本文主要是介绍伸手运动想象训练与伸手抓取想象的关系,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

本研究旨在确定为期4周的目标导向性伸手(抓取任务)的运动想象训练(MIT)是否会以相同的方式影响伸手(MIR)和抓取(MIG)运动想象的皮质活动。
试验过程中,我们在健康的年轻参与者中检测与事件相关电位(ERPs)相关的皮层活动,评估了图像的主观生动性。此外,本研究的目的旨在确定运动想象(MI)达到和掌握能力的主观评估与训练前后这些任务中的皮质活动之间的关系,以了解潜在的神经可塑性机制。
研究发现,MIT对与伸手相关的脑电图信号的影响不同于抓取,MIR的效果比MIG更明显。结果表明,由于MIT引起的评估参数的变化降低了想象主观评价与EEG信号之间的关系。
01
实验与方法
参与试验者:27名健康志愿者(12女15男)(年龄:25±3岁;高度:1.72±0.09 m;体重:71±13.8 kg)参与实验。根据爱丁堡惯用手清单,他们是右撇子。根据《运动想象问卷修订版第二版》的评估,他们也有中等程度的运动感官想象运动任务的能力(32±8)。注意,该模式的最小值为7,最大值为49。此外,志愿者没有运动或神经损伤。

图1.实验方案方案,包括第0阶段的熟悉训练和运动想象训练前后两个类似的测量阶段。
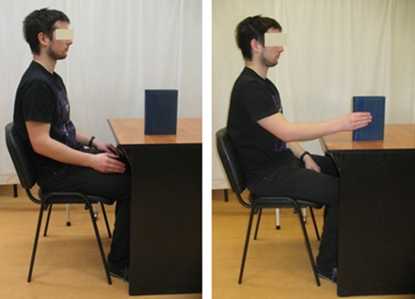
图2.受试者在完成抓书动作想象训练时的姿势。在开始心理排练之前,参与者用左右上肢进行三次身体上的这个动作,注意伴随这个动作的动觉。
02
伸手去抓一本书的运动想象训练(MIT)
在每次训练开始时,受试者在进行非支配性上肢部分训练之前,分别用右上肢进行三次伸手抓书的动作和用左上肢进行三次伸手抓书的动作。所有参与者每次会议都使用同一本书。这一部分的培训课程向参与者介绍了书的位置和特点(如大小、重量、表面粗糙度和易碎性),这是中枢神经系统用来规划这种目标导向的动作的。
该位置与参与者的距离总是相同的,所有参与者都是相似的。需要在肩关节处弯曲约30°的角度来抓书(图2)。使用的是全手杆状抓书,将书垂直放置在书桌上。它包括保持手指伸直(图2)。在动作执行试验中,指导员要求注意伴随动作的动觉。动觉的顺序指的是与这个运动的自然过程相对应的到达和抓取。然后,拿走这本书,并指导参与者在心理训练中放松,不要做任何动作或肌肉收缩。
短暂的休息后,MIT开始。在每次试验中,被试都被要求回忆他们在功能性伸手抓书时的动觉感觉。实验对象睁开眼睛标志着实验结束,指导员开始测量20秒的休息时间。15秒后,指导员发出“注意”命令。然后,受试者闭上眼睛,另一项试验开始。指导员观察着他们。每次训练包括三组10次试验,分别用左右上肢进行。两上肢各三组,试十次。先用右上肢进行试验,然后是左上肢。两组之间休息20秒,两组之间休息3分钟,左右上肢之间休息15分钟。在一次训练中,被试想象用右上肢抓书30次(10次×3组),用左上肢抓书30次(10次×3组)。一次训练时间在50到52分钟之间,取决于个人的MI时间。
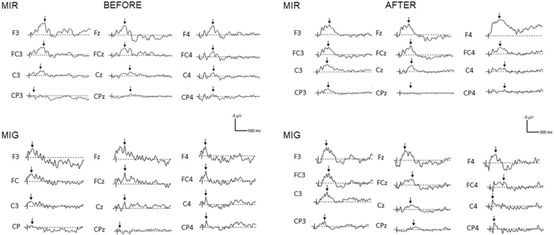
在选定的电极和测量阶段(前后),在达到运动想象(MIR)和抓取运动想象(MIG)期间ERP的个体模式。垂直线表示触发器发生的时间,箭头表示ERP振幅。
在熟悉阶段(第0阶段,图1)后,受试者完成运动想象问卷修订版。训练前后的测量课程以同样的方式进行,在连续两天的早上进行。在两个课程的第一天,参与者想象达到20倍,即MIR。在实验过程中,记录脑电图和肌电图信号。
参与者在测量的第二天分别进行伸手和抓取。然而,他们在第一天就收到了有关这方面的初步信息。为了验证所完成的MI任务的生态性,在MIR重复20次和MIG重复20次后,参与者立即在10厘米的视觉模拟量表(VAS)上标记一条水平线,从0(非常容易感觉到)到10(非常难以感觉到)。因此,该研究评估的是动觉的生动性(“感觉”),而不是任务的形象化(“看到”)。
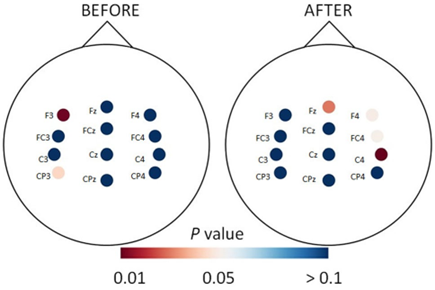
热图描述了在运动想象训练前后四周的达到运动想象(MIR)和抓取运动想象(MIG)之间的ERP振幅两两比较的P值。
03
结论
本研究展示了目标导向性伸手的动觉MIT对该运动的两个组成部分(根据该目标导向运动的经典神经控制方法)的MI的影响,即健康青年参与者的优势上肢伸手到达和抓取,以及这些任务的主观生动性。分析得出的结论是,这种训练对伸手和抓取的影响是不同的。
这种效应在“伸手”的想象上比“抓住”的想象上更为明显。在两个任务和会话中,前运动皮层上方的电极的ERP振幅都高于感觉运动皮层。并且,使用依赖的MIR和MIG能力的变化,以及在这些任务中的皮质活动(就ERP而言)改变了两者之间的相关性。因此,想象任务的应用主观评价不能是对心理训练过程中ERP所表达的大脑皮层生物电活动的简单的功能性洞察。这些发现与神经康复和心理训练的目标导向达成有关。训练后ERP的变化可能有利于非侵入性脑电图在BCI背景下的使用。
参考链接:
https://www.nature.com/articles/s41598-022-21890-1
版权声明:本文版权属于原作者,仅用于学术交流
更多阅读
新型脑机接口最新临床前神经数据公布
中国信通院招聘脑机接口方向研究员
支持灵活学习和记忆的神经网络
基于耳-脑电图的脑机接口研究进展
呼吸如何塑造我们的大脑?
无屏幕BCI系统也有强大的分类性能
瘫痪患者借助脑机接口可进行数字绘画
加入社群
欢迎加入脑机接口社区交流群,
探讨脑机接口领域话题,实时跟踪脑机接口前沿。
加微信群:
添加微信:RoseBCI【备注:姓名+行业/专业】。
加QQ群:104048131
欢迎来稿
1.欢迎来稿。投稿咨询,请联系微信:RoseBCI
2.加入社区成为兼职创作者,请联系微信:RoseBCI


点个在看祝你开心一整天!
这篇关于伸手运动想象训练与伸手抓取想象的关系的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




