本文主要是介绍观察级水下机器人使用系列之四二维前视声纳,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文主要讲观察级水下机器人Valor配套的二维前视声纳,它与超短基线定位、摄像头都是水下机器人导航的重要部件。二维声纳是Tritech公司生产的,型号为Gemini 720is。
编辑
Gemini 720is主要技术参数见下表。

Gemini 720is通过一条蓝色的缆与机器人的电子舱USP9连接。

水下机器人的控制软件GSS能显示二维声纳的图像。
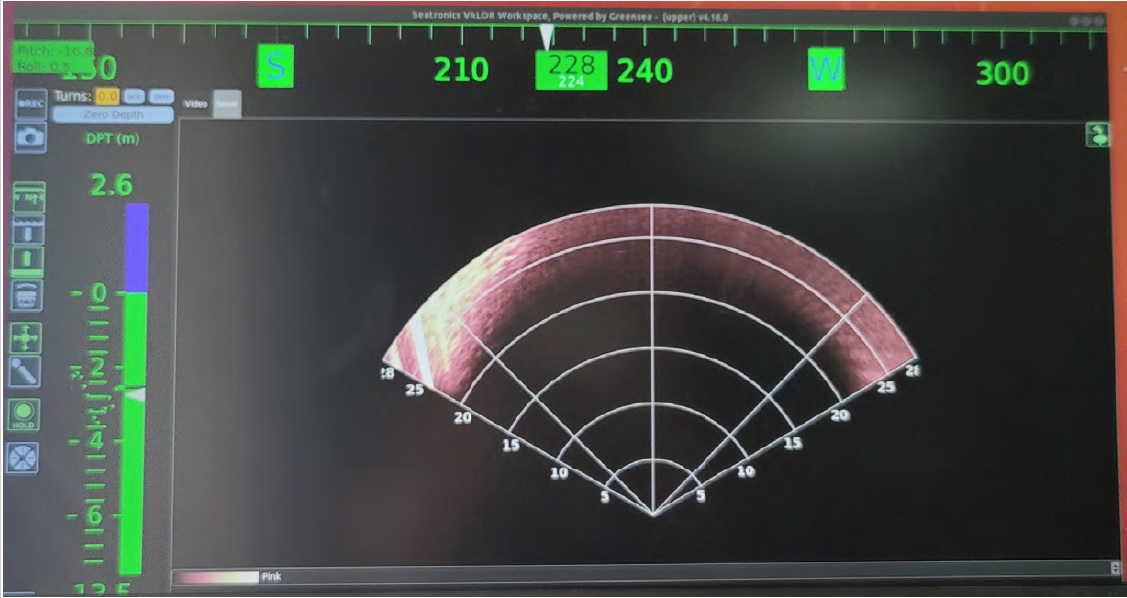
前视声纳属于主动声纳的一种,不仅可以探测海中的状况,还可以对目标进行定位,判断目标的大小以及形状信息。不像侧扫声纳和多波束等下视声纳等安装在船底,它一般安装在船舶或者水下机器人的前端。对于水下工作的机器人来说,前视声纳就相当于它的眼睛,不仅起到避障的作用,而且能对感兴趣目标进行跟踪。
二维声纳接收的是海底物体反射回的声波,原始的声纳信号只有方向信息和强弱信息。我们把返回声波的强弱与图像的灰度值对应起来,然后将灰度图像伪彩色化,使声纳图像更加贴近海中的真实情景。下面是灰度图和伪彩色图。
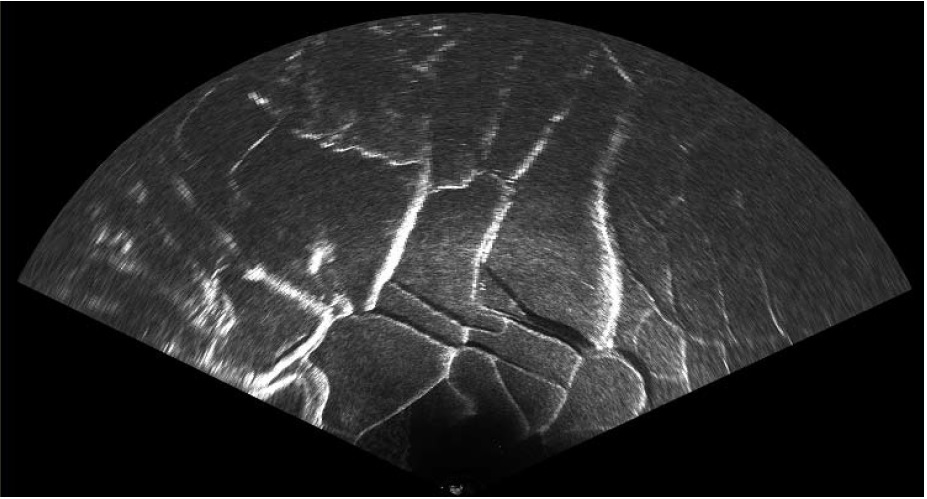
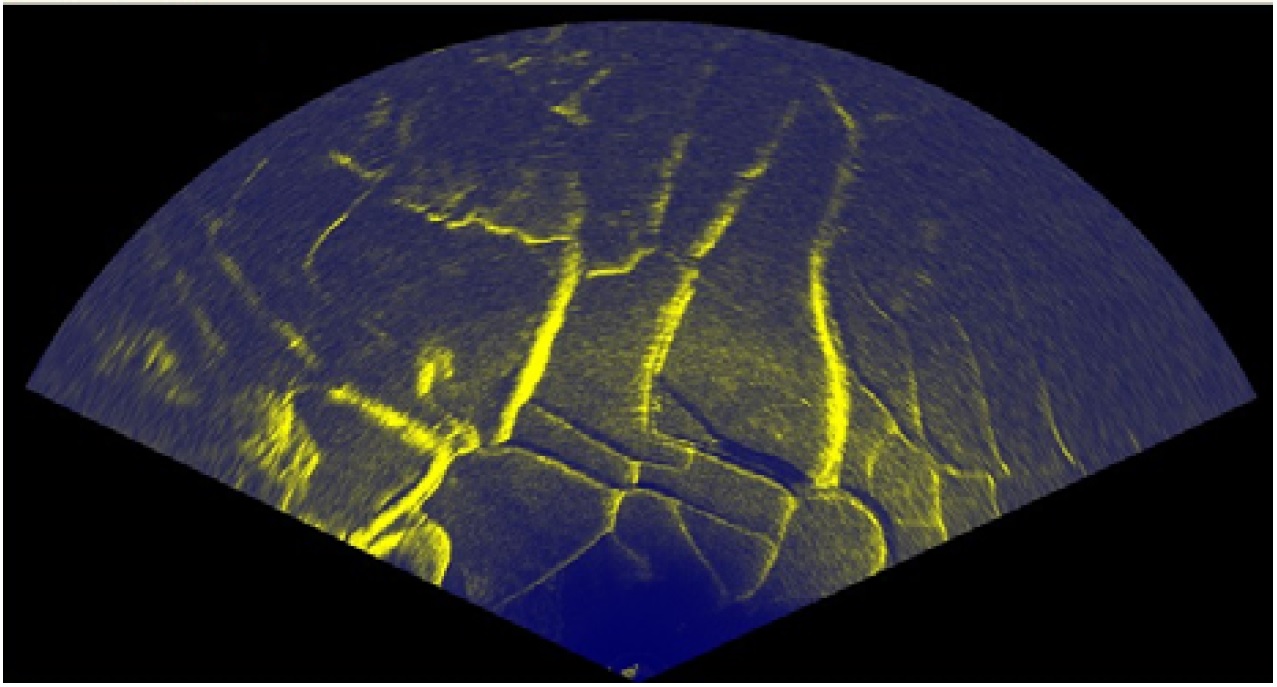
由于是向前照射,二维前视声纳的目标影子很小或者根本就不存在影子,因此,不能像侧扫声纳那样靠阴影来分辨目标物,而是通过目标亮和背景暗的鲜明特征分割图像来检测目标。

基于INS_前视声纳组合的输水隧洞AUV巡检定位方法_杨文果
目前,国内对于输水隧洞的检测主要有人工检测和水下机器人检测两类。水下环境的隐秘与恶劣,会对潜水员的人身安全构成威胁,且人工检测效率较低,因此,利用自主水下潜航器(Autonomous Underwater Vehicle,AUV)进行自动巡检是未来输水隧洞检测的主流发展趋势。
由于水下光线昏暗以及水质混浊等问题,基于光学原理的相机难以在水下进行远距离成像,目前用于水下成像的设备通常是各类声纳产品。其中,前视声纳主要用于水下机器人前方范围的感知和成像。
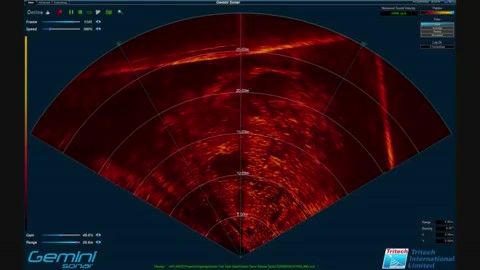
AUV导航定位主要采用惯性导航系统/多普勒测速仪(INS/DVL)组合导航的方式。DVL(用于隧洞)与前视声纳含有相同的频率成分,且输水隧洞内空间狭小,其发射的声波经隧洞壁来回反射后,有不少会被声纳换能器接收,在图像中形成噪声干扰,使得前视声纳对隧洞故障的感知变得困难。图1和图2分别是未受/受DVL干扰的声纳图像,图中两边的亮条是隧道壁,蓝色虚线是接线缝。
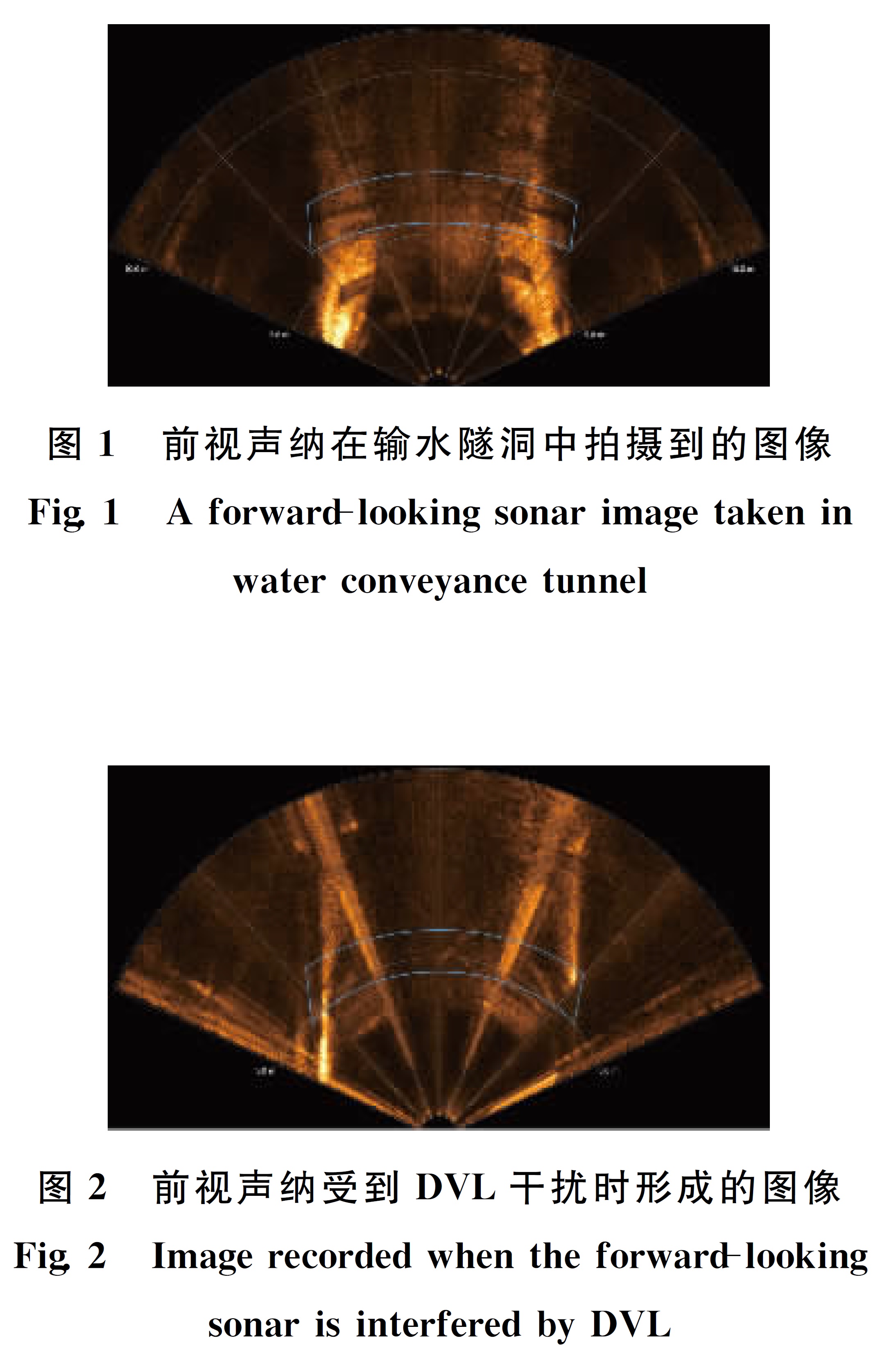
在受干扰严重的图2中,除了隧洞壁边缘(两条竖直亮斑)可以辨析出来,其他的图像细节大都湮没在噪声之中。图中蓝线框出的区域为接缝线所在位置,由于噪声污染已变得非常模糊。而且在不同的图像帧之间,噪声斑千变万化,时大时小,时而出现时而消失,没有规律可循。
文中提出一种IMU和前视声纳组合导航的方法,通过在相邻声纳图像帧间进行特征提取和匹配,根据惯导信息约束以及随机抽样一致(RANSAC)算法,剔除明显的误匹配点对,而后从剩下的配对点中解算出载体速度并与惯导信息进行组合。
实验测试在南水北调工程中穿黄隧洞内。经实际的输水隧洞测试,验证了其具有较高精度,能发挥和INS/DVL组合相接近的作用,具有实际应用价值。文中INS/前视声纳组合定位的方法在估算特征点仰角时,对水底进行了局部平面假设,如果隧洞横截面为弧形,这种假设只对弧形底部小范围内的特征点近似成立,如果大范围使用,需要进一步引入弧形底面的几何约束。
参考文献
基于INS_前视声纳组合的输水隧洞AUV巡检定位方法_杨文果
基于二维前视声纳成像的海底三维目标重建研究_徐梦雪
前视声纳图像目标跟踪系统研究_寇贤聪
这篇关于观察级水下机器人使用系列之四二维前视声纳的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






