零偏专题
imu的静止零偏噪声标定与积分
示例使用的Imu为轮趣科技 n100 mini其中imu出来的数据的坐标系是基于ROS坐标系的 Eigen::Quaterniond q_ahrs(ahrs_frame_.frame.data.data_pack.Qw,ahrs_frame_.frame.data.data_pack.Qx,ahrs_frame_.frame.data.data_pack.Qy,ahrs_frame_.fram
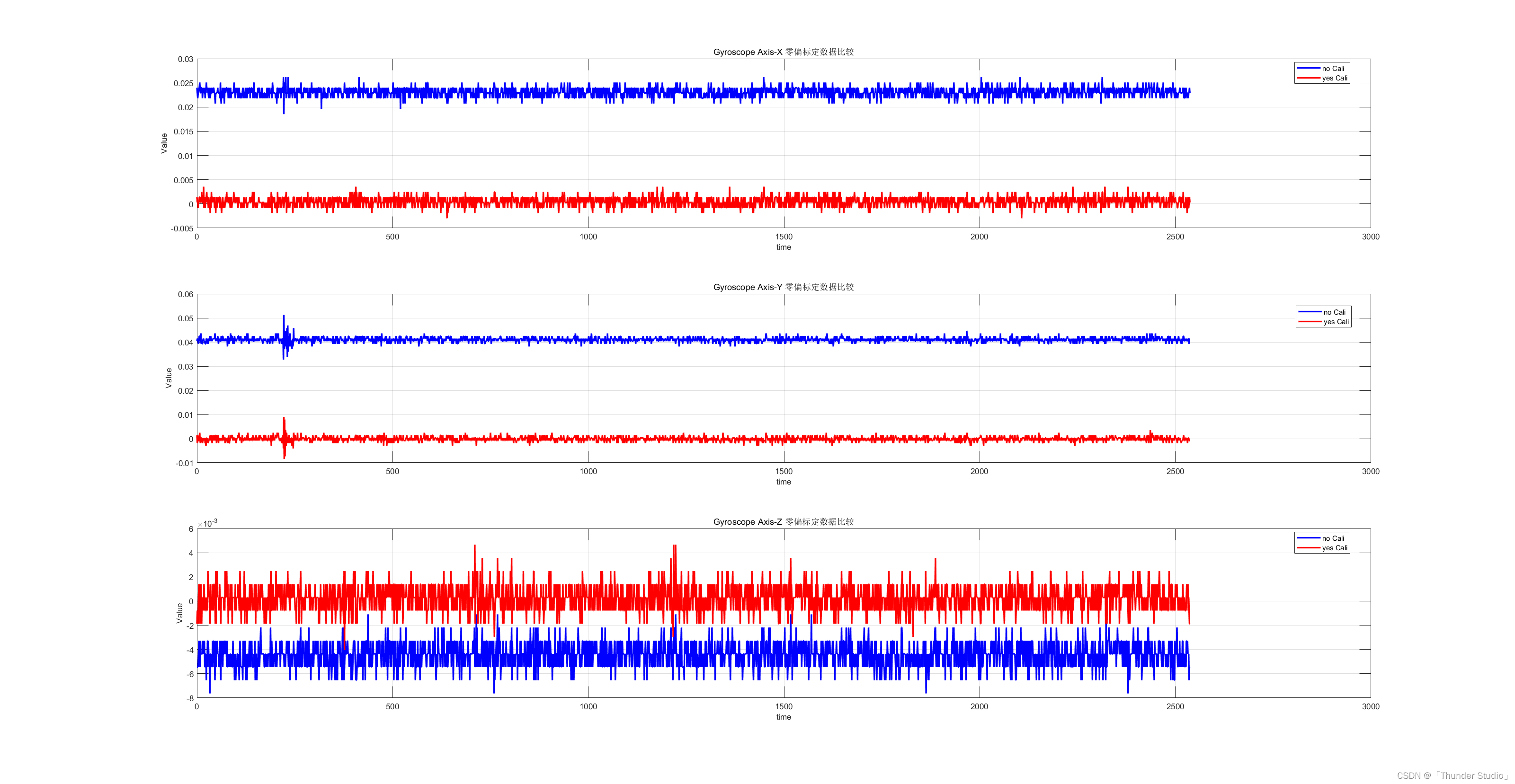
QMI8658 - 姿态传感的零偏(常值零偏)标定
1. 零偏 理论上在静止状态下三轴输出为0,0,0,但实际上输出有一个小的偏置,这是零偏的静态分量(也称固定零偏)。 陀螺生产出来后就一直固定不变的零偏值。对于传统的高性能惯性器件来说,该误差在出厂标定时往往就被补偿干净了,因此不会标注这个指标; 但对于低端MEMS IMU芯片来说,则不可能做逐个的标定和补偿,因此常会存在deg/s(也就是几千deg/h)量级的常值零偏。这看上去巨大无比,但我