声纳专题
【复现】jake 3991/sonar-SLAM:用于多波束声纳机器人的水下SLAM
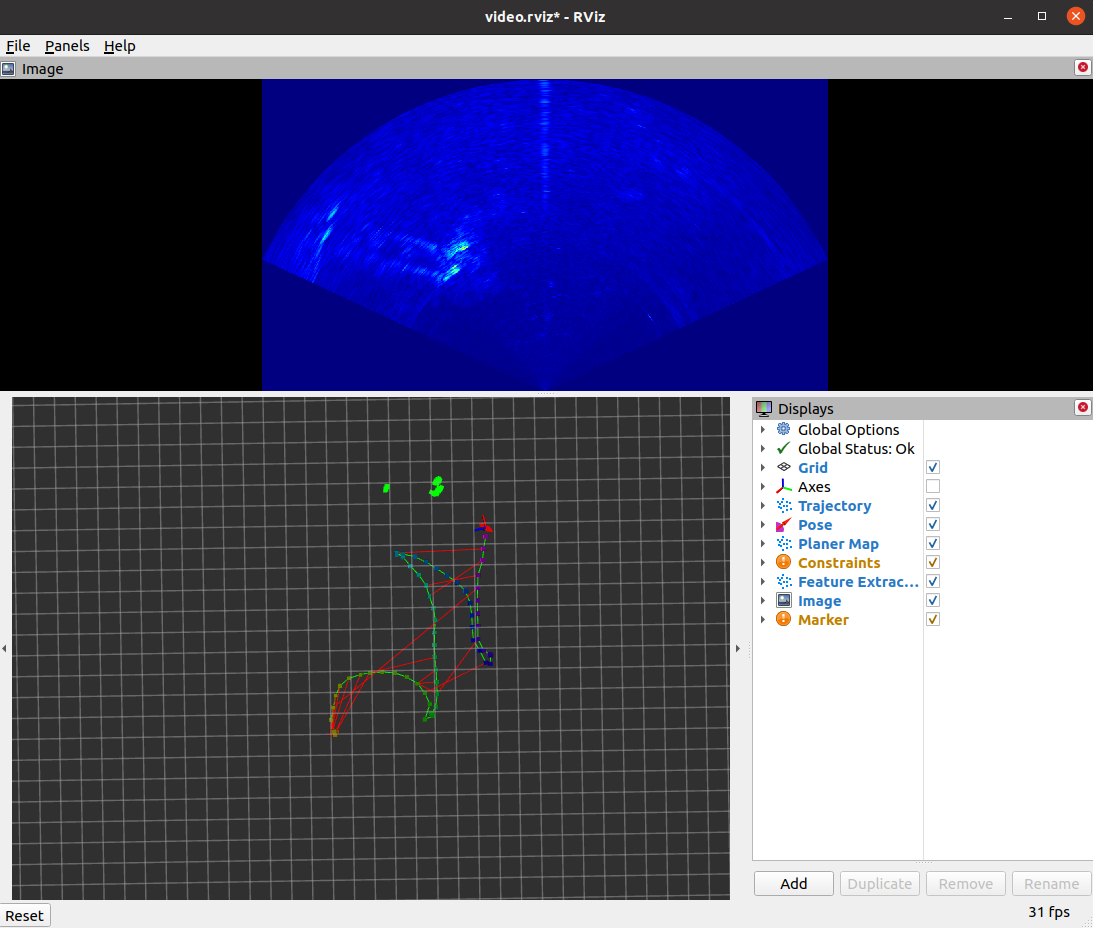
复现 jake 3991/sonar-SLAM:用于多波束声纳机器人的水下SLAM 前言一、sonar-SLAM 过程1.python环境2.ros环境3.安装4.数据5.在线运行报错1:No module named 'bruce_slam'报错2:No module named 'ros_numpy'报错3:No module named 'sklearn'报错4:AttributeEr


(1)(1.10) JSN-SR04T声纳
文章目录 前言 1 连接到自动驾驶仪 2 参数说明 前言 JSN-SR04T 是一种超声波距离传感器。有两个版本 v2.0 和 v3.0。v2.0 的作用范围为 25 至 450cm,v3.0 的作用范围为 20 至 600cm。也更稳定。由于量程很短,因此使用范围有限。 1 连接到自动驾驶仪 设置为第一个测距仪。设置参数后重新启动: RNGFND1_MAX_C

使用Arduino开发板和声纳传感器测量距离
声纳的主要用途是能够“看到”水下的物体。它使用声波来检测物体。由于声波在水中的传播比在空气中传播得更远,因此声纳比其他类型的传感器(如雷达)更受欢迎。虽然声纳首选用于水下,但它仍然可以在空气中使用;不过,在测量距离时我们可能会遇到一些很小的干扰。 声纳有两种类型:被动声纳和主动声纳。主动声纳有一个发射器和一个探测器:根据信号返回声纳所需的时间,它可以探测物体的范围或距离及其方向。它还检测信号的强
观察级水下机器人使用系列之四二维前视声纳
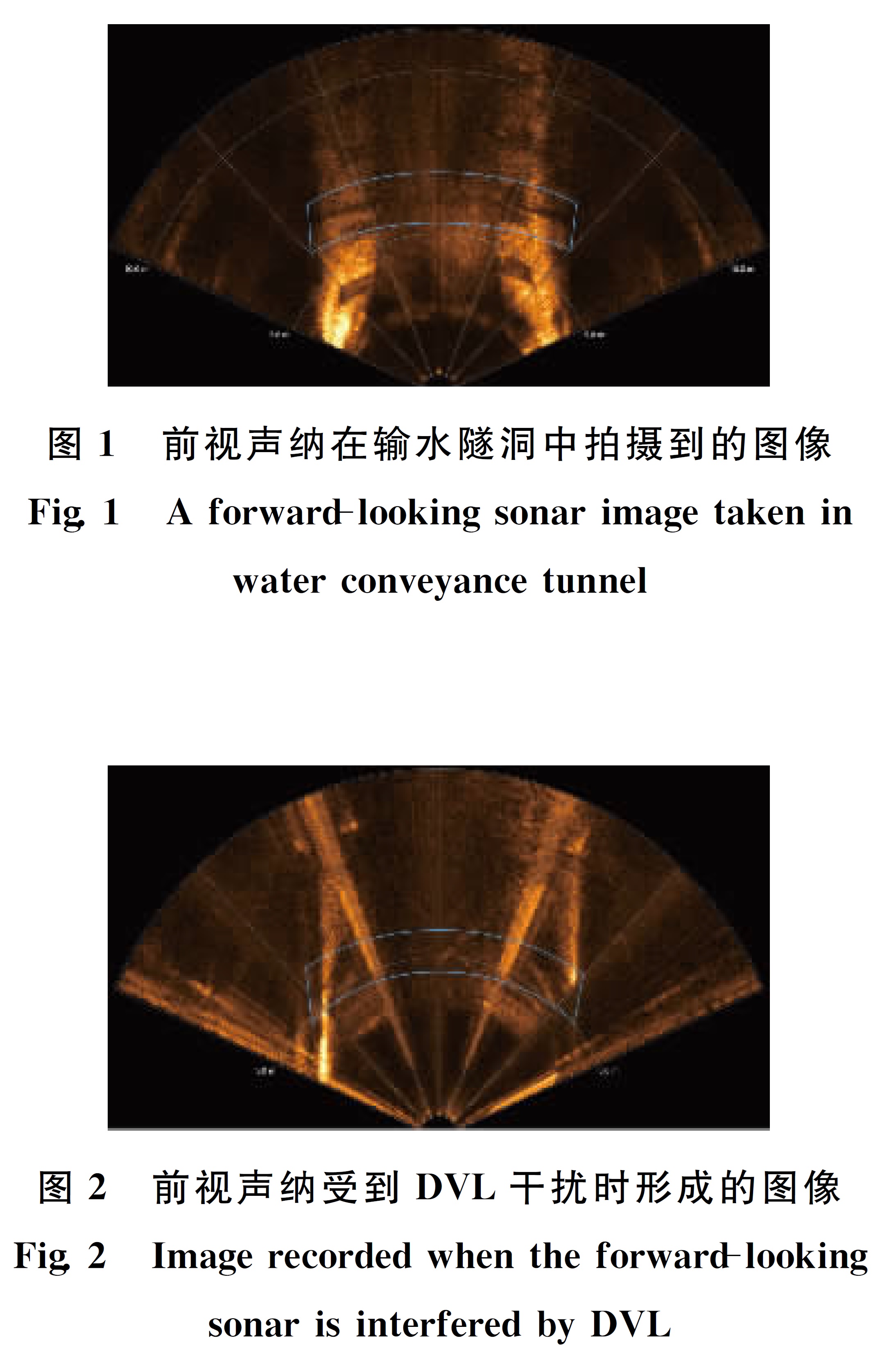
本文主要讲观察级水下机器人Valor配套的二维前视声纳,它与超短基线定位、摄像头都是水下机器人导航的重要部件。二维声纳是Tritech公司生产的,型号为Gemini 720is。 编辑 Gemini 720is主要技术参数见下表。 Gemini 720is通过一条蓝色的缆与机器人的电子舱USP9连接。 水下机器人的控制软件GSS能显示二维声纳的图像。 前视声纳
(1)(1.7) GY-US42声纳
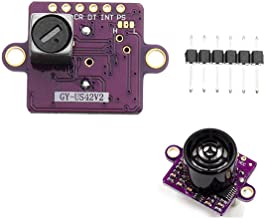
文章目录 前言 1 连接方式 2 参数说明 前言 GY-US042v2 声纳是一款非常便宜的短程(最多 4m)测距仪,主要设计用于室内,但也成功用于室外的 Copter。与许多气压计相比,它能更稳定地控制 4m 以下的高度。 1 连接方式 该传感器类似于 Maxbotix I2C 声纳测距仪(Maxbotix I2C Sonar Rangefinder),但除了

声纳--UUV扫描的典型目标特征自动提取方法研究 ---17年,哈工程,硕毕业论文
1 哈工程17年硕 声纳图像分割算法:马尔科夫随机 Gibbs随机场 Bayesian理论 多尺度边缘检测 1 声纳信息处理: 1 JSF格式 2 双边滤波法滤波 3 本文 马尔科夫随机场,K均值聚类,迭代条件模式分割 4 角,线,面特征, 根据JSF点位推算 2 流程