本文主要是介绍【多停车场车位预测】Prediction of Vacant Parking Spaces in Multiple Parking Lots:A DWT-ConvGRU-BRC Model,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于DWT-ConvGRU-BRC模型的多停车场车位预测
期刊:applied science
Received: 21 February 2023
Revised: 14 March 2023
Accepted: 15 March 2023
Published: 16 March 2023
摘要
对于城市来说,“停车难、停车乱”的问题增加了碳排放,降低了生活质量。准确有效地预测空车位(VPSs)的可用性可以帮助驾车者减少寻找停车位的时间,减少温室气体污染。本文提出了一种深度学习模型DWT-ConvGRU-BRC,用于预测多个停车场中VPSs的未来可用性。该模型首先利用离散小波变换(DWT)对历史停车数据进行去噪,然后利用卷积门控循环单元网络(ConvGRU)提取停车场本身的时间相关性和不同停车场之间的空间相关性,同时利用BN-ReLU-Conv (1 × 1)模块进一步提高预测过程中特征的传播和重用性。此外,该模型使用可用性、温度、湿度、风速、工作日和周末作为输入,以提高预测的准确性。以圣莫尼卡市11个停车场为例,对模型的性能进行了评价。DWT-ConvGRU-BRC模型优于LSTM和GRU基线方法,在预测随后60分钟内多个停车场占用情况时,平均测试MAPE为2.12%。
关键词:停车预测;深度学习;离散小波变换;卷积门控循环单元网络;多个停车场
1 介绍
随着经济和人口的增长,机动车保有量快速增长,加剧了城市空置车位的供需失衡。司机通常花费3.5-14分钟寻找VPS,而巡航寻找VPS占交通流量的8-74%。司机花在寻找vps上的过多时间增加了时间成本、燃料消耗和排放,并导致交通拥堵。
停车困难和无序停车问题往往受到可达性、停车价格和vps数量的影响。
为了解决这个问题,已经开发了一些停车管理和诱导系统来提供实时VPS信息[3-6]。这些系统通常使用摄像头和传感器收集实时可用的停车数据[7,8]。此外,一些基于人群感知的方案使用移动通信设备和车载传感器监测街道停车位的可用性[9,10]。然而,这些停车引导系统不能保证VPS的实时性。也就是说,当司机到达指定的停车位时,停车位可能已经被占用了。由于传感器设备和维护实时停车信息的成本较高,Y等[11]和百度Maps提出了一个名为Du-parking的模型来估计整个城市的实时停车可用性。因此,为了使车主能够有目的地找到停车位,有必要开发一种具有预测算法的停车引导信息系统,帮助驾驶员规划行驶路线,寻找vps,降低驾驶成本[12]能协助交通规划及管理,减少能源消耗及交通挤塞。
本文提出了DWT-ConvGRU-BRC模型。该模型由离散小波变换(DWT)[13]、卷积GRU网络(ConvGRUs)[14]、两层线性网络和三个连续操作的复合函数组成,即批归一化(BN)、整流线性激活(ReLU)和1 × 1卷积(Conv),记为BRC。首先,我们使用DWT对VPS数据进行去噪。预测前降噪可以消除VPS数据本身的波动性。然后,我们使用基于深度学习的预测模型,该模型利用ConvGRUs和双层线性网络来整合网络中获取的多个数据源的时空特征。最后,利用BRC复合函数进一步改进了预测过程中特征的传播和重用。
本文对文献的贡献如下:
•提出了基于深度学习的多车位车位预测模型。该模型考虑了停车噪声数据的处理以及多个停车场的空间相关性和停车场本身的时间相关性,并使用停车场占用率、温度、湿度、风速、工作日和节假日等多种因素来预测可用车位的数量。
•我们提出的DWT-ConvGRU-BRC模型可以同时预测多个停车场的可用停车位数量。具体而言,使用ConvGRU捕获多个停车场的时空特征,使用两层线性层提取外部影响,并使用BRC进一步提高预测过程中特征的传播和重用。
•通过圣莫尼卡地区的一个案例研究来评估该方法的性能。结果表明,该模型优于LSTM、GRU、ConvGRU和dConvLSTM-DCN模型等其他基准方法。此外,结果证明了DWT预测精度的提高,以及将工作日、假期和天气特征纳入停车场占用率预测的有效性。
本文的其余部分组织如下:第2节总结了文献综述。第3节详细描述DWT-ConvGRU-BRC预测模型。第4节给出了对比实验的结果和分析。最后,我们在第5节中提供了我们的结论并讨论了可能的未来工作。
2. 文献综述
随着传感器技术的突破,访问VPS数据变得更加容易。然而,在实际应用中获得的VPS数据往往会受到不同程度的噪声污染。如何对传感器采集的数据进行有效处理,提高算法的精度,是目前许多预测方法仍然面临的棘手问题。为了解决这个问题,小波分析在最近的一些研究中得到了应用,并被证明是有效的。如Li等[15]利用小波函数对VPS数据进行多尺度小波分解和重构,利用小波神经网络的隐层函数提高预测精度。Ji等人[16]提出了基于小波变换的多步碰撞车位预测研究,并结合阈值降噪的多步预测策略,进一步提高预测精度。因此,有效的去噪有助于提高预测的效率和准确性。
对多个停车场的入住率进行预测是解决“停车难”问题的必要环节之一。近年来,VPS预测分为两类:一类是基于统计预测模型,另一类是基于机器学习(ML)和深度学习(DL)。在统计预测模型方面,Caliskan等[17]将连续马尔可夫模型与排队理论模型相结合,预测了目的地区域停车场的占用状况。在此基础上,肖等人[10]提出了一个连续时间马尔可夫M\M\C\C模型来预测可用停车位。Caicedo等人[0]提出了一种利用历史信息预测每个停车场可用性的实时可用动态算法。此外,Rajabioun等人开发了一种矢量时空自回归模型,可用于预测驾驶员估计到达时间在街道上和街道外停车地点的停车位可用性。Peng等人将停车场的离散入住率建模为非平稳泊松过程,并提出了一种经济有效的寻找停车位的方法。Abdeen等人[22]提出了一种智能停车算法,该算法通过改变可用性、大门等待时间、停车成本、交通拥堵和到停车场的行驶距离这五个因素的权重,实现交通均衡分配和停车场地的最佳利用。事实上,这些统计预测模型高度依赖于对到达和离开过程的假设,因此难以适应停车交通流量的剧烈波动。
对于ML/DP预测模型,研究人员已经应用了回归树、支持向量机(svm)、支持向量回归(SVR)、神经网络、k近邻(KNN)和随机森林模型等模型来预测停车位可用性[23-27]。Hu等[28]将支持向量回归(SVR)和果蝇优化算法(FOA)相结合来预测空车位数量。Fan等[29]利用网格搜索方法对多步长短期记忆递归神经网络(LSTM-NN)模型进行优化,用于预测空车位数量。此外,许多学者将非线性系统理论和优化算法与神经网络相结合,以提高预测精度。例如,Vlahogianni等[30]使用遗传算法优化的多层感知(MLP)来预测随后30分钟内区域停车场的入住率。Camero等[31]使用遗传算法(GA)结合递归神经网络(RNN)来预测伯明翰的停车场入住率。Zeng等[32]将小波变换(WT)与双向LSTM (Bi-LSTM)相结合,利用阈值降噪进一步提高预测精度。
此外,也有学者考虑了天气、节假日等外部因素对VPS预报的影响。Fokker等人[[33]]探讨了天气等外部因素对停车占用率的影响,发现外部因素使预测性能提高了8%。在Zhang的[34]工作中,提出了一个PewLSTM,通过结合天气和停车周期的影响来预测停车行为。Zeng等人[35]提出了一种堆叠门控循环单元(GRU)-LSTM模型,该模型结合了GRU的效率和LSTM的精度,并将各种因素作为输入,如天气,来预测停车位的可用性。ML/DL方法可以自动从过去的样本中学习,以更好地描述复杂的非线性问题。然而,上述ML/DP方法只考虑了VPS数据的时间相关性,没有考虑多个停车场VPS数据的空间相关性。
因此,本文提出了DWT-ConvGRU-BRC模型来预测多个停车场中VPSs的数量。我们的模型结合了小波变换的优点。在获取多个停车场数据的时空相关性的同时,还将天气等外部因素作为输入,提高模型的准确性。之前与我们的方法相关的研究包括DWT-Bi-LSTM[32]和dConvLSTM-DCN[36]。
3方法。
3.1数据描述
为了评估所提出的预测模型的性能,我们在美国加利福尼亚州的圣莫尼卡进行了一个案例研究(经度范围:[−118.499378,−188.49361],纬度范围:[34.019575,34.010806]),该地区有11个停车场分散在路网上,如图1所示。数据于2021年4月6日至2021年5月13日收集。每5分钟收集vps个数,得到每个停车场10944条历史数据。
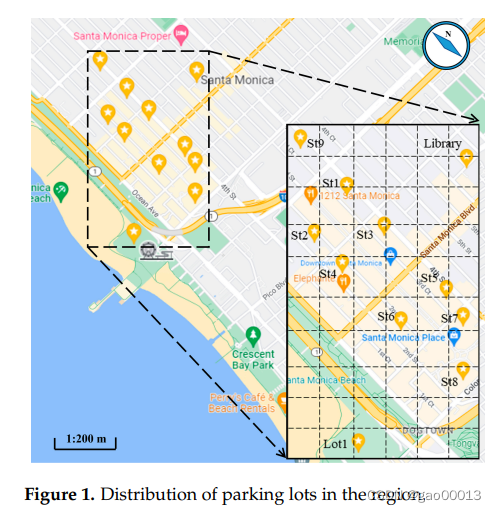
图1所示。区域内停车场分布情况
我们使用100米× 100米的网格将目标区域划分为H × W网格(图1)。区域内的每个停车场分布在不同的网格中,没有停车场分布的网格认为该网格中没有vps。则t时刻区域内vps的个数记为:
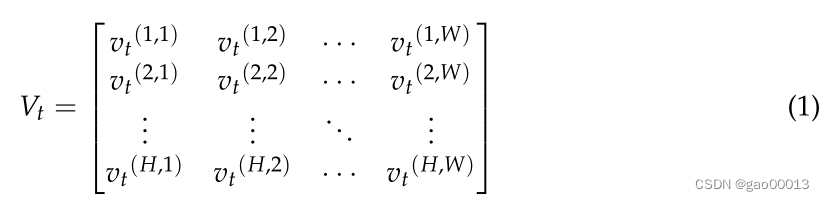
其中,矩阵中的每个元素,记为, h∈[0,H], w∈[0,W],表示网格(h,w)中
的个数。该区域共划分为60个网格,H为10,W为6。
我们在网格区域选择的11个停车场分别是St1-St9停车场、Lot1停车场和Library停车场。这些停车场主要分布在休闲、商业和住宅区。值得注意的是,这些停车场空间数量的演变有相似之处,也有差异。我们可以想象,停车场类型越接近,距离越近,就越应该具有时空相关的特征。我们以Lot1、St5、St7停车场为例,考虑到St5、St7停车场代表商业区且距离较近,Lot1停车场代表娱乐区,从时空相关性的角度挖掘不同停车场的特征。
图2和图3显示了这3个停车场的时空特征。x轴表示时间间隔。y轴表示的变化,其中正值表示车辆流出量。数字越大,表示
数量越多。从图2可以看出,在Lot1停车场几乎满负荷的情况下,周末的流量明显高于工作日。Lot1停车场是一个娱乐区,在周末往往很拥挤。相比之下,在上午7点到9点之间,平日St5和St7停车场的进车量高于周末,这可能受到商场工作人员停车的影响。此外,我们还探讨了天气因素对
可用性的影响。

危险天气和正常天气的停车占用次数不同。可以想象,当遇到大雨、大雪和雾霾等危险天气时,人们可能会减少乘坐私家车出行,因此可用停车位的数量会增加。三个具有代表性的停车场的结果如图3所示。对于以Lot1为代表的娱乐区和以St5和St7为代表的商业区,在危险的天气条件下,一天中的所有时间都观察到停车占用率显著下降。为了评估危险天气条件对停车需求的影响,如果满足以下一个或多个条件,我们将天气定义为危险天气:(1)雾或雪,(2)风速大于39公里/小时,(3)降水强度大于0.15英寸/小时。所有其他条件均视为正常天气条件。与杨等人[38]和赵等人[39]的研究类似,我们在第4节中进行了消融实验,以探索天气等外部因素对停车预测的影响。
3.2 Prediction Model
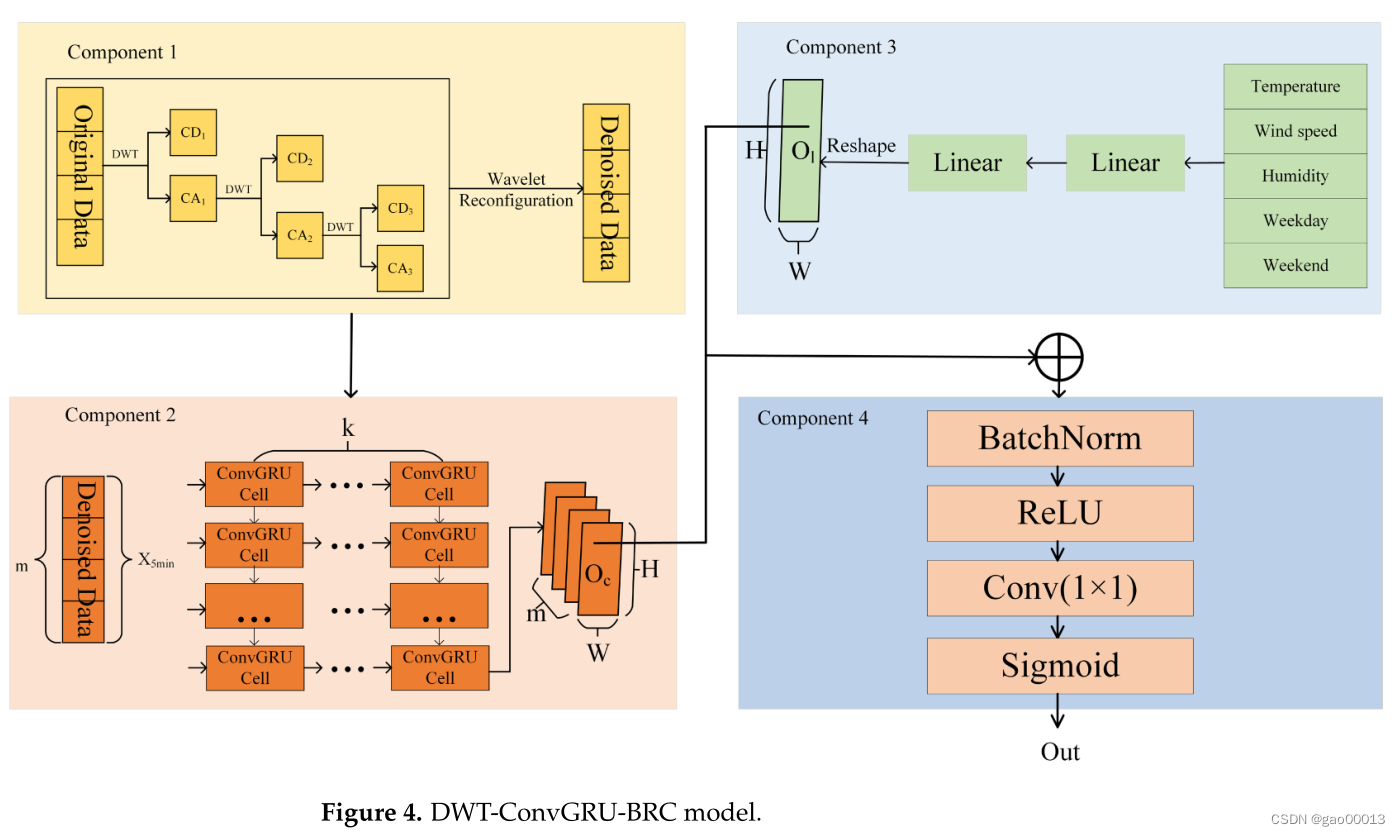
本文提供的DWT-ConvGRU-BRC模型由四个部分组成,分别是DWT部分、三个ConvGRU部分、元信息特征提取部分和BRC部分(图4)。第一个部分是DWT模块,该模块通过db3小波基函数对VPS数据进行降噪。第二个组件是ConvGRU模块。CNN可以很好地捕捉空间相关性,但不能很好地捕捉时间相关性。GRU和LSTM都能很好地模拟时间相关性,但GRU保持了预测精度,并且比LSTM运行速度慢。因此,将CNN和GRU整合形成一个三层的ConvGRU网络可以同时捕获时间和空间的相关性。第三个组件是包含温度、风等外部因素的两层线性层模块将速度、湿度、工作日和假期纳入模型,以提高长期预报的准确性。最后,利用BRC层进行特征融合,通过sigmoid函数进行预测。
3.2.1. 离散小波变换(DWT)去噪
在实际应用中获得的时间序列数据经常受到各种形式和程度的噪声的污染。离散小波变换非常适合于噪声滤波,这使其成为时间序列数据处理的良好选择[40]。当时间序列数据被DWT分解时,原始信号被分离为不同分辨率级别的近似系数和细节系数。原始信号的信息被保留在小波系数中,并且可以根据这些系数执行原始数据的完美重构。然而,表示数据中的详细运动的一些细节系数可以被识别为噪声。然后,可以在DWT重建过程之前将这些系数设置为零,以从原始时间序列中滤出噪声,并且重建包括从除噪声之外的每个分量重建时间序列。换句话说,DWT是基本小波的尺度和平移的离散化。DWT可以定义为:

其中是
的复共轭,公式
满足
,m和n是整数。
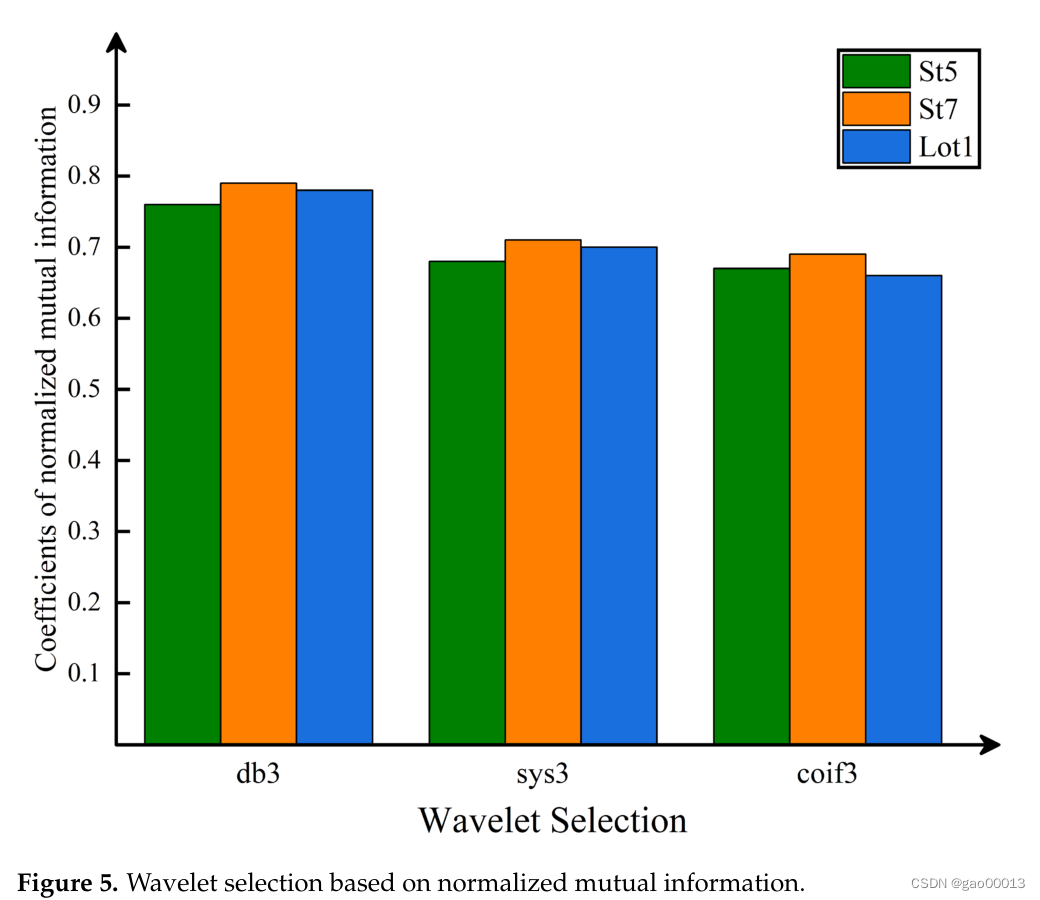
合适的小波基函数对于提取停车数据的特征非常重要。Kaplun等[41]在匹配追踪算法中基于熵估计选择合适的小波基函数。Bhavsar等[42]通过计算互信息的大小选择合适的小波基函数。在本文中,我们通过计算归一化值来度量两个变量之间的相关性互信息(NMI),将互信息置于[0,1]之间,便于选择合适的小波基函数。NMI定义为:

式中,H(X)和H(Y)分别表示变量X和Y的熵。H(X|Y)是给定Y的X的条件熵。
在本研究中,比较的小波的基本函数是Daubechies (db3), symlet (sym3)和coiflet (coif3)。从图5可以看出,相对于其他小波函数,db3的NMI最高。经过实验对比,选择db3小波基对实验时间序列进行小波分解,分解层次数为3,可以在尽可能保持时间序列数据波动特征的同时去噪
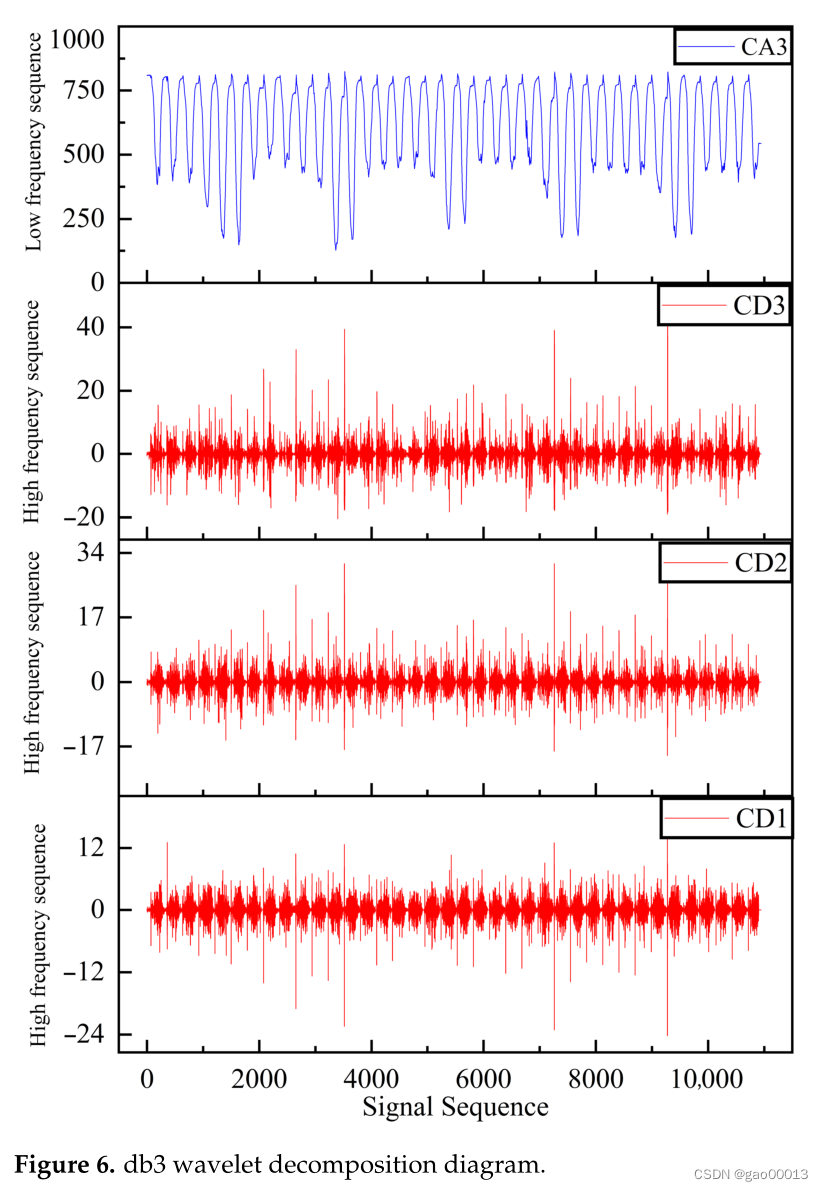
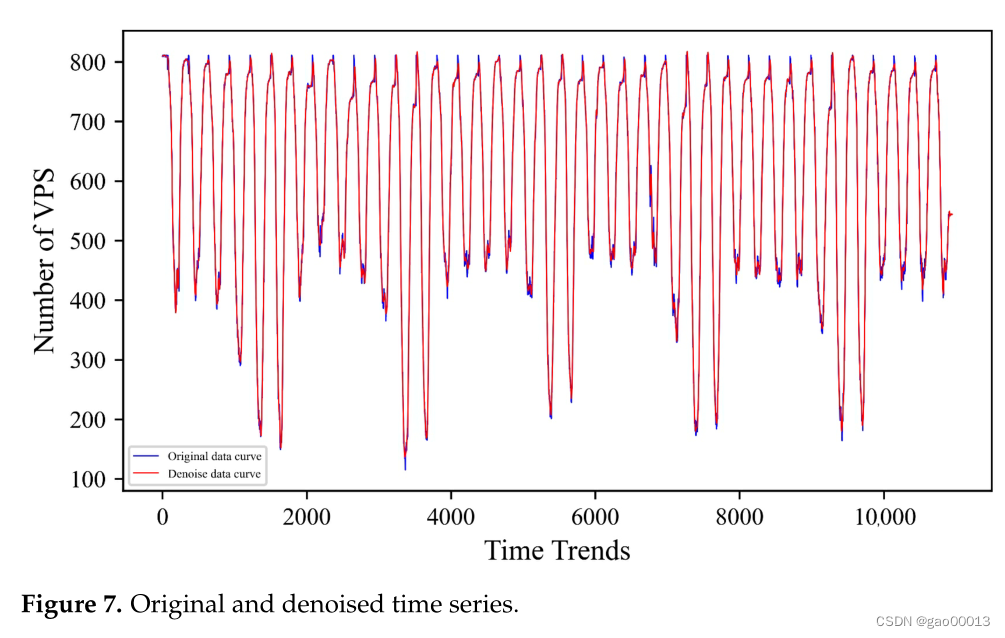
我们以St7停车场为例,展示DWT构件的具体过程。原始VPS数据及其分解组件如图6所示。红色为分解三次的高频序列,蓝色为低频序列。采用阈值法进行去噪,然后重构去噪后的时间序列。图7显示了原始数据和去噪数据的对比。我们可以看到,降噪后的数据整体规律性增强,趋势趋于平滑,更适合模型构建。如式(1)所示,去噪后的数据为。
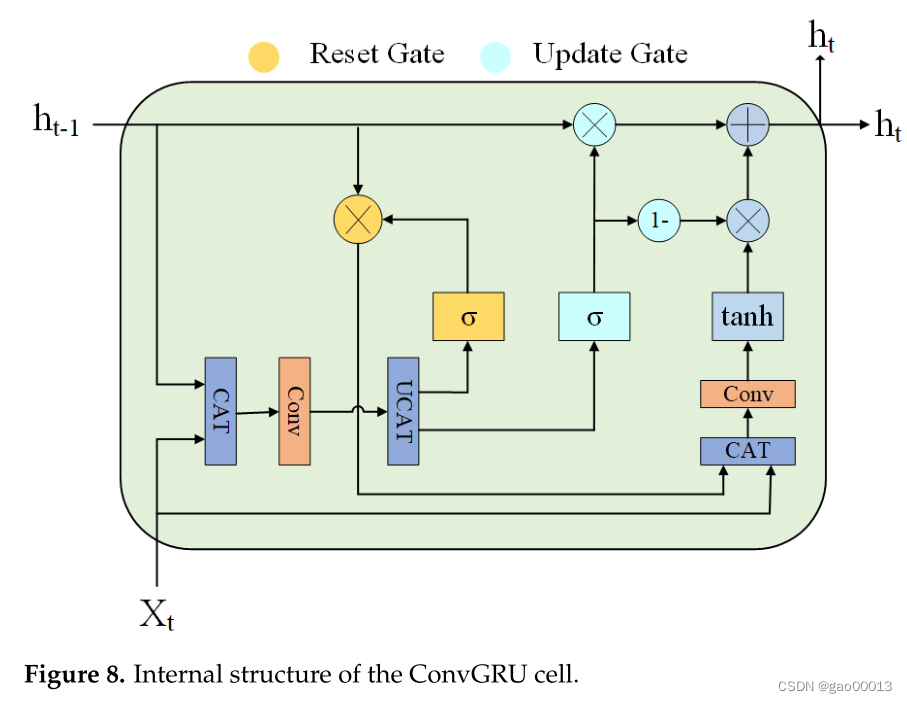
3.2.2. 卷积门控循环单元(ConvGRU)
ConvGRU和GRU之间的一个关键区别是前者使用卷积运算符而不是完全连接的运算符。因此,ConvGRU可以更好地捕捉时空相关性。图8显示了ConvGRU的内部结构单元格,其中CAT和UCAT分别表示连接和分割操作。ConvGRU的详细信息流如下式所示:
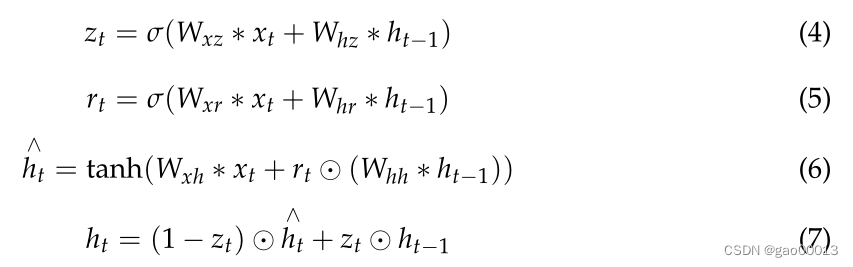
其中表示更新栅极,
表示复位栅极,
表示候选隐藏态。
表示当前步的输入,
和
分别表示当前步和前一步的隐藏状态。
和
分别是当前时间点的输入和输出向量,
,
和
是每个门的卷积核。此外,σ和tanh分别是s型和双曲型正切激活函数,∗是卷积运算,
为Hadamard乘积。
具体来说,给定(去噪数据)和
作为时间步长t的输入,该单元首先使用式(4)和式(5)分别获得更新门和复位门的输出。然后,使用式(6),可以计算时间隐藏状态
,该状态同时考虑输入Xt和前一个ConvGRU算子产生的隐藏状态
。单元的最终隐藏状态
是由时间隐藏状态
和前一个隐藏状态
的线性组合由式(7)产生的。我们将这部分的输出表示为:
![]()
其中m表示以5分钟为间隔的数据个数,⊕表示串联操作
3.2.3. 外部因素提取与特征学习
车位具有明显的周期性特征。我们分析了外部因素的影响,如工作日、非工作日、危险天气和正常天气,停车位的可用性。外部因素可以影响停车事件,是模型的重要组成部分。为了考虑外部因素对vps的影响,设计了两层线性层。我们将[43]收集的温度、风速、湿度等数据,以及工作日和非工作日作为本节的输入记录为n。将n代入式(9),得到

其中σ为激活函数,, i = 1, 2为第i个线性函数的权重和偏差。对于特征学习,我们通过重塑函数将得到的输出
转换为
三个convgru的输出和附加的因子提取组件连接在一起,表示为,并馈送到BRC层。BRC层是三个连续操作的复合函数,即批归一化(batch normalization, BN)、整流线性激活(rectified linear activation, ReLU)和1 × 1卷积(Conv)。我们使用BRC层实现特征的重用和传播。最后,利用s型函数进行预测。
4.实验结果
4.1.实验设置及评价指标
在我们的实验中,我们选择60%的数据作为训练集,20%作为验证集,剩下的作为测试集。我们使用公式(10)对去噪数据进行归一化,然后使用长度为10的单步移动窗口数据将其切片到模型中。对于训练,梯度下降优化算法为Adam[44]算法,学习率为0.01,损失函数为MAE, epoch大小为32,batch大小为32,ConvGRU层数(k)为3。据此预测5、15、30、45、60 min后的vps数。为避免偶然性,每个预测任务独立重复30次,取其平均值作为结果。DWT-ConvGRUBRC模型使用PyTorch 1.11.0版本实现,实验设备包括第12代intel (R) Core(TM) i5-12600KF处理器和16gb内存的NVIDIA GeForce GTX 30600Ti GPU

其中Max和min分别表示样本数据的最大值和最小值,Max - min表示范围。我们使用平均绝对误差(MAE)、平均绝对百分比误差(MAPE)和均方根误差(RMSE)来衡量预测值的准确性。所有三个评估指标的范围为[0,+∞),当预测值与真实值完全匹配时等于0,即完美模型;误差越大,值就越大。定义如式(11)-(13)所示。
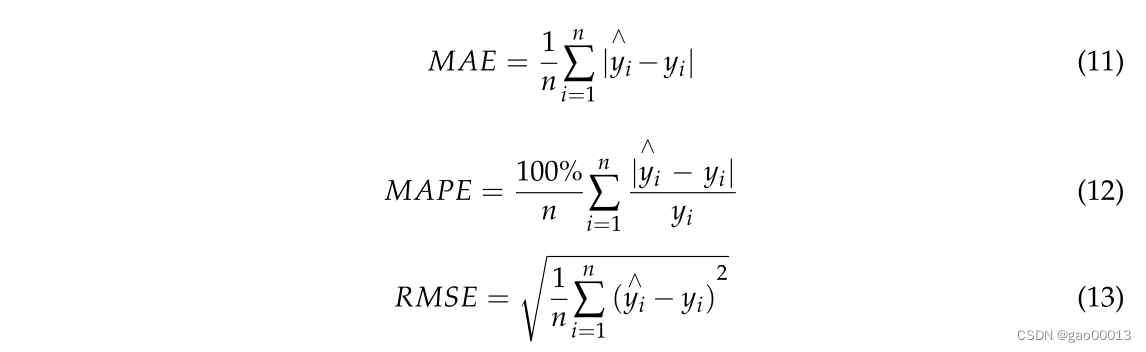
其中为实际的
,
为预测的
, n为时间步长
4.2. 结果与分析
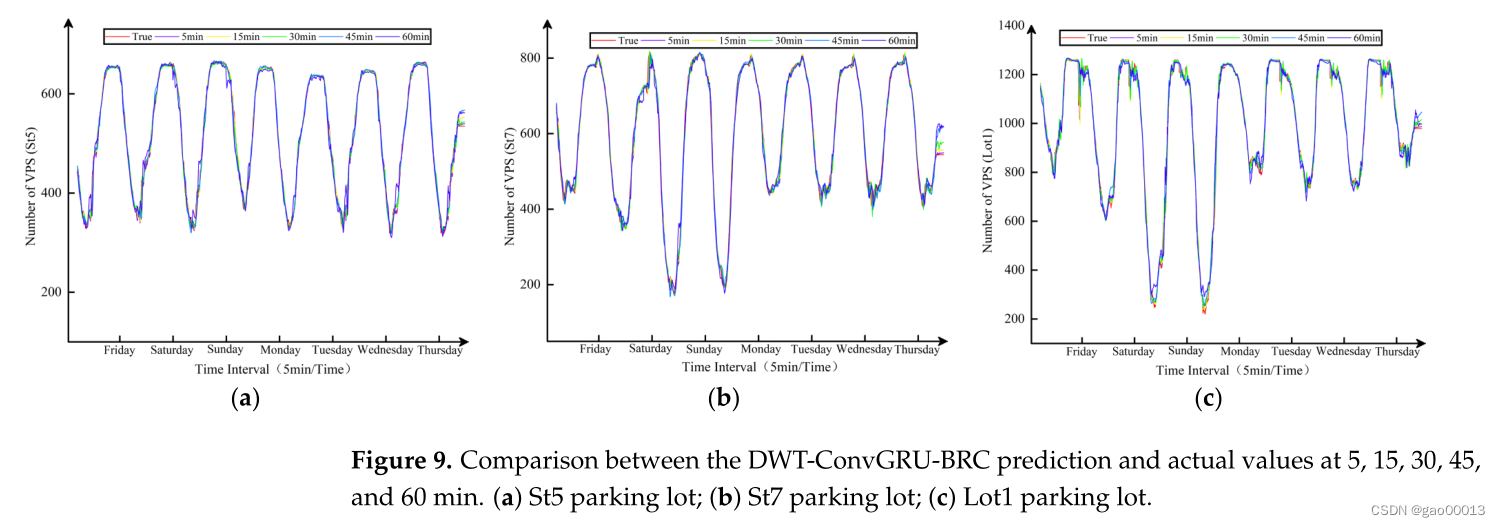
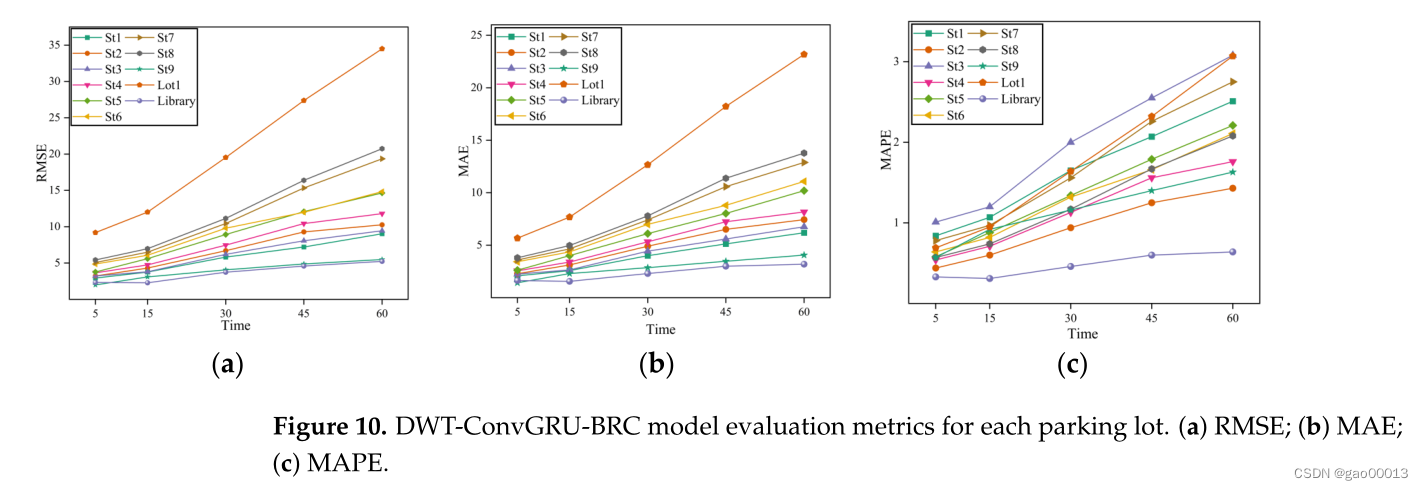
进行了50次实验,取平均值作为结果,以提高精度差异的统计显著性。表1显示了dwt - convru - brc模型的详细RMSE、MAE和MAPE数据。图9显示了DWT-ConvGRU-BRC模型在Lot1、St5和St7停车场中对5、15、30、45和60分钟VPS预测的效果,其中x轴表示时间间隔,y轴表示VPS数量。我们的模型在预测多个停车场vps的可用性方面具有鲁棒性。
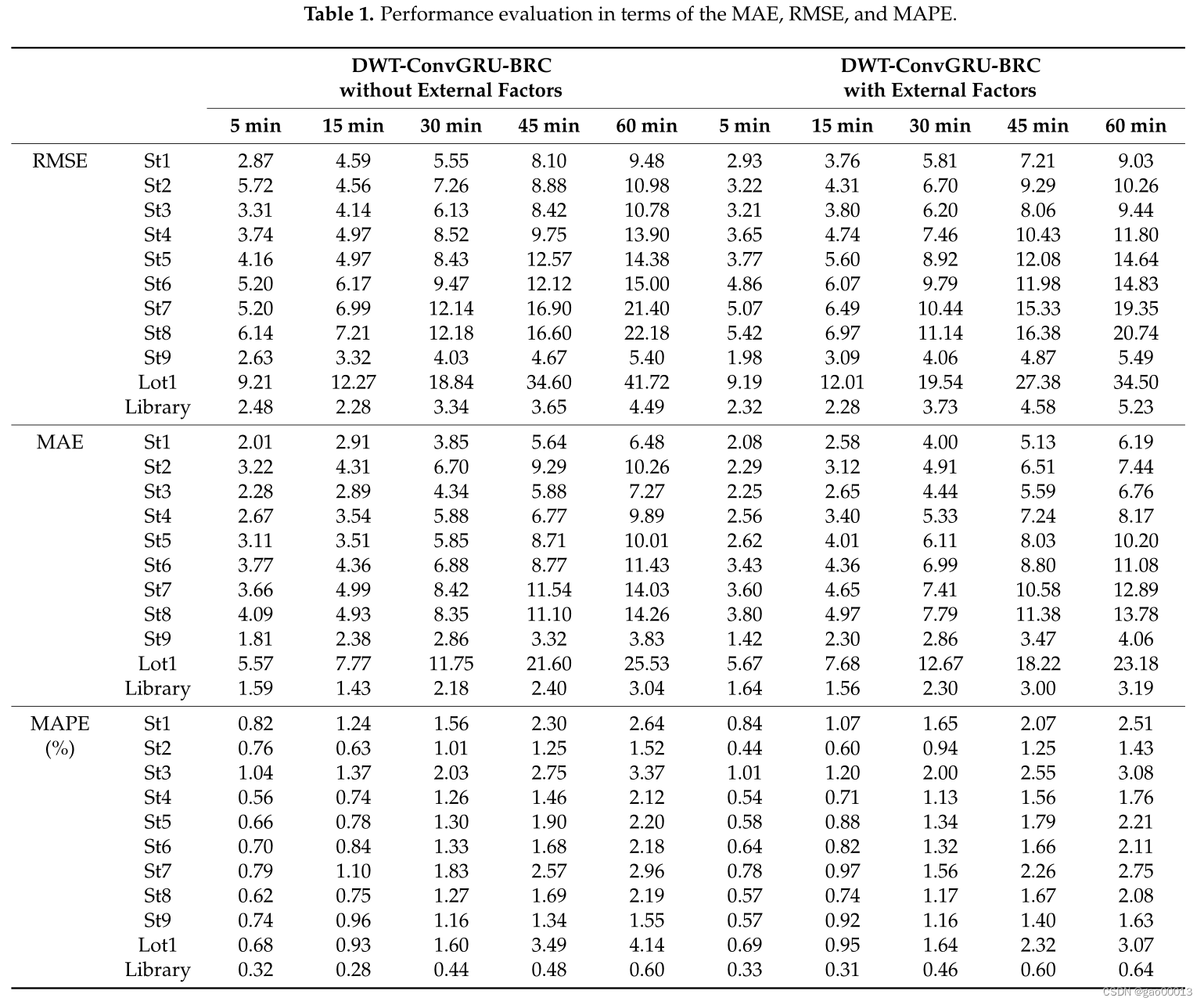
从第3节,我们得出停车占用受天气等外部因素影响的结论。这与文献[33 - 35,38,39]的结论是一致的。因此,我们在表1中进行消融实验,比较存在或不存在外部因素对VPS预测的影响。我们发现,包括温度、风速、工作日和周末等外部因素有利于提高预报的准确性。对于RMSE、MAE和MAPE,在55个预测任务中,有外部因素的预测模型分别在40个、35个和39个任务中优于无外部因素的预测模型。这表明考虑外部因素可以提高VPS预测的准确性,因此可以说外部因素具有显著性从第3节,我们得出停车占用受天气等外部因素影响的结论。这与文献[33 - 35,38,39]的结论是一致的。因此,我们在表1中进行消融实验,比较存在或不存在外部因素对VPS预测的影响。我们发现,包括温度、风速、工作日和周末等外部因素有利于提高预报的准确性。对于RMSE、MAE和MAPE,在55个预测任务中,有外部因素的预测模型分别在40个、35个和39个任务中优于无外部因素的预测模型。这表明考虑外部因素可以提高VPS预测的准确性,因此可以说外部因素具有显著性
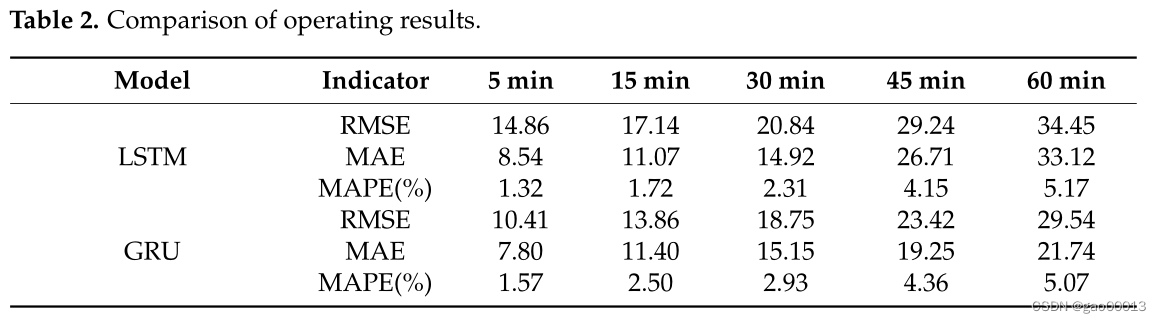
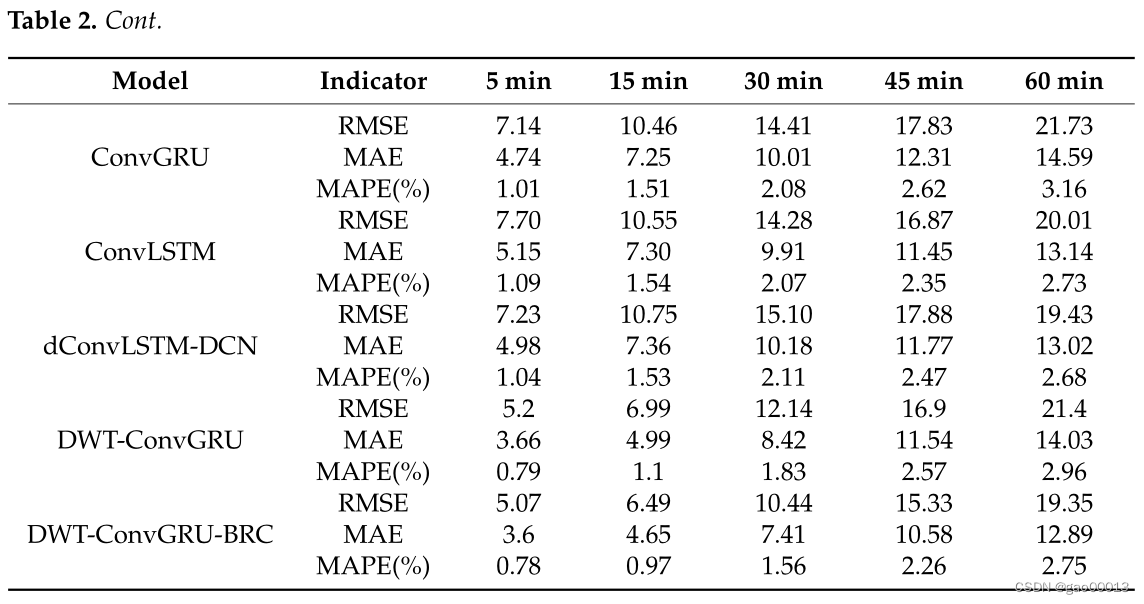
由于一些模型只能预测单个停车场,我们比较了这些模型在预测5、15、30、45和60 min时VPSs数量的有效性,并以St7停车场为例。LSTM和GRU模型可以有效地从非线性时间序列数据中提取时间信息,但未能考虑区域内停车场之间的空间相关性。在捕获时空相关性的同时,ConvGRU模型在运行速度方面优于ConvLSTM模型。小波降噪后,预报精度有明显提高,天气等外部因素提高了长期预报的精度。如表2所示,所提出的DWT-ConvGRU-BRC模型明显优于基准方法。
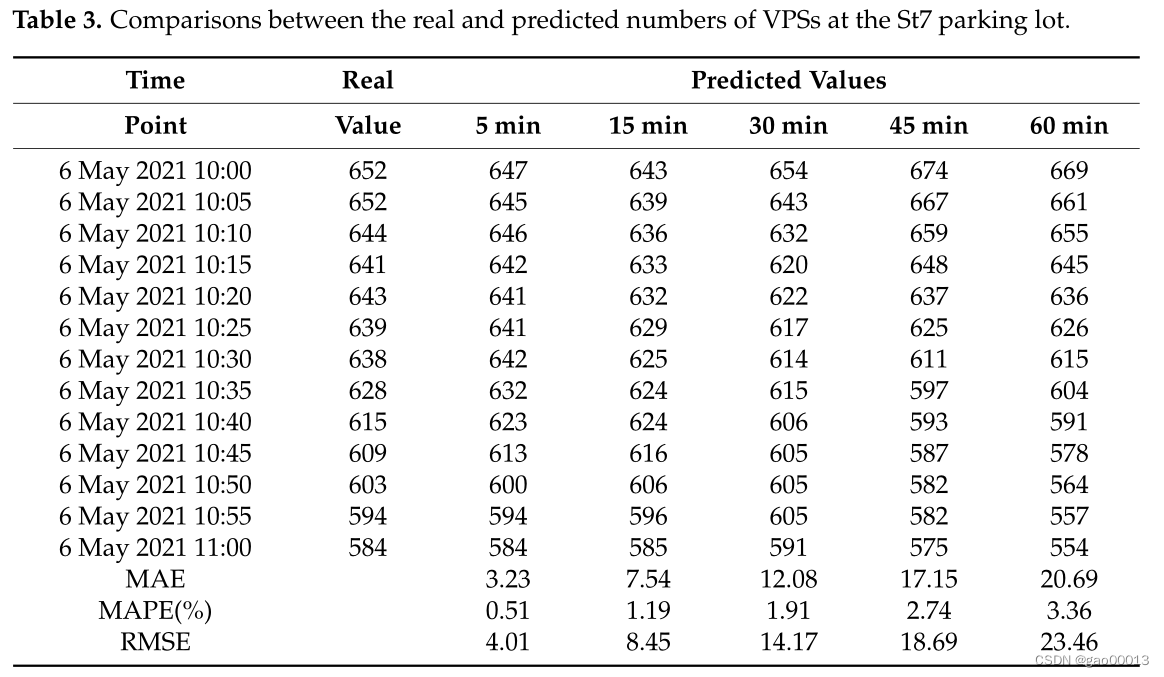
为了说明所提出的模型预测vps实际数量的能力,表3中,我们给出了所提出的DWT-ConvGRUBRC模型在2021年5月6日10:00 - 11:00输出的St7停车场vps的实际数量和预测数量的详细比较。我们还计算了这段时间内的MAE、MAPE和RMSE值。DWT-ConvGRU-BRC模型的输出值与实际值非常接近。
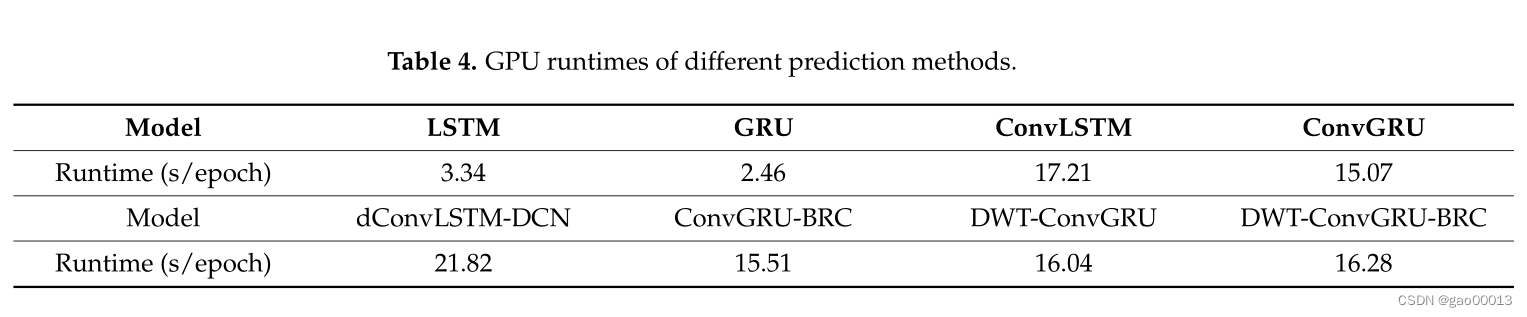
此外,模型性能评价应同时考虑预测精度和时间消耗。表4比较了LSTM、GRU、ConvGRU、ConvLSTM、dConvLSTM-DN、DWT-ConvGRU和DWT-ConvGRU- brc模型每轮的运行时间。DWT-ConvGRU-BRC模型考虑了小波降噪和外部因素等因素的影响,在运行速度上略逊于不考虑这些因素的模型,但与[36]中提出的dConvLSTM-DN模型相比,我们的模型在运行速度上有了明显的提升。综上所述,我们提出的模型不仅提高了预测的有效性,而且提高了运行速度。
5. 结论
提出了一种基于深度学习的多车位入住率预测模型。该模型结合DWT、ConvGRU和BRC三个模块,可以灵活地接受多个时空结构化数据源作为输入。以美国加利福尼亚州圣莫尼卡11个公共停车场为例,使用VPS数据、天气数据、工作日和周末数据,对模型的性能进行了评估。实验结果表明,我们的模型可以达到相当高的精度,短期预测的mape小于2%,长期预测的mape小于4%。DWT-ConvGRU-BRC模型显著优于基线LSTM和GRU方法。总的来说,我们发现使用DWT对VPS数据进行降噪可以提高预测精度,并且将天气信息与工作日和周末信息相结合可以提高停车占用率的长期预测性能。
车位预测是停车引导信息系统的重要组成部分。可用车位预测可以提高停车引导系统信息的有效性,帮助驾驶员规划行车路线,找到空闲车位。此外,如果我们有一个可靠的停车预测算法,我们可以应用动态停车定价来控制每个停车场的停车需求,从而辅助交通规划和管理,减少能源消耗和交通拥堵。在未来的工作中,我们将重点考虑其他外部影响,如POI信息、交通事件数据、交通流数据等,进一步提高适应性。同时,未来的研究还将考虑如何在保证预测精度的同时优化模型的运行时间。
这篇关于【多停车场车位预测】Prediction of Vacant Parking Spaces in Multiple Parking Lots:A DWT-ConvGRU-BRC Model的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!