对比,蓝色曲线是未进行标定的,单位为 m/S^2 的原始数据;蓝色曲线标定过后的数据
标定前的原始数据, X轴数据在 0.4 m/S^2 以上,Y轴数据在 0.25 m/S^2,经过标定算法后,X轴/Y轴均趋近于 0 m/S^2。同样,Z轴的数据由原来的10 m//S^2,标定到9.8 m//S^2.
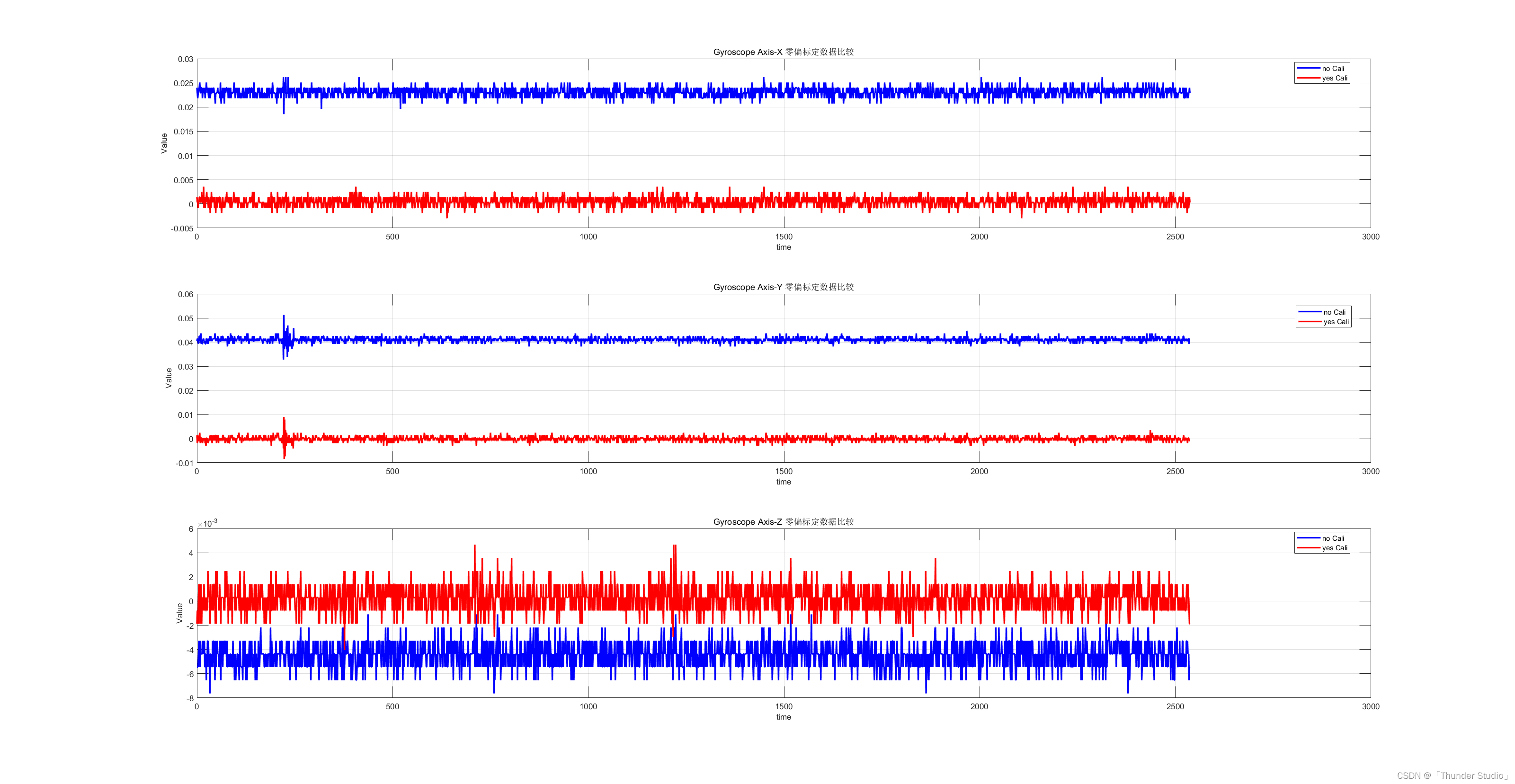
上图是陀螺仪标定前后数据对比,陀螺各轴数据均标定到趋近于 0。
这篇关于QMI8658 - 姿态传感的零偏(常值零偏)标定的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!