本文主要是介绍ORB-SLAM2 技术详解(3)-- 源码编译及TUM RGB-D数据集测试,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
0. 摘要
1. ORB-SLAM2 简介
2. 安装依赖库
(1)安装Pangolin
(2)安装必要的依赖库
(3)安装OpenCV
(4)安装Eigen
(5)安装BLAS and LAPACK库
(1) BLAS: Basic Linear Algebra Subprograms
(2) LAPACK:Linear Algebra PACKage
3. 编译OEB_SLAM
4. 运行测试程序
4.1 TUM数据集格式简介:官网介绍https://vision.in.tum.de/data/datasets/rgbd-dataset/file_formats
4.2. RGB-D 测试实例, 按照要求下载数据集
4.3.TMU下载associate.py.
4.4.打开终端,进入到associate.py所在目录,
4.5 运行测试数据集效果
4.6 evo分析工具,orghttps://github.com/MichaelGrupp/evo/wiki/Plotting
0. 摘要
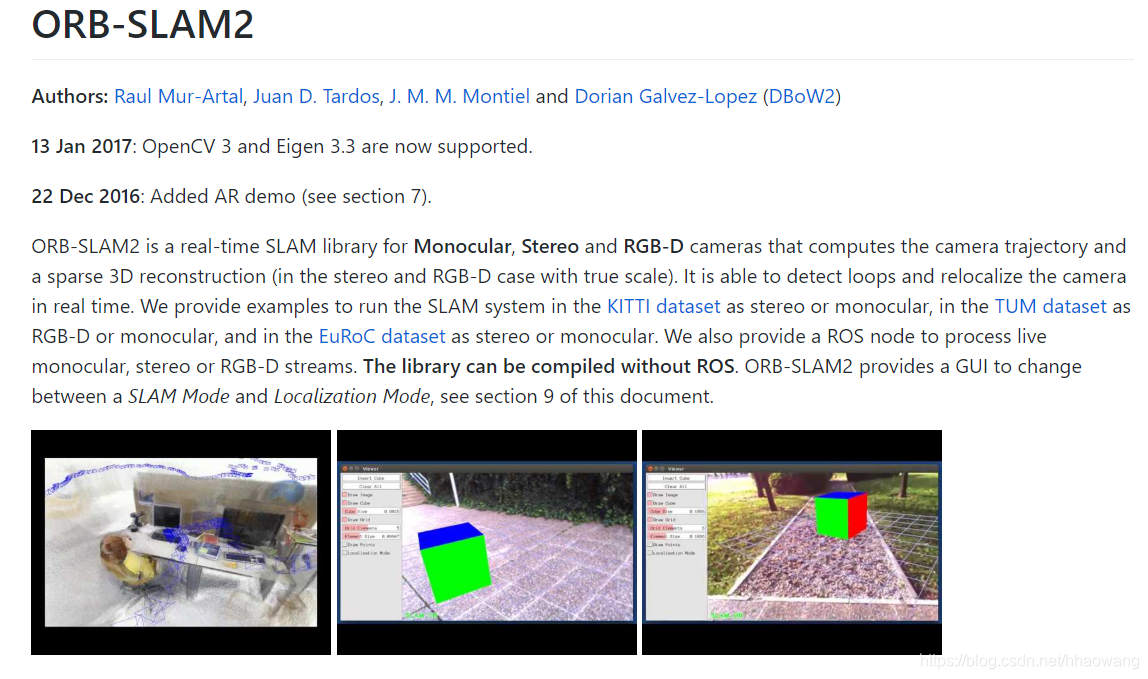
近段时间一直在学习高翔博士的《视觉SLAM十四讲》,学了以后发现自己欠缺的东西实在太多,好多都需要深入系统的学习。ORB-SLAM2是一套完整的SLAM方案,提供了单目,双目和RGB-D三种接口。它能够实现地图重用,回环检测和重新定位的功能。无论是在室内的小型手持设备,还是到工厂环境的无人机和城市里驾驶的汽车,ORB-SLAM2都能够在标准的CPU上进行实时工作。
ORB-SLAM2在后端上采用的是基于单目和双目的光束法平差优化(BA)的方式,这个方法允许米制比例尺的轨迹精确度评估。此外,ORB-SLAM2包含一个轻量级的定位模式,该模式能够在允许零点漂移的条件下,利用视觉里程计来追踪未建图的区域并且匹配特征点。 可以说,ORB_SLAM2是近几年SLAM的集大成者,它吸收了近几年monoslam领域的很多理论成果,比如逆深度的使用,g2o工具箱的优化等。而且以orb特征贯穿始终,从一开始的特征处理,匹配,以及用于回环的bag-of-words,词典,全用的是orb。缺点在于它的的建图部分只含有稀疏的map point,这不仅让最终建的图很难看,而且对于机器人下一步的应用会造成很大困难。
文章主要对ORB-SLAM2进行编译运行。以及下载TUM上的数据集。然后跑自己的数据集,以及利用笔记本摄像头进行测试。
1. ORB-SLAM2 简介
源码github地址:https://github.com/raulmur/ORB_SLAM2
2. 安装依赖库
参考:ORB_SLAM2功能包的构建和在ROS中的应用 - 简书
(1)安装Pangolin
使用git命令进行下载 git clone https://github.com/stevenlovegrove/Pangolin.gitcd Pangolin
终端里输入:
mkdir pangolin
cd pangolin
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake ..
cmake --build .(2)安装必要的依赖库
a、GLEW:
sudo apt-getinstall libglew-dev
b、Boost:
sudo apt-getinstall libboost-devlibboost-thread-devlibboost-filesystem-dev
c、Python2/Python3:
sudo apt-getinstall libpython2.7-dev
d、编译基础库
sudo apt-getinstall build-essential
(3)安装OpenCV
安装依赖:
a、编译器相关:
sudo apt-getinstall build-essential
b、必须依赖:
sudo apt-getinstall cmake git libgtk2.0-devpkg-config libavcodec-dev libavformat-dev libswscale-dev
c、可选安装:
sudo apt-getinstall python-devpython-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
安装OpenCV:
a、官网下载OpenCV 3.x.x forLinux下载地址,解压到Ubuntu中
b、进入OpenCV文件夹,配置工程
mkdir release
cd release
cmake -D CMAKE_BUILD_TYPE=RELEASE-D CMAKE_INSTALL_PREFIX=/usr/local .. -D BUILD_TIFF=ON
c、编译
make
sudo make install
(4)安装Eigen 和 g2o
下载Eigen下载地址,进入到在解压后的Eigen文件夹(例如eigen-eigen-07105f7124f9)下
编译:
mkdir buildcd buildcmake ..安装:
makesudo make install编译安装方法类似
mkdir buildcd buildcmake ..注意:Eigen默认安装路径为/usr/local/include/eigen3/Eigen, 而实际使用的查找路径为/usr/inlcude/eigen3/Eigen,因此需要将两个地址做链接
sudo ln -s /usr/local/include/eigen3 /usr/include/eigen3再次编译项目测试通过
参考ubuntu16.04+eigen3安装 - 灰色的石头 - 博客园Eigen库安装指南(两种方式)1、apt-get方式(假设默认安装到/usr/local/include里(可在终端中输入locate eigen3查看位置),若实际中默认安装到了/usr/incl
https://www.cnblogs.com/newneul/p/8256803.html
(5)安装BLAS and LAPACK库
sudo apt-getinstall libblas-dev
sudo apt-getinstall liblapack-dev
g2o需要BLAS和LAPACK
(1) BLAS: Basic Linear Algebra Subprograms
提供了基本的向量和矩阵操作:
- Level-1 BLAS: 支持 标量、向量、向量-向量 操作
- Level-2 BLAS: 支持 矩阵-向量 操作
- Level-3 BLAS: 支持 矩阵-矩阵 操作
(2) LAPACK:Linear Algebra PACKage
它调用BLAS来实现更高级的功能,支持以下操作:
- 解线性方程组
- 线性方程组的最小二乘解
- 特征值问题和奇异值问题
- 矩阵分解 (LU, Cholesky, QR, SVD, Schur, generalized Schur)
- 支持密集和带状矩阵,但不支持一般的稀疏矩阵
- 支持单精度和双精
DBoW2 and g2o (Included in Thirdparty folder)
ORB_SLAM2使用修改版的DBoW2 库进行位置识别 ,使用 g2o 库进行非线性优化. 这两个修改版的库被放在第三方文件夹内.
总的对于 opencv 和 eigen3,可以简单的用一行命令来解决:
sudo apt-get install libopencv-dev libeigen3-dev libqt4-dev qt4-qmake libqglviewer-dev libsuitesparse-dev libcxsparse3.1.2 libcholmod-dev 其中一部分是 g2o 的依赖项,不用太在意它的具体内容。至此,应该可以顺利编译 ORB-SLAM2 了
3. 编译OEB_SLAM
编译ORB_SLAM2库和例子程序(单目、双目和RGB-D)
cd ORB_SLAM2 chmod +x build.sh ./build.sh 生成的libORB_SLAM2.so位于lib目录下,可执行程序mono_tum, mono_kitti, rgbd_tum, stereo_kitti, mono_euroc and stereo_euroc位于Examples目录下。

到这里,如果小伙伴们不使用ROS的话,ORB_SLAM2其实已经可以正常使用了。但是如果要使用ROS的话,还要有几个步骤,第一个在~/.bashec中添加环境。
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM2/Examples/ROS编译对应的ROS文件
chmod +x build_ros.sh./build_ros.sh这样ORB_SLAM2其实已经全部编译好了。
注意:编译期间可能遇到各种错误,请查看本人博客总结:ORB_SLAM2编译debug 小结_Techblog of HaoWANG-CSDN博客
4. 运行测试程序
参考:ORB-SLAM2编译安装和USB摄像头例程运行 - 简书 ORB-SLAM2编译安装和USB摄像头例程运行
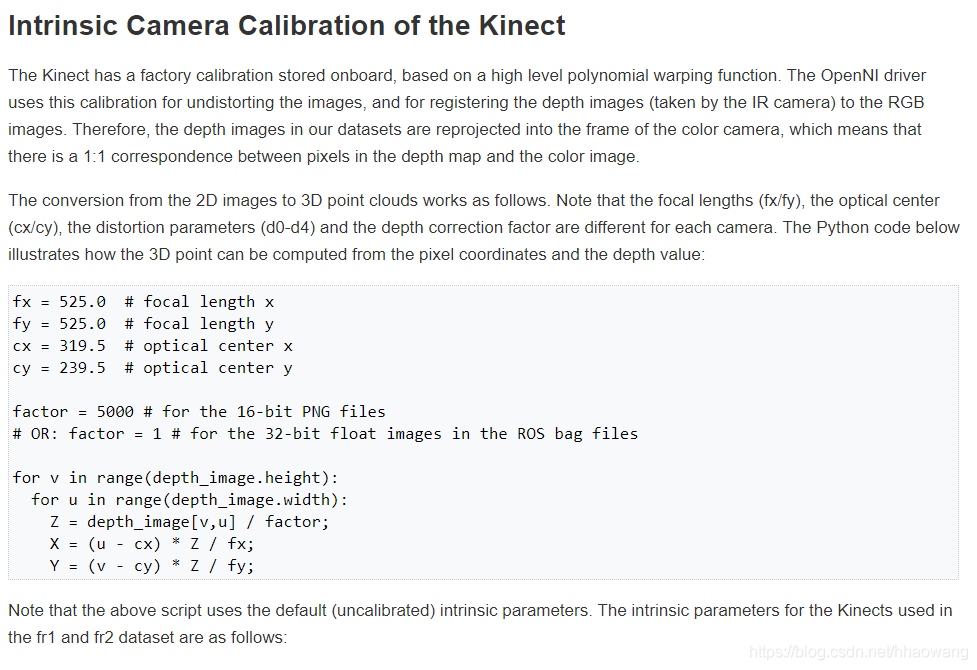
4.1 TUM数据集格式简介:官网介绍Computer Vision Group - File Formats
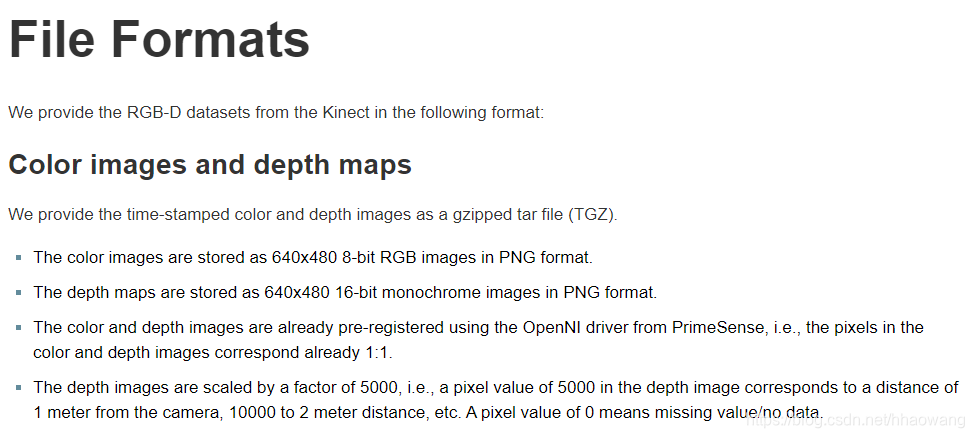
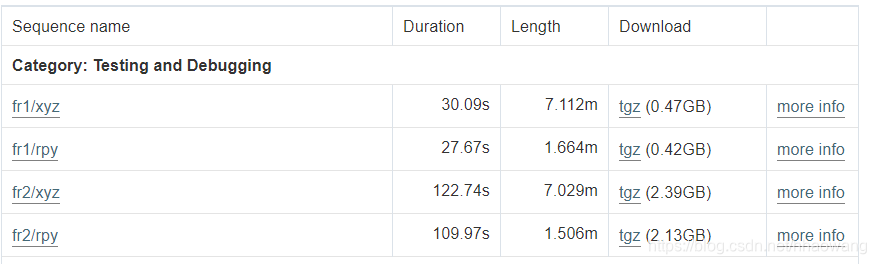
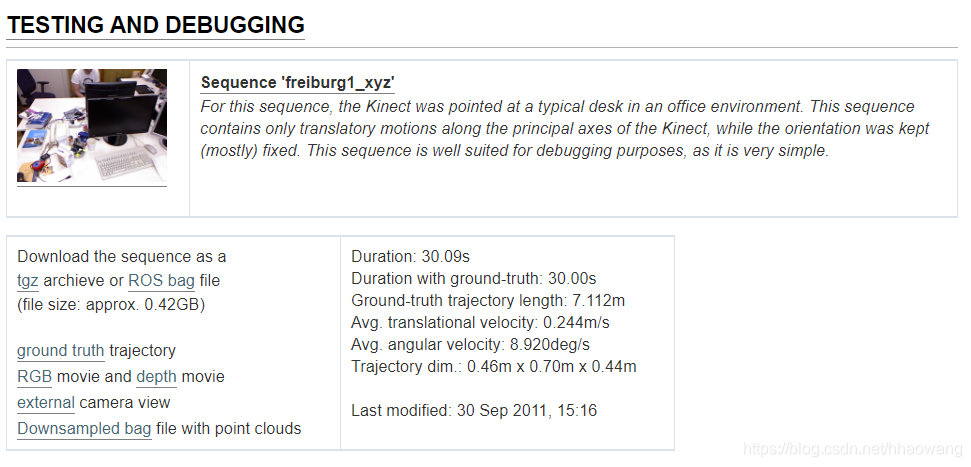
4.2. RGB-D 测试实例, 按照要求下载数据集
TMU Computer Vision Group - Useful tools for the RGB-D benchmark,下载的是fr1/xyz,将其解压到你喜欢的目录.我放在了~/TUM目录下面
4.3.TMU下载associate.py.
放在~/TUM数据集目录下面.
4.4.打开终端,进入到associate.py所在目录,
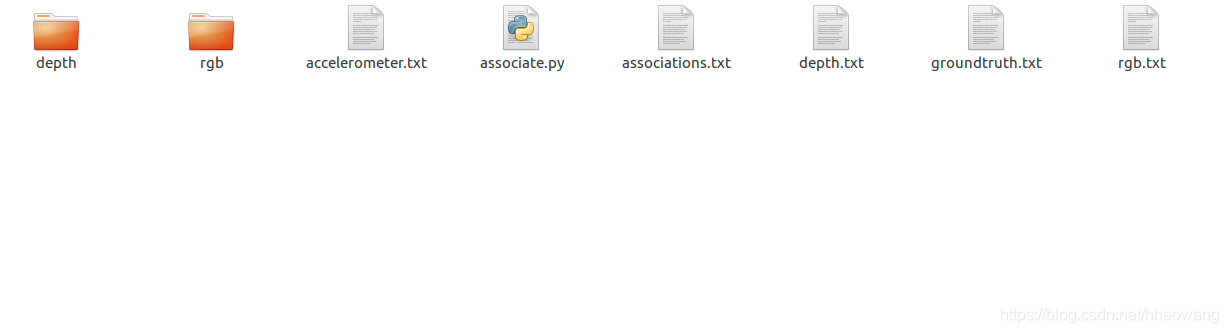
即~/TUM/rgbd_dataset_freiburg1_xyz,之后运行
python associate.py PATH_TO_SEQUENCE/rgb.txt PATH_TO_SEQUENCE/depth.txt > associations.txt
这里的PATH_TO_SEQUENCE 是指的下载数据集的目录~/TUM/rgbd_dataset_freiburg1_xyz里面有depth.txt 和 rgb.txt,将其替换至你的文件目录。
运行之后在该目录中将会生成一个associations.txt文件.
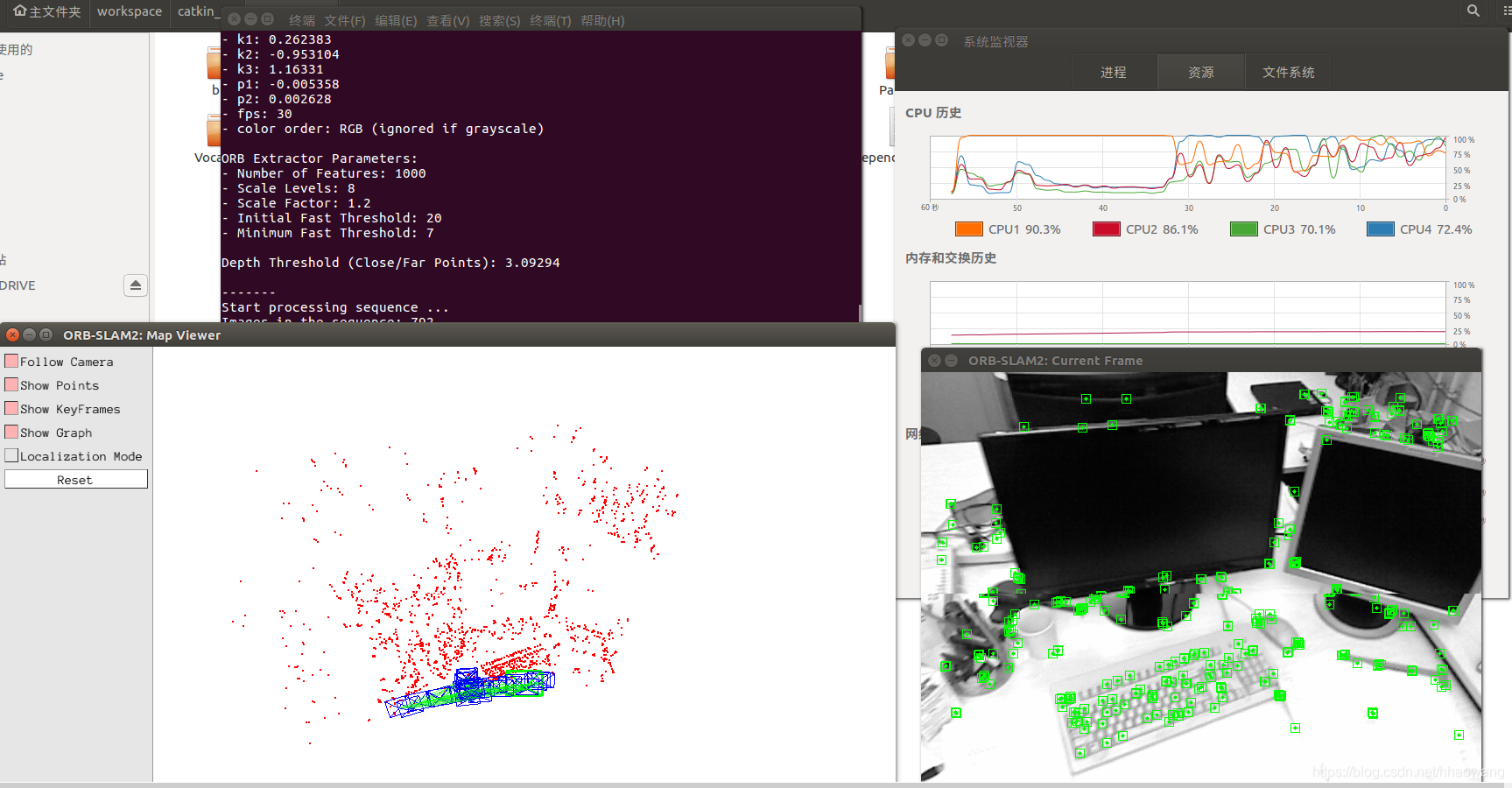
4.5 运行测试数据集效果
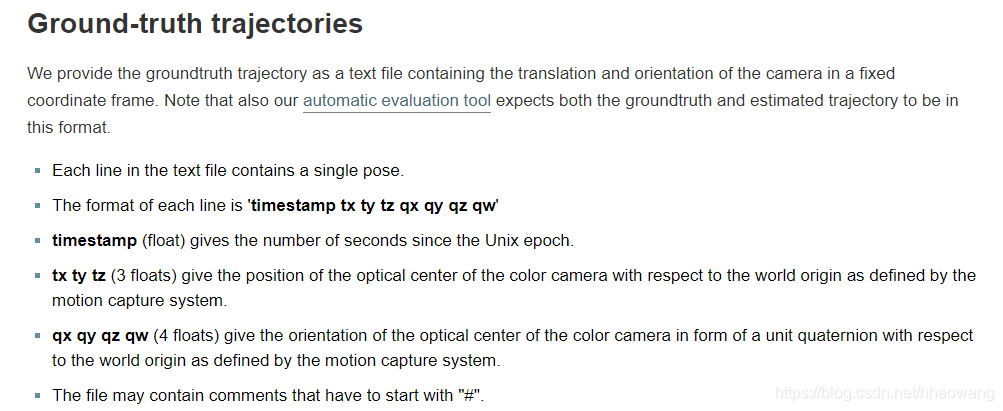
4.6 evo分析工具,orghttps://github.com/MichaelGrupp/evo/wiki/Plotting
evo可以评估两条轨迹的误差,主要有两个命令:
evo_ape:计算绝对位姿误差(absolute pose error),用于整体评估整条轨迹的全局一致性;
evo_rpe:计算相对位姿误差(relative pose error),用于评价轨迹局部的准确性。
这两个指令也支持evo_traj的可选参数,轨迹对齐-a与尺度缩放-s。完整指令如下:
evo_ape tum realTraj.txt estTraj.txt -a –s

这篇关于ORB-SLAM2 技术详解(3)-- 源码编译及TUM RGB-D数据集测试的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






